위성영상으로부터 3d 디지털트윈을 구현하는 거대한..프로젝트에서
위성영상 가공 파이프라인을 맡아 구현하면서 공부했던 내용들을 정리해봄.
https://www.earthdata.nasa.gov/learn/earth-observation-data-basics/remote-sensing
https://blog.si-analytics.ai/55
https://en.wikipedia.org/wiki/Remote_sensing
위 문서를 주로 참고하였음.
1. Remote Sensing

: 원격탐사(Remote Sensing)는 원거리에서 센서를 이용해 지표면 또는 대기에서 반사되거나 방출된 복사(전자기파) 를 멀리서 감지/측정하는 기법.
- 센서는 주로 위성, 드론, 항공기에 탑재됨.
- 그중 위성에 주로 탑재되는 센서와 그 센서를 활용한 원격탐사 기술 위주로 작성해보겠음.
2. Sensor
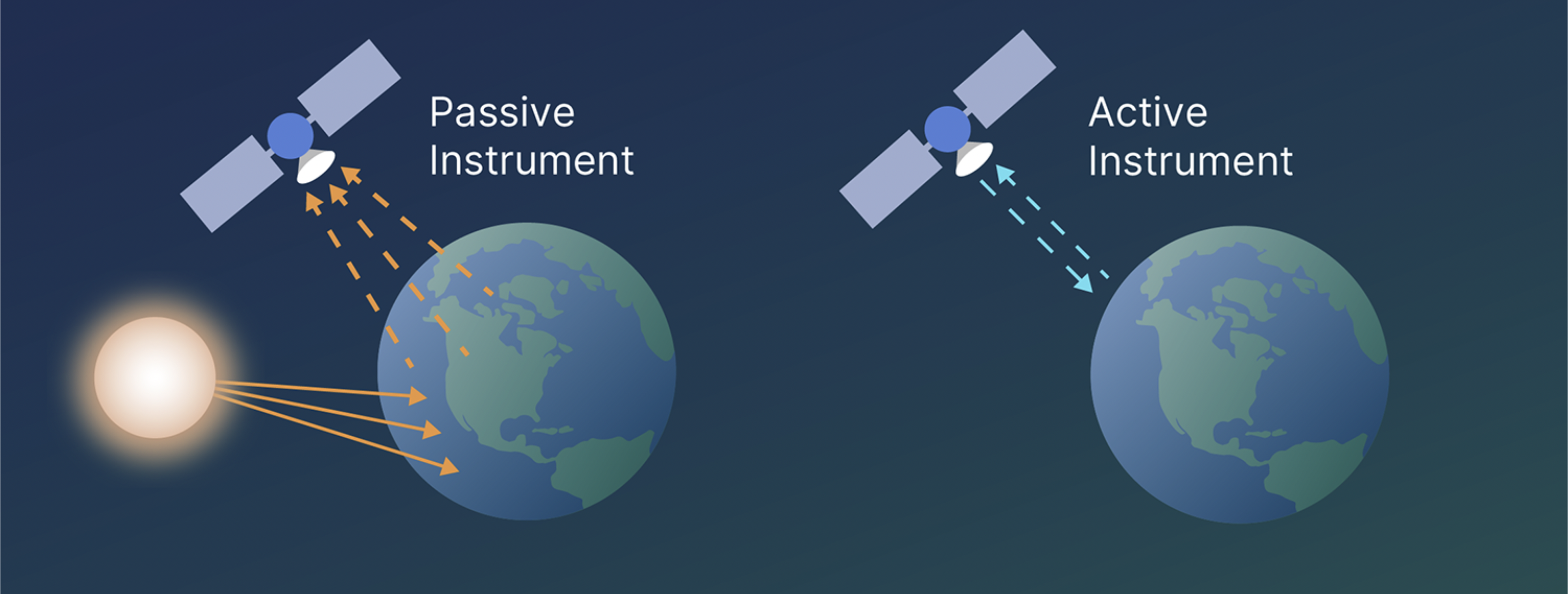
<Source(s) : Diagram of a passive instrument versus an active instrument./NASA>
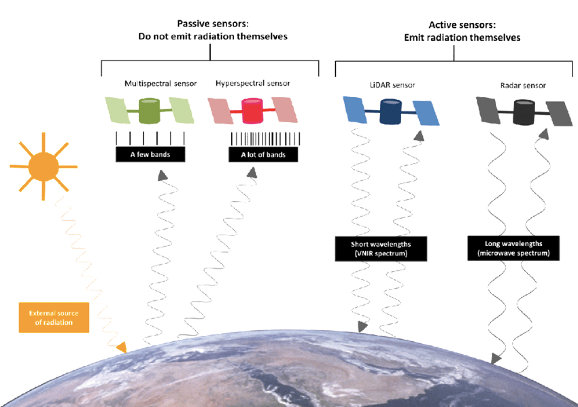
센서는 크게 수동(Passive)와 능동(Active)으로 나뉘는데,
- 수동 : 태양 등 자연광을 이용하여 지표·대기에서 반사되거나 방출된 복사 에너지를 측정 (EO,IR)
- 능동 : 센서가 자체적으로 전파나 레이저를 발사하고, 그 반사 신호를 측정하여 표면 특성을 파악함 (SAR, LiDAR)
저궤도위성에 주로 탑재되는 센서들을 정리하자면,
(1) EO (Electro-Optical Sensor = 광학)
- 태양빛이 지표에서 반사된 복사 에너지(Reflected Solar Radiation) 를 감지
- 가시광선(RGB), 근적외선(NIR), 단파장적외선(SWIR) 등 다양한 밴드 사용
- 대표적으론
- Landsat-8/9
- Sentinel-2
- KOMPSAT-3/3A**
구름이 많거나 야간에는 관측 불가
(2) SAR (Synthetic Aperture Radar = 합성개구레이더)
- 마이크로파(전파) 를 직접 발사하고 반사되는 신호를 감지
- 주야간/구름/강수에도 관측 가능 (기상 무관)
- 대표적으로
- Sentinel-1
- KOMPSAT-5
- RADARSAT
- ICEYE(=핀란드 초소형 SAR 위성
- 활용
- 지반침하, 지진, 화산 변형 (InSAR)
- 홍수, 산사태, 산림, 습지,,,,
(주로 SAR 데이터의 빛의 변화 감지를 활용한 시계열 분석에 사용됨)
(3) LiDAR (Light Detection and Ranging)
- 고출력 레이저 펄스를 쏘고 레이저가 목표물에 맞고 반사되는 시간을 측정 -> 고정밀 3D구조 파악
- 레이더랑 동일한 방식이지만 전파가 아닌 레이저를 이용한다는 점!
거리를 비롯해 폭과 고도 정보까지 측정하여 대상을 3차원으로 인식함.
(-> DEM, DSM 생성)
라이다 센서는 레이저를 여러 갈래로 쪼개어 발사하는데, 16, 32, 64개 등 채널 수 높아질수록 정밀해짐.
-> 3D mapping에 용이함.
(4) TIR (Thermal Infrared Sensor = 열적외선)
- 지표에서 나오는 열에너지를 감지 (야간 관측 가능)
- 온도 변화, 열섬현상, 화산활동 등 분석 가능
- 대표적으로
- Landsat-8 (TIRS 밴드)
- MODIS
단, 공간해상도는 낮은 편 (TIRS 100m-1km)
사실 이건 써본적이 없어서 잘 모르겠음..
3. Resolution
여기서 해상도는 화질을 뜻하는게 아님!!
| 해상도 종류 | 설명 | 예시 |
|---|---|---|
| 공간 해상도 (Spatial Resolution) | 하나의 픽셀이 실제 지상에서 얼마나 넓은 영역을 나타내는가 | 10m 해상도 → 픽셀 하나가 10×10m |
| 분광 해상도 (Spectral Resolution) | 센서가 감지할 수 있는 밴드(파장 범위)의 수와 폭 | RGB만 있는 영상 vs 13개 밴드 있는 Sentinel-2 |
| 방사 해상도 (Radiometric Resolution) | 한 밴드에서 얼마나 미세한 밝기 변화(디지털값)를 감지할 수 있는가 | 8bit (256단계), 12bit (4096단계) |
| 시간 해상도 (Temporal Resolution) | 동일한 장소를 얼마나 자주 촬영할 수 있는가 | Sentinel-2: 5일, MODIS: 1일 |
해상도가 높다 = 정밀하게 본다는 뜻이지만, 그만큼 데이터량도 커짐.
4. BAND
이건 바빠서 나중에 작성하겠음.
5. Elevation Model
| 종류 | 의미 | 형태 |
|---|---|---|
| DEM (Digital Elevation Model) | 지표(땅)의 고도를 나타냄 (식생, 건물 제외) | Raster |
| DSM (Digital Surface Model) | 지표 + 위에 있는 모든 것 (건물, 나무 등 포함) | Raster |
| DTM (Digital Terrain Model) | DEM을 더 정밀하게(=보정) 만든 모델 (구조선 포함) | Vector |
(1) DEM (Digital Elevation Model)
DEM은 맨땅(지표면)의 고도를 나타내는 래스터 기반의 데이터
건물, 나무, 전선 등 인공물이나 식생을 제거한 순수한 지형 고도만 포함됨.
DEM = 바닥 고도 (Bare-earth elevation)
(2) DSM (Digital Surface Model)

DSM은 지형뿐 아니라 그 위에 있는 모든 물체(건물, 나무, 전선 등)의 고도를 포함한 모델
- LiDAR로 얻은 반사 신호는 나무 꼭대기, 건물 꼭대기에서 돌아옴 → 그래서 표면 고도가 기록됨.
- DSM은 가장 높은 지점을 나타내는 모델
(3) DTM (Digital Terrain Model)
국가마다 정의가 조금 다른데, 일반적으로 DEM보다 더 정밀한 지형 데이터를 의미함.
유럽에서는 DTM = DEM 동일한 개념으로 사용됨
- DEM보다 정밀하고, 보정이 잘 되어 있음.
- 보통 항공사진 분석(사진측량)으로 생성함.
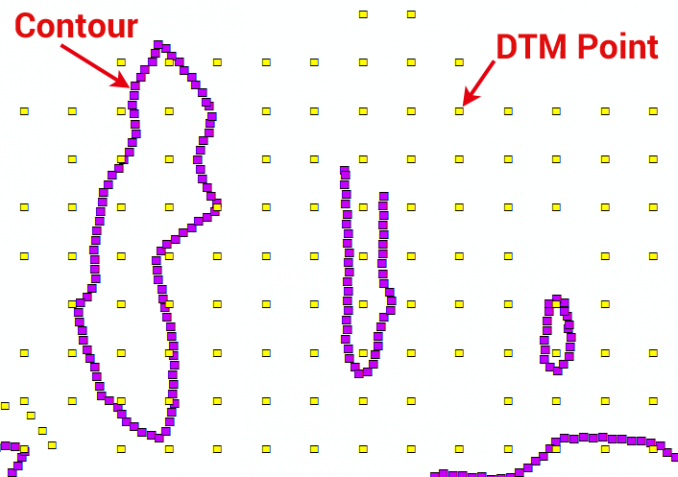
위 사진에서
DTM Point(각 노란색 grid) → 지형의 고도를 수치적으로 나타내는 점
Contour(등고선) → 지형 형상을 시각적으로 보완하는 등고선
이렇게 점과 선으로(=벡터) 지면의 형태를 자세히 묘사하는 방식임.
그러면 DTM을 interpolation을 하면 DEM을 만들어 낼 수 있겠죠?
How to capture Digital Elevation Models?
LiDAR : 고정밀 레이저로 지표 높이 측정 (DSM/DEM 모두 가능)
광학 사진 측량 (Photogrammetry) : 항공사진 2장 이상으로 깊이 추정
SAR 간섭 (InSAR) : 2개의 SAR 이미지로 지형 높이 계산 (예: SRTM)
