STM32
1.MCU의 Memory Map에 대해서
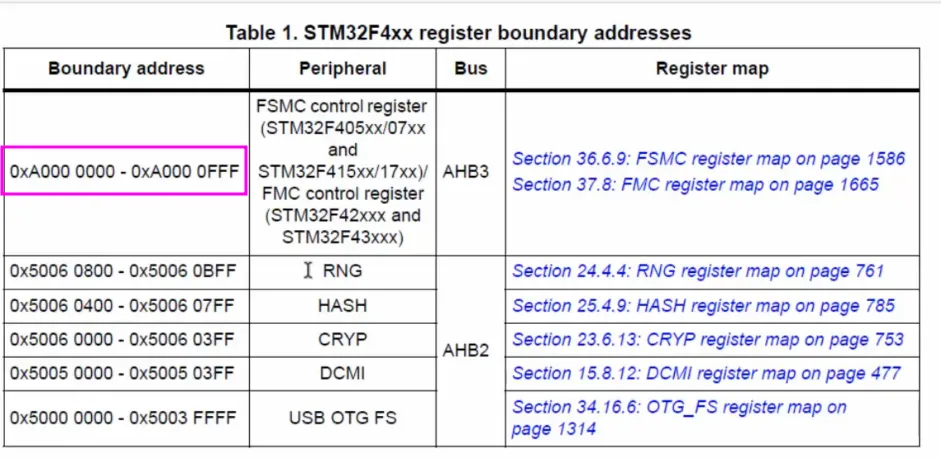
ARM Cortex M4 CPU에는 다양한 bus interface가 존재한다.이 프로세서(CPU)에는 width가 32bit인 시스템 버스가 존재한다.이러한 버스를 통해 32bit 단위(=4byte)로 플래시 메모리, 주변장치(Peripheral)들과 데이터를 처리하
2024년 12월 15일
2.ARM cortext M4 프로세서의 Bus Interface와 버스 구조, Clock Source 설명
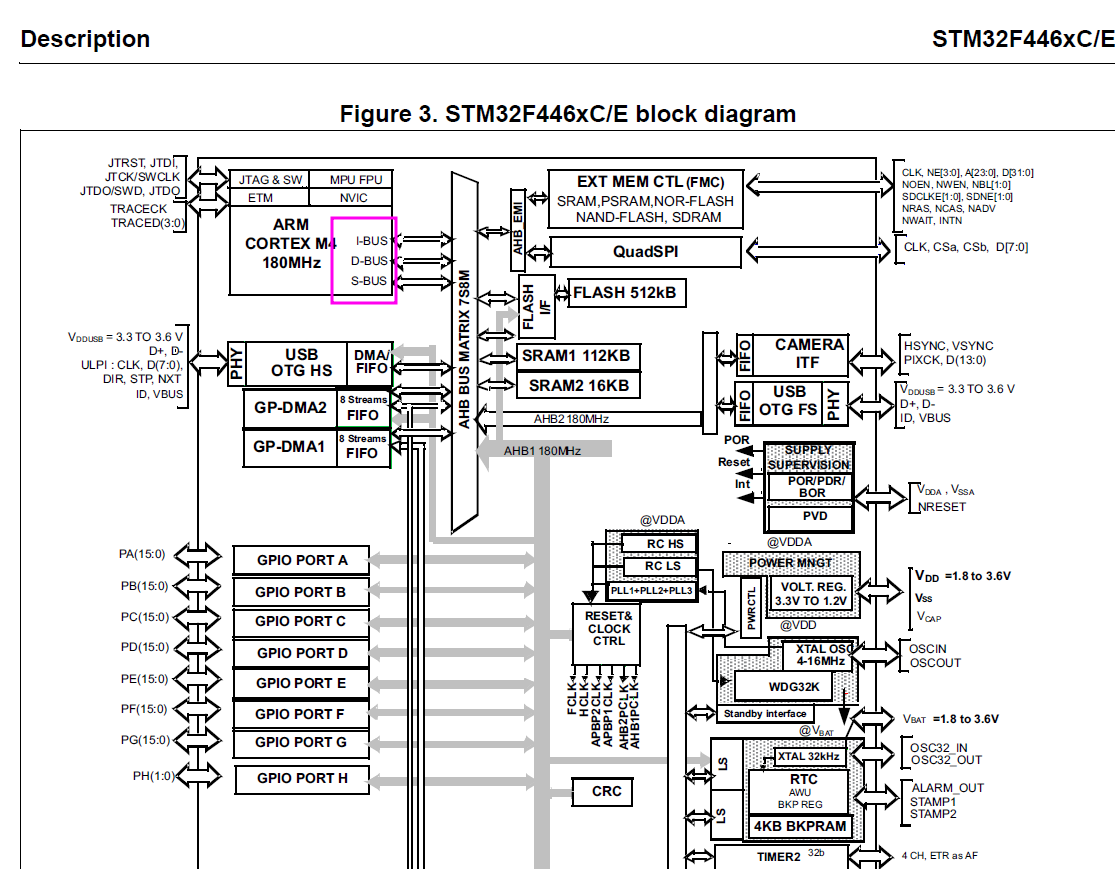
프로세서와 Peripheral은 Bus Interface를 통해 통신한다.STM32 MCU의 ARM Cortext M4 프로세서는 다양한 종류의 bus interface가 있다.1\. IBUS - 명령어 버스2\. DBUS - 데이터 버스3\. SBUS - 시스템 버스
2024년 12월 15일
3.STM32 CAN Loop Back모드 테스트 중, Tx가 되지 않을때 문제해결, CAN의 동작모드(operating modes)에 관하여
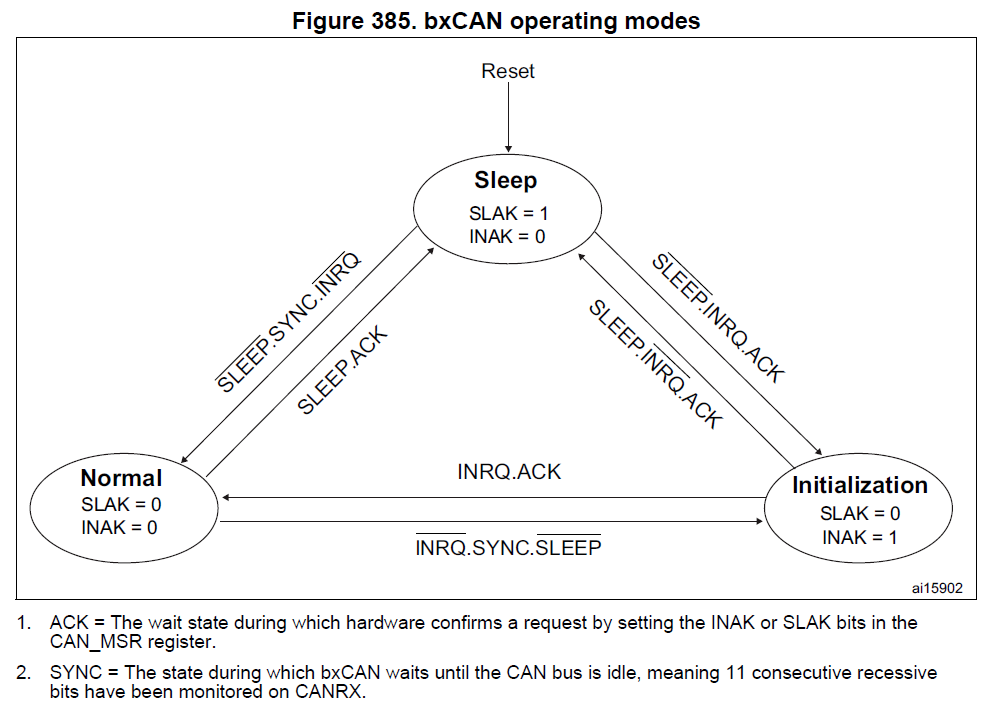
CAN Loop Back모드 테스트를 하는 중, CAN 메시지가 정상적으로 전송이 안되는 문제가 있었다.진짜 원인을 잘 모르겠어서 고생을 했다..이는 CAN의 동작 모드(operating mode)에 관한 이해가 부족했기 때문이다.. 다음 그림처럼 CAN의 동작 모드에
2024년 12월 21일
4.STM32 CAN Acceptance Filtering을 통해 특정 메시지를 수신받기
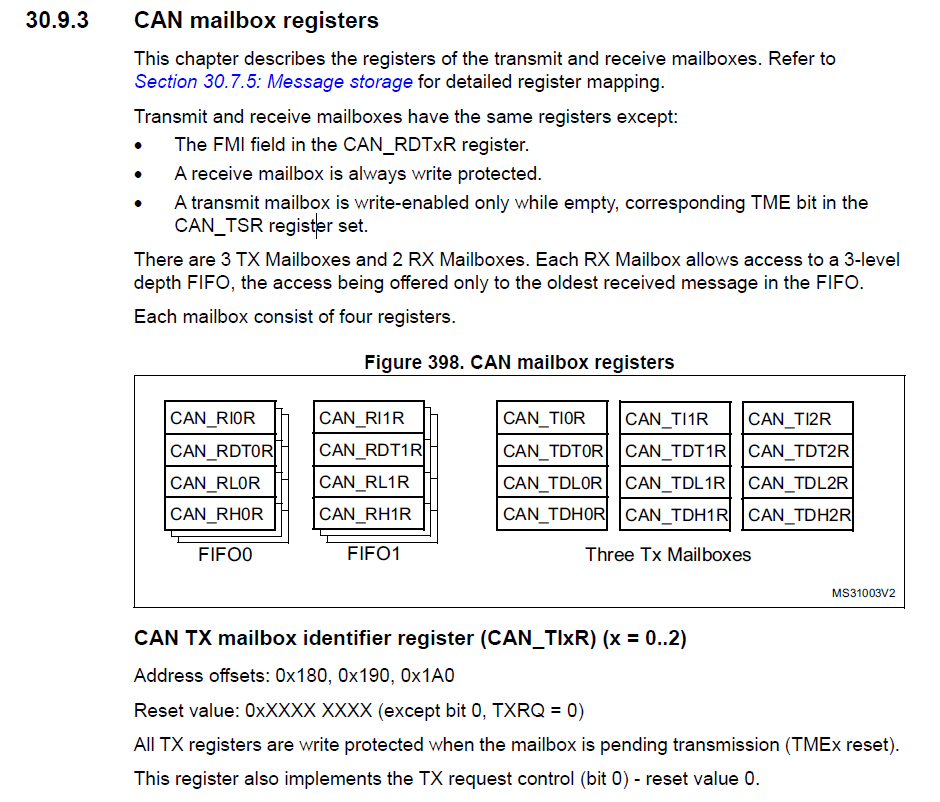
STM MCU에서는 CAN 메시지를 전송하기 위해 각각의 CAN Peripheral 마다 3개의 TX Mailbox,2개의 Receive FIFO를 가지고 있다.이 Mailbox 레지스터의 구성은 다음 그림과 같다.참고STM32F446RE Reference Manual
2024년 12월 29일