- S30~ 후반부는 구현 설명 생략하심.
context 이해 정리하고 IPC파트는 종류, 명칭 - 컨셉 매치 정도만 하도록 ~
Process Concept
job (vs process)
- job; 컴퓨터에 설치된 program + data (실행 여부 관계 x)
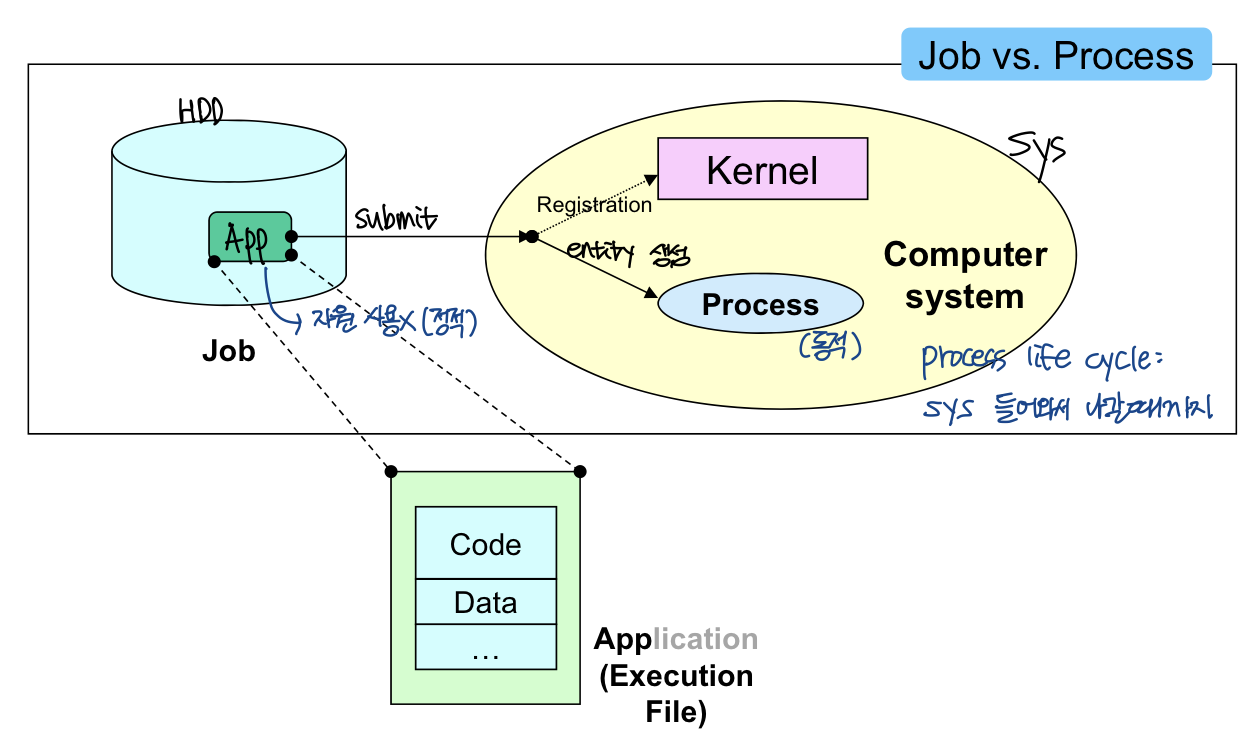
process context(5)
- program code -> text
- global data -> data
- temporary data -> stack
- local var, func param, ret adr ..
- dynamically allocated Mem area -> heap
- values of the proc regs
resource(vs process)
- passive entity (cf. process: active)
Process States & transition
- Determined by proc - rsc interaction
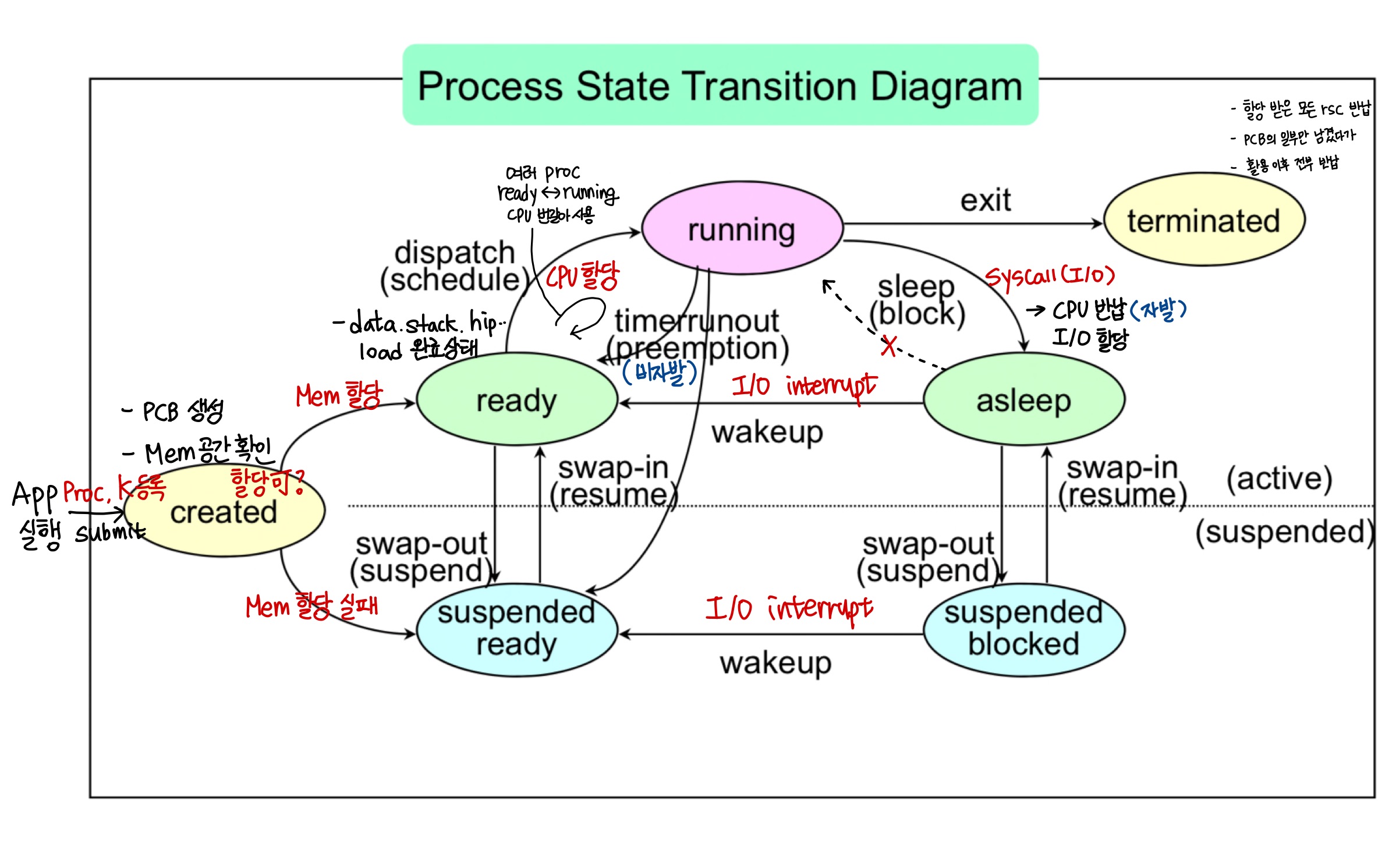
created state
K 에 proc 등록, PCB 할당받은 상태- K : mem 공간 확인 -> O: ready / X: suspended state
Q. fork()?
- UNIX 및 유닉스 기반 시스템 주요 프로세스 생성 메커니즘
- 실행 중인 프로세스가 자신의 복사본을 생성하며,
기존: parent proc, 생성: child proc - 자식 프로세스는 부모 프로세스로부터 코드, 초기 데이터 및 스택, 힙, 환경 변수, 열린 파일 디스크립터 등을 상속받지만
- 자식 프로세스는 독립된 실행 스레드 갖고 별도로 동작하며 서로의 메모리에 직접 접근 불가
+참고: fork() in c
#include <stdio.h>
#include <sys/types.h>
#include <unistd.h>
int main() {
pid_t pid;
pid = fork();
if (pid < 0) {
// 오류 처리
perror("fork failed");
return 1;
}
if (pid == 0) {
// 자식 프로세스의 코드
printf("child process with PID: %d\n", getpid());
} else {
// 부모 프로세스의 코드
printf("the parent process with PID: %d, and my child's PID is: %d\n", getpid(), pid);
}
return 0;
}
Q. 갑자기 드는 의문 sys call의 system의 def??
그냥 OS..?
ready state
Mem O -> 다른 rsc 다 있음 / CPU만 X- if processor allocation 가능 -> dispatch(=schedule)
if processor allocation 가능 X -> 그냥 waiting
dispatch
CPU 할당
ready -> running staterunning state
Mem O CPU O : 다 있다!preemption
K이 proc의 CPU 뺏음
running -> ready state- timerunout( expiration of time quantum )
- higher priority proc
block(sleep)
I/O syscall로 proc이 CPU 반납, I/O 할당 받음
running -> asleep state- processor, mem외 다른 rsc request
blocked(asleep) state
Mem O CPU X(반납) I/O Owakeup
I/O 끝냄
blocked -> readysuspended state
Mem X- suspended ready & suspended asleep
swap out = suspend
losing mem
ready -> suspended ready
asleep -> suspended asleepswap in = resume
getting mem
suspended ready -> ready
suspended asleep -> asleep -terminated/zombie state
- PCB의 일부 정보 제외 모든 rsc 반납
- 이후 전부 반납
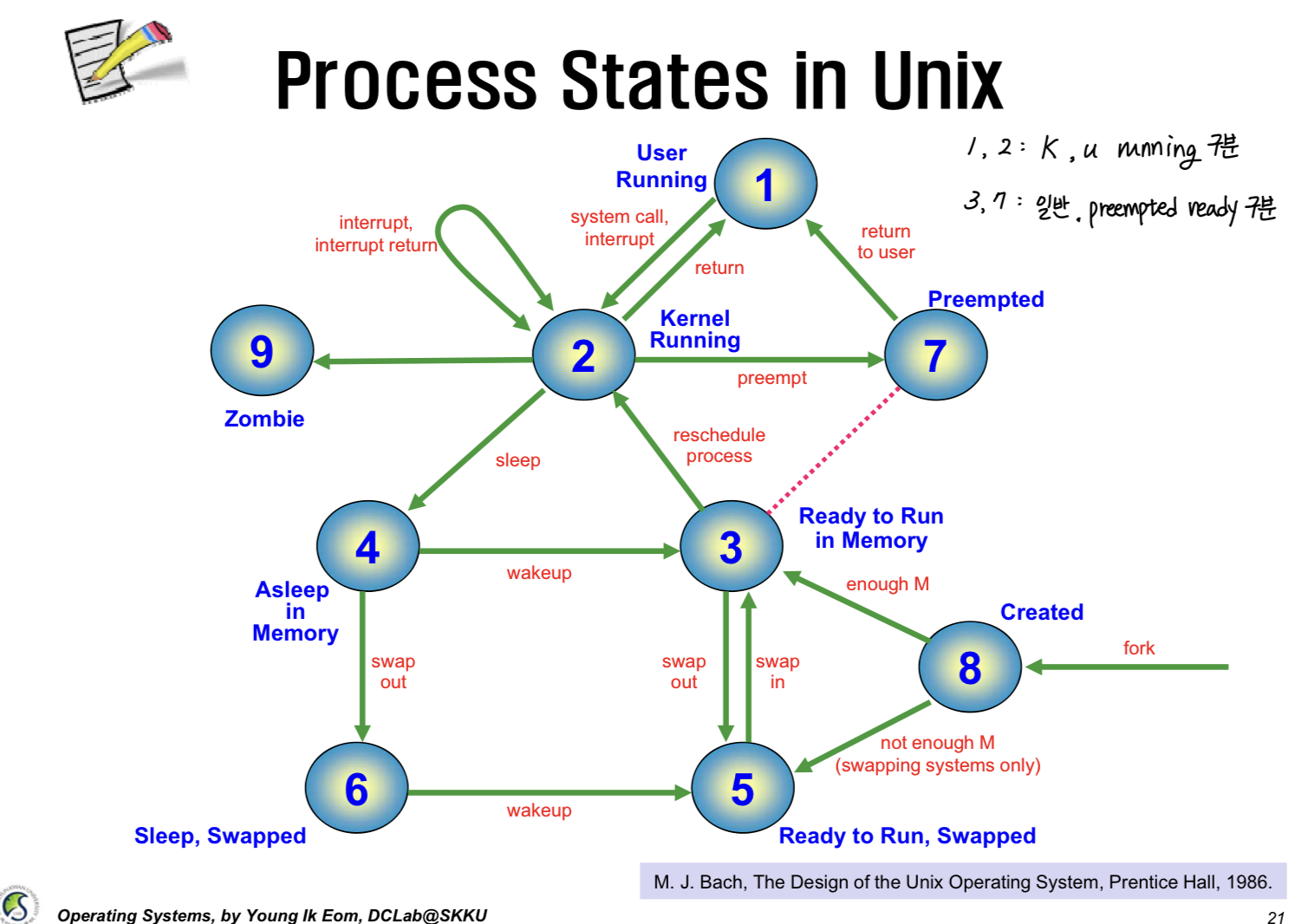
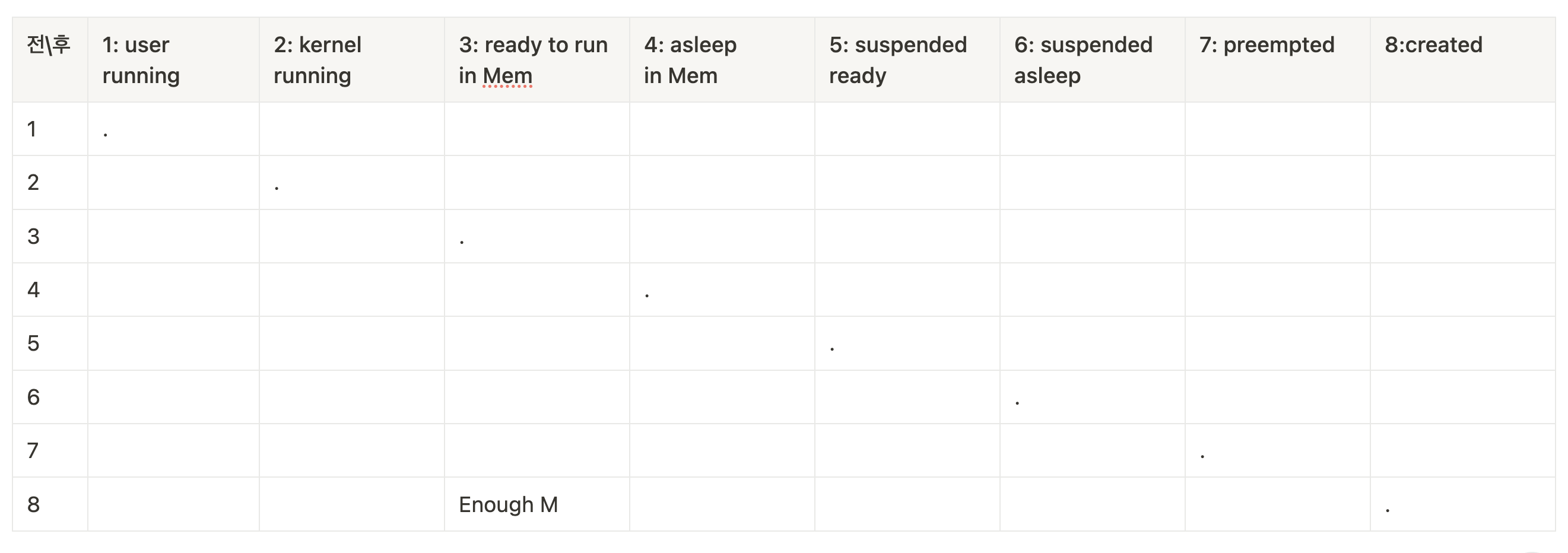
Process States in Unix(차이점)
-
1,2 : K, user의 running state를 구별함
-
3,7 : 일반 ready, preempted를 구별함
-
귀차늠 시험 전에 해보기
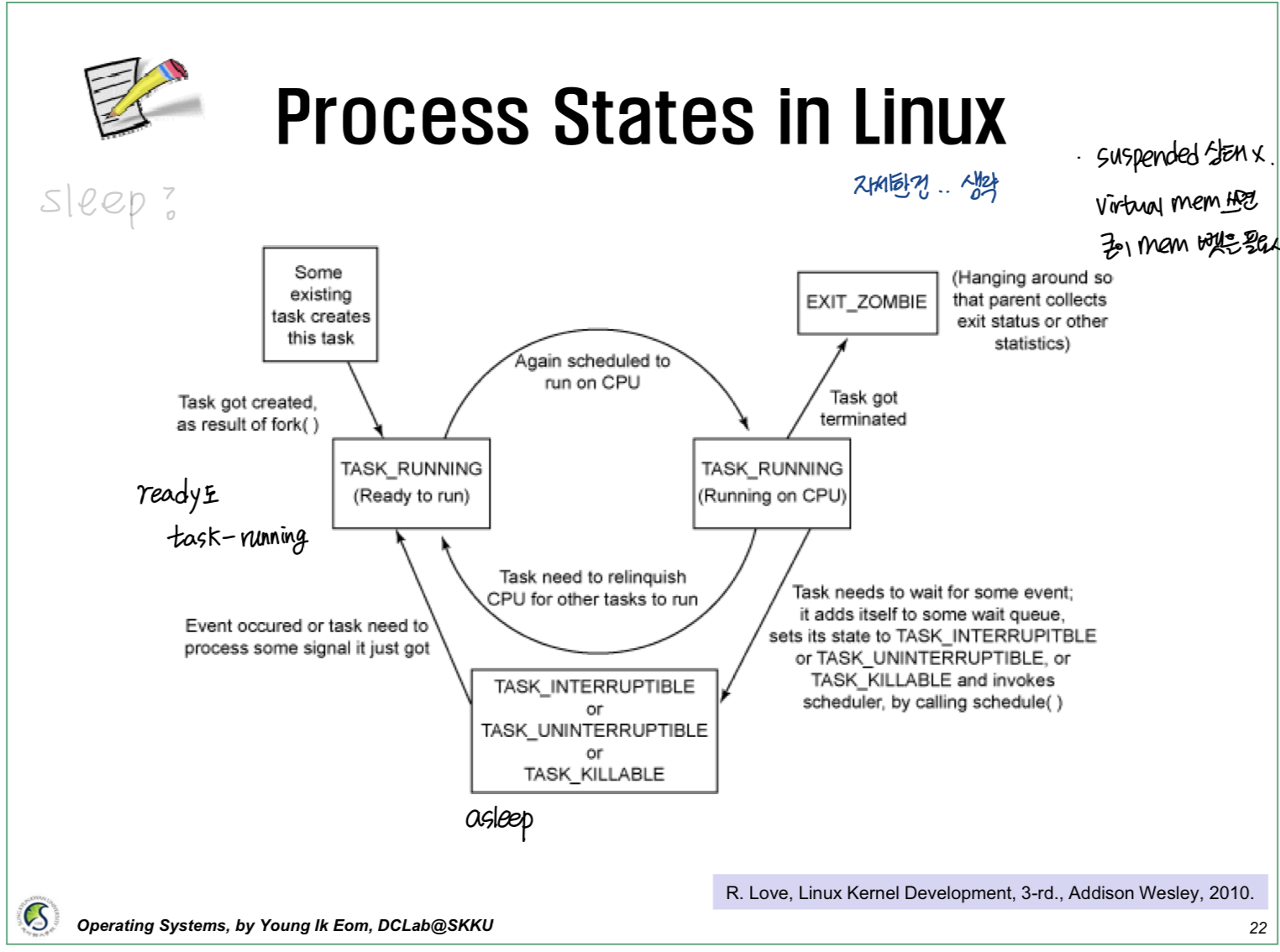
Process States in Linux(차이점)
- ready 도 task-running 이라 해
- virtual Mem 이 있어서 suspended 상태가 없음 굳이 ~?
Scheduling (간단)
Scheduler Queues
ready queue
- priority Q, 1개
asleep queue
- I/O reason별로, 여러개
scheduler 종류(3가지, term 기준)
- long-term - sys
- medium-term - mem, swapping
- short-term - cpu
Interrupt
interrupt handling process
- interrupt from external source
- pause process execution
- Interrupt handling
- check interrupt source, reason
- decision for interrupt service
지금 하는 일 vs interrupt 우선 순위 비교 - invoke ISR(interrupt service routine)
Context Switching
context (what)
ctx saving, restoring,switching
IPC(뭐 줄인거게)
IPC 필요 -> process cooperation 필요 이유?
Scheme (2가지)
Message passing
RPC (+ RMI, LRPC)
shared memory
DSM

공부 운동 잡담 .. ... . 갈 길이 멀다!!!