[Vision Transformer] An Image is Worth 16x16 Words: Transformers for Image Recognition at Scale 논문 리뷰
Tobigs1415 Image Semina
.jpg)
투빅스 14기 김민경
paper : An Image is Worth 16x16 Words: Transformers for Image Recognition at Scale (ViT)
1. INTRODUCTION
- 자연어 처리(NLP)에서는 Self-attention 기반 아키텍처, 특히 Transformer를 주로 사용한다.
- Transformer의 계산 효율성과 scalability 덕분에, 100B 이상의 파라미터를 사용하여 전례없는 크기의 모델을 학습할 수 있게 되었다.
- 그러나, 컴퓨터비전에서는 CNN 아키텍처가 여전히 우세하다.
- NLP 성공에 영감을 받은 여러 연구는 CNN과 유사한 아키텍처를 self-attention과 결합하려고 시도했지만, 대규모 이미지 인식에서 고전적인 ResNet같은 아키텍처가 여전히 SOTA이다.
- 해당 논문에서는 NLP의 Transformer 확장 성공에 영감을 받아, 가능한 최소한의 수정으로 standard Transformer를 이미지에 직접 적용하는 실험을 한다.
- strong regularization 없이 ImageNet과 같은 Mid-sized datasets에 대해 train된 경우, 비슷한 크기의 ResNet보다 몇 % 낮은 정확도를 보여준다.
→ 이는 겉보기에 실망스러운 결과일 수 있다.
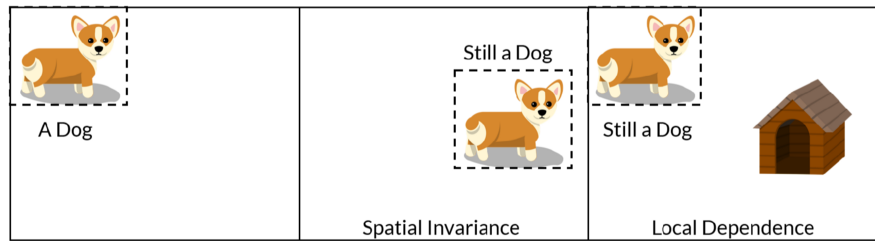
→ Transformers는 CNN 고유의 Translation Invariance과 Locality 같은 Inductive Biases가 부족해서 충분하지 않은 양의 데이터로 train할 때 잘 일반화되지 않기 때문이다.
- Inductive Bias?
: 학습 시에는 경험하지 않은 input이 주어져도 output의 적절한 귀납적 추론이 가능하도록 하기 위한 일련의 가정- 문제(데이터)의 특성에 맞게 적절한 Inductive Bias를 가지는 알고리즘을 사용해야 높은 성능을 낼 수 있는데,
CNN은 Locality와 Transitional Invariance한 특성을
RNN은 Sequentiality와 Temporal Invariance한 특성을 가진다.
- Local Translation Invariance
: 이미지의 모양이나 위치가 변하더라도 이미지에서 객체를 인식할 수 있다.
출처 : https://medium.com/analytics-vidhya/cnn-convolutional-neural-network -8d0a292b4498
- 그러나 모델이 더 큰 datasets(14M-300M images)에서 train되면 결과가 달라진다.
- 즉, 대규모 training이 inductive bias를 능가한다는 것을 알 수 있다.
- Vision Transformer(ViT)는 충분한 규모로 pre-train 되어 더 적은 datapoints를 사용하는 태스크로 transfer될 때 탁월한 결과를 얻을 수 있다.
- public ImageNet-21k dataset 또는 사내 JFT-300M dataset에 대해 pre-train 된 ViT는 여러 이미지 인식 벤치마크에서 SOTA에 접근하거나 능가한다.
- 특히 best 모델은
ImageNet에서 88.55%,
ImageNet-ReaL에서 90.72%,
CIFAR-100에서 94.55%,
19개 태스크가 있는 VTAB 모음에서 77.63%의 정확도를 달성한다.
2. Method
2.1 Vision Transformer (ViT)
- 모델 디자인은 가능한 한 original Transformer (encoder 부분만 사용)를 따른다.
- Embedding Layer, Encoder, Final Head Classifier로 구성된다.
- Transformer encoder 부분과의 차이점은 이미지를 네트워크에 공급하는 방법에 있다.
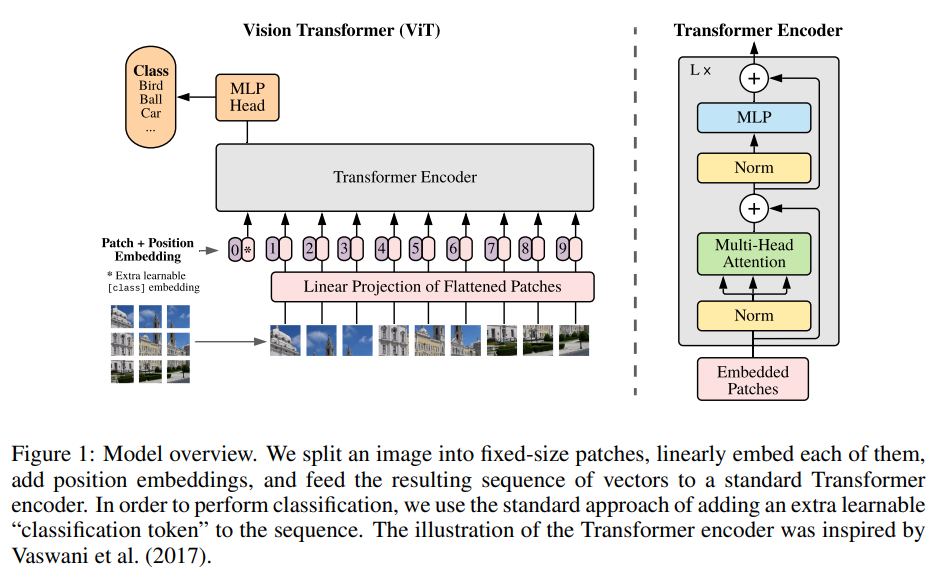
- ViT 네트워크 과정의 순서는 다음과 같다.
1. 이미지를 patches로 분할 후 flatten
2. flattened patches에서 저차원 linear embeddings 생성
3. Position embeddings 추가
4. 시퀀스를 Standard Transformer encoder에 input으로 공급
5. 이미지 labels로 모델 pre-train
(대용량 dataset에서 fully supervised)
6. 이미지 classification를 위한 downstream dataset에 대해 fine-tuning
1. 이미지를 patches로 분할 후 flatten
- standard Transformer의 input은 token embeddings의 1D 시퀀스이다.
- 따라서 2D 이미지를 처리하기 위해 이미지 를
일련의 flattened 2D 패치 로 reshape한다.- 여기서 는 원본 이미지의 해상도,
는 채널 수,
는 각 이미지 패치의 resolution이고,
는 얻게되는 patches 수이며, input 시퀀스 길이로 간주
- 여기서 는 원본 이미지의 해상도,
- 일반적으로 patch 사이즈 는 16×16 또는 32×32로 선택되며, patch 사이즈가 작을수록 시퀀스가 길어진다. (→ 모델의 전체 정확도가 향상)
- 여기서 논문의 제목인 "An Image is Worth 16X16 Words"가 나왔다.
2. flattened patches에서 저차원 Linear embeddings 생성
- Transformer는 모든 레이어를 통해 일정한 latent vector size 를 사용하므로 patches를 flatten하게 하고,
trainable Linear Projection(아래 식)을 사용하여 차원에 매핑한다.

- 는 learned embedding matrix를 의미
- 이 Linear Projection의 output을 Patch embeddings라고 한다.
3. Position embeddings 추가
- Position embeddings는 위치 정보를 유지하기 위해 Patch embeddings에 추가된다.

- 이 아닌 인 이유?
: embedded patches의 시퀀스 맨 앞에 [class] token (=)을 concat하기 때문 (BERT와 동일)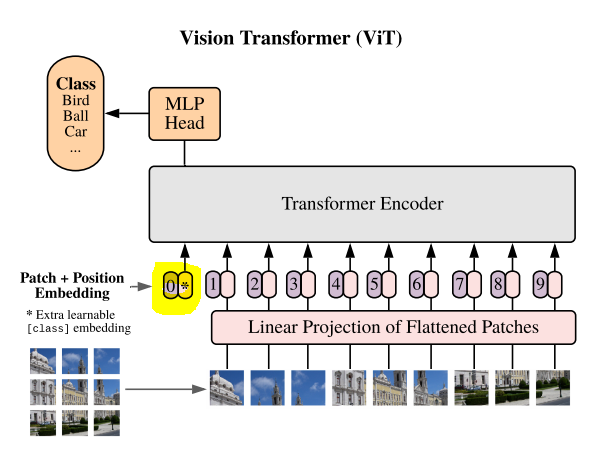
- 실험에서 1-D positional encodings과 2-D positional encodings이 거의 동일한 결과를 생성하는 것으로 나타났기 때문에 단순한 standard learnable 1D position embeddings를 사용하여 flattened patches의 위치 정보를 보존한다.
- 결과 embedding vetors의 시퀀스()는 개의 동일한 레이어로 구성된 Transformer encoder의 input이 된다.
4. 시퀀스를 Standard Transformer encoder에 input으로 공급
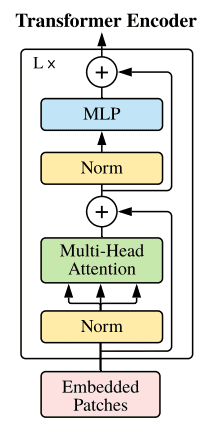
- Transformer encoder는 Multihead Self-Attention(MSA)과 MLP blocks로 구성된다.
- LayerNorm(LN)은 모든 블록 이전에 적용되고 Residual Connections는 모든 블록 이후에 적용된다.
- MLP는 GELU non-linearity가 있는 두 개의 레이어로 구성된다.

- Transformer encoder의 ouput에서 시퀀스의 첫 번째 요소인 을 MLP Head(Classification head)에 넣어 class label을 예측 한다.
# ViT 구현
# 출처 : https://theaisummer.com/vision-transformer/
import torch
import torch.nn as nn
from einops import rearrange
from self_attention_cv import TransformerEncoder
class ViT(nn.Module):
def __init__(self, *,
img_dim,
in_channels=3,
patch_dim=16,
num_classes=10,
dim=512,
blocks=6,
heads=4,
dim_linear_block=1024,
dim_head=None,
dropout=0, transformer=None, classification=True):
"""
Args:
img_dim: the spatial image size
in_channels: number of img channels
patch_dim: desired patch dim
num_classes: classification task classes
dim: the linear layer's dim to project the patches for MHSA
blocks: number of transformer blocks
heads: number of heads
dim_linear_block: inner dim of the transformer linear block
dim_head: dim head in case you want to define it. defaults to dim/heads
dropout: for pos emb and transformer
transformer: in case you want to provide another transformer implementation
classification: creates an extra CLS token
"""
super().__init__()
assert img_dim % patch_dim == 0, f'patch size {patch_dim} not divisible'
self.p = patch_dim
self.classification = classification
tokens = (img_dim // patch_dim) ** 2
self.token_dim = in_channels * (patch_dim ** 2)
self.dim = dim
self.dim_head = (int(dim / heads)) if dim_head is None else dim_head
self.project_patches = nn.Linear(self.token_dim, dim)
self.emb_dropout = nn.Dropout(dropout)
if self.classification:
self.cls_token = nn.Parameter(torch.randn(1, 1, dim))
self.pos_emb1D = nn.Parameter(torch.randn(tokens + 1, dim))
self.mlp_head = nn.Linear(dim, num_classes)
else:
self.pos_emb1D = nn.Parameter(torch.randn(tokens, dim))
if transformer is None:
self.transformer = TransformerEncoder(dim, blocks=blocks, heads=heads,
dim_head=self.dim_head,
dim_linear_block=dim_linear_block,
dropout=dropout)
else:
self.transformer = transformer
def expand_cls_to_batch(self, batch):
"""
Args:
batch: batch size
Returns: cls token expanded to the batch size
"""
return self.cls_token.expand([batch, -1, -1])
def forward(self, img, mask=None):
batch_size = img.shape[0]
# 이미지를 patches로 분할 후 flatten
img_patches = rearrange(
img, 'b c (patch_x x) (patch_y y) -> b (x y) (patch_x patch_y c)',
patch_x=self.p, patch_y=self.p)
# Linear Projection
img_patches = self.project_patches(img_patches)
if self.classification:
img_patches = torch.cat(
(self.expand_cls_to_batch(batch_size), img_patches), dim=1)
# Position embeddings 추가
patch_embeddings = self.emb_dropout(img_patches + self.pos_emb1D)
# feed patch_embeddings and output of transformer. shape: [batch, tokens, dim]
y = self.transformer(patch_embeddings, mask)
if self.classification:
# we index only the cls token for classification.
return self.mlp_head(y[:, 0, :])
else:
return y
2.2 Pre-training & Fine-tuning
5. Pre-training
-
1k개 클래스, 1.3M개의 이미지가 있는 ImageNet,
21k개 클래스, 14M개의 이미지가 있는 superset ImageNet-21k,
18k개 클래스, 303M개의 고해상도 이미지가 있는 Google private JFT를 사용 -
weight decay = 0.1, batch size = 4096, = 0.9, = 0.999인 Adam optimizer를 사용한다.
6. Fine-tuning
- Pre-training 에 사용된 입력 이미지보다 높은 해상도로 Fine-tuning을 수행한다.
- train된 모델들을 여러 벤치마크 tasks로 transfer한다.
: original ImageNet, ImageNet-ReaL, CIFAR-10/100, Oxford-IIIT Pets와 Oxford Flowers-102, VTAB(Natural, Specialized, Structured) - 모든 모델에 대해 batch size = 512인 SGD w/ momentum을 사용한다.
* Hybrid Architecture (ViT의 변형)
- input 시퀀스인 raw image patches는 CNN의 피처맵으로 대체될 수 있다.
- Hybrid model은 patch embedding projection 가 CNN 피처맵에서 추출된 patch들에 적용된다.
- 해당 논문에서는 실험을 위해 ViT에 ResNet50을 이미지에 적용하여 얻은 intermediate 피처맵을 input으로 주었다. (patch 사이즈가 "pixel"임)
- 아래 그림은 ViT, Hybrid, ResNets 세 모델의 pre-training compute 성능을 나타낸 것이다.
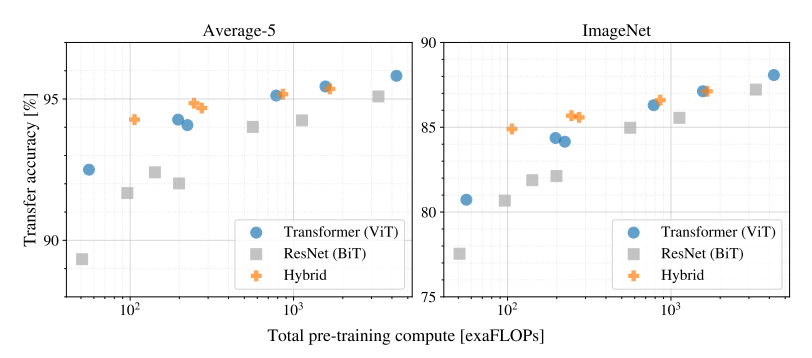
- ViT는 동일한 computational budget으로 ResNet을 능가한다.
(ViT는 동일한 성능을 얻기 위해 약 2~4배 적은 컴퓨팅을 사용) - Hybrid는 모델 크기가 작은 경우 기본 ViT보다 향상되고 모델 크기가 커지면서 차이가 사라지는 것을 볼 수 있다.
→ 어떤 사이즈에서든 ViT를 지원하는 컨볼루션 local feature processing을 기대할 수 있기 때문에 향후 주목할만 하다. - 또한, ViT는 실험된 범위 내에서 "saturate"되지 않는 것으로 보이기 때문에 향후 확장 가능성을 기대할만 하다.
3. Experiments
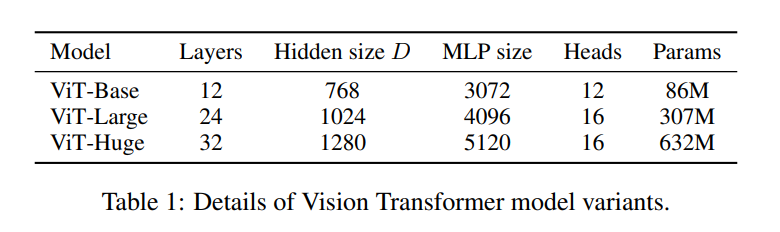
3.1 Vision Transformer Variants
- classification 정확도에 대한 모델 사이즈 증가의 효과를 실험하기 위해
"ViT-Base", "ViT-Large", "ViT-Huge"와 같은 다양한 버전의 ViT를 제안한다. - 세 가지 버전은 encoder의 레이어 수, hidden dimension 사이즈, MSA 레이어에서 사용하는 attention head 수, MLP classifier 사이즈가 다르다.
- 각 모델은 16×16, 32×32 크기의 patch로 학습된다.
- ViT-Base
: Transformer encoder에 12개의 레이어, 12개의 attention heads, 768의 hidden dimension 사이즈를 가진다. - ViT-Large
: Transformer encoder에 24개의 레이어, 16개의 attention heads, 1024의 hidden dimension 사이즈를 가진다. - ViT-Huge
: Transformer encoder에 32개의 레이어, 16 개의 attention heads, 1280의 hidden dimension 사이즈를 가진다.
- 다른 크기를 갖는 Vision Transformers에 대한 실험 결과는
더 높은 정확도를 얻기 위해 상대적으로 더 깊은 모델을 사용하는 것이 중요하다는 것을 보여준다.
3.2 Comparison to State Of The Art
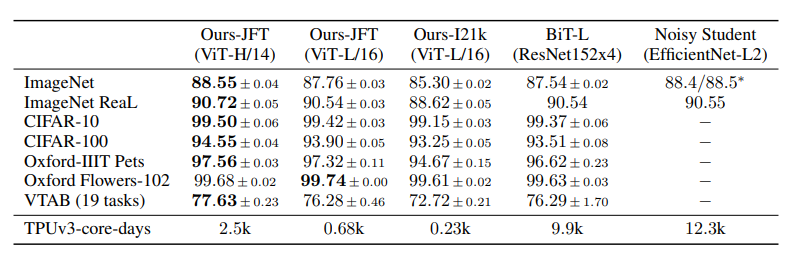
- JFT-300M에서 pre-training된 더 작은 ViT-L/16 모델은 모든 태스크에서 BiT-L(동일한 dataset에 대해 pre-training 됨)보다 성능이 뛰어나며 학습에 필요한 컴퓨팅 리소스가 훨씬 적다.
- 더 큰 모델인 ViT-H/14는 특히 ImageNet, CIFAR-100와 VTAB과 같은 보다 까다로운 datasets에서 성능을 더욱 향상시킨다.
- 이 모델은 이전의 SOTA보다 pre-training에 훨씬 적은 컴퓨팅을 사용했다.
- 아래 표는 VTAB를 Natural, Specialized, Structured 각 그룹으로 분해하고, 이 벤치마크에서 이전 SOTA 방법과 비교한 결과이다.
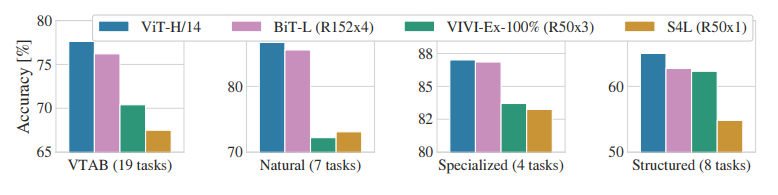
- ViT-H/14는 Natural과 Structured 태스크에서 BiT-L(152x4)과 기타 방법들을 능가한다.
3.2 Inspecting Vision Transformer
- ViT가 이미지를 처리하는 과정을 이해하기 위해 내부 표현을 분석하는 실험을 했다.
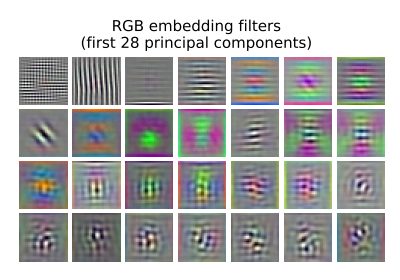
(1) Filters of the initial linear embedding of RGB values of ViT-L/32
- Vision Transformer의 첫 번째 레이어는 flattened patches를 더 낮은 차원의 공간에 Linearly Projection한다.
- 아래 그림은 학습된 embedding filters의 주성분(principal components)을 보여준다.
(2) Similarity of position embeddings of ViT-L/32
- 아래 그림은 모델이 position embeddings의 similarity에서 이미지 내 거리를 인코딩하는 방법을 학습함을 보여준다.
즉, 더 가까운 patches는 더 유사한 position embeddings를 갖는 경향이 있다. - 또한 row-column structure가 나타난다.
: 동일한 행/열에 있는 patches는 유사한 embeddings을 가진다.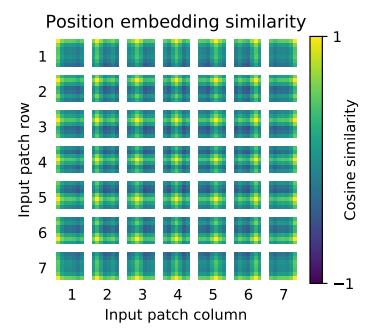
(3) Size of attended area by head and network depth
- Self-attention을 통해 ViT는 가장 낮은 레이어에서도 전체 이미지에 대한 정보를 통합할 수 있게한다.
- 아래 그림은 네트워크가 이 기능을 어느 정도 사용하는지 알아본 실험 결과이다.
(head와 network depth에 따른 attended area의 사이즈) - 각 점은 한 레이어에있는 16개의 head 중 하나에 대한 이미지에서의 attention distance를 의미한다.
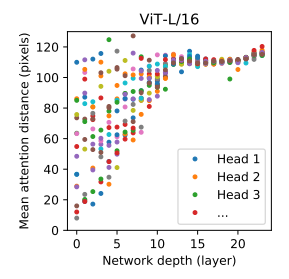
- 일부 heads가 이미 가장 낮은 레이어에 있는 대부분의 이미지에 주의를 기울여 정보를 global하게 통합하는 기능이 실제로 모델에서 사용됨을 알 수 있다.
반면, 다른 attention heads는 낮은 레이어에서 지속적으로 작은 attention distances를 갖는다.
4. Conclusion
- Image Recognition에 Transformers를 직접 적용하는 방법을 살펴 보았다.
- 컴퓨터비전에서 self-attention을 사용하는 이전 연구들과 달리, 해당 연구는 초기 patch extraction 단계를 분리하여 image-specific inductive biases를 아키텍처에 도입하지 않는다.
대신 이미지를 patches 시퀀스로 해석하고 NLP에서 사용되는 standard Transformer encoder로 처리한다. - 이 간단하면서도 확장 가능한 전략은 대규모 datasets에 대한 pre-training과 결합될 때 매우 잘 작동한다.
- 따라서 Vision Transformer는 많은 image classification datasets에서 SOTA 비슷하거나 능가하는 동시에 pre-training 비용이 상대적으로 낮다.
- 이러한 초기 결과는 고무적이지만 많은 과제가 남아 있다.
(1) detection과 segmentation 같은 다른 컴퓨터비전 태스크에 ViT를 적용하는 것
(2) self-supervised pre-training 방법을 계속 탐구하는 것 - 우리의 초기 실험은 self-supervised pre-training의 개선을 보여주지만, self-supervised pre-training과 large-scale supervised pre-training 사이에는 여전히 큰 차이가 있다.
- 마지막으로 ViT를 추가로 확장하면 성능이 향상될 수 있다.
5. 질문 내용 추가
(1) Attention Distance
Q. "attention distance"의 개념이 궁금합니다.
A. CNN의 receptive field size와 유사한 개념이라고 합니다.
(2) Self-supervised
Q. ViT에서 Self-supervised가 어떻게 학습이 되나요?
A. 논문의 APPENDIX B.1.2에서 masked patch prediction objective를
이용했다고 합니다.
그러나 간략하게만 설명해 놓았기 때문에 추가 자료를 덧붙이겠습니다.
Self-supervised vision Transformer를 제안한 논문인 SiT: Self-supervised vIsion Transformer를 참고하시면 좋을 것 같습니다:)
- 이 연구의 주요 목표는 unsupervised 방식으로 data representation을 학습하는 것이다.
- 이것은 이미지의 일부가 masking되거나 transform된 local 부분을 완성함으로써 달성된다.
- 기본 가설은 전체 visual field의 context를 기반으로 이미지의 손상된 부분을 손상되지 않은 부분에서 복구함으로써 네트워크가 visual integrity(무결성)의 개념을 은연중에 학습한다는 것이다.
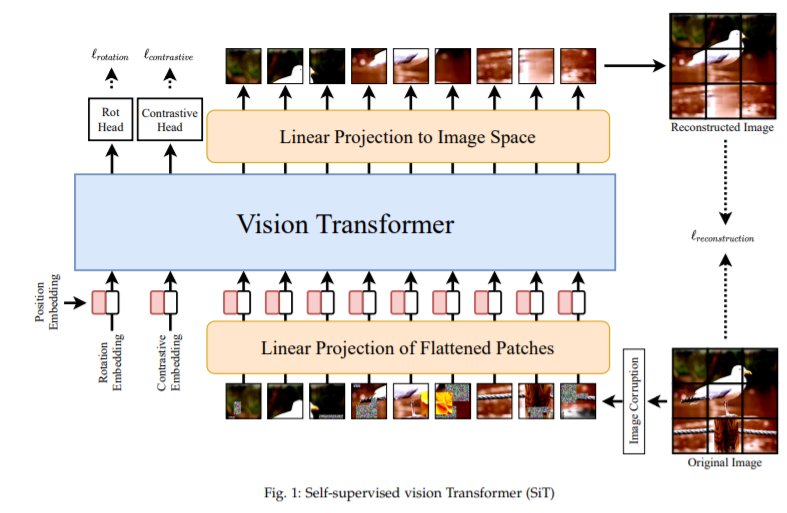
- (1) Image reconstruction, (2) Rotation prediction, (3) Contrastive learning 이렇게 세 개의 objectives를 사용해서 train한다.
(3) ViT에서 Q, K, V의 의미
- 아래 링크들을 참고하시면 좋을 것 같습니다.
- https://www.youtube.com/watch?v=QkwNdgXcfkg&t=348s&ab_channel=%ED%85%90%EC%B4%88
13:00 부터 참고 - https://hongl.tistory.com/234
REFERENCE
- https://enfow.github.io/paper-review/graph-neural-network/2021/01/11/relational_inductive_biases_deep_learning_and_graph_netowrks/
- https://keras.io/examples/vision/image_classification_with_vision_transformer/
- https://theaisummer.com/vision-transformer/
- Vision Transformers for Remote Sensing Image Classification (Yakoub Bazi, Laila Bashmal, Mohamad M. Al Rahha, Reham Al Dayil and Naif Al Ajlan)
- https://engineer-mole.tistory.com/133

3개의 댓글

이 리뷰에 따르면 Vision Transformers는 더 뛰어난 성능과 더 저렴한 컴퓨팅 비용으로 사진 인식에 혁명을 일으킬 수 있습니다. NLP와 컴퓨터 비전의 결합은 매력적이며 시각적 문제에 대한 새로운 방법을 가능하게 합니다. geometry dash

14기 김상현
이번 강의는 Vision Transformer에 대한 강의로 김민경님께서 진행해주셨습니다.
ViT에 대해 자세히 설명해주셨고, 질문들에 대해 추가자료를 조사해주셔서 더 깊은 이해를 할 수 있었습니다.
유익한 강의 감사합니다.