MLops Pipeline
1. 데이터 가져오기.
2. 데이터 탐색.(EDA)
- 클래스 분포, scale, 환경 등..
-
데이터 가공.(pre process)
- 노이즈 제거, augmentation...
-
데이터 검증.
-
데이터 나누기.
-
학습방법 결정.
-
모델 결정.
-
모델 검증.
-
대규모 학습.
...
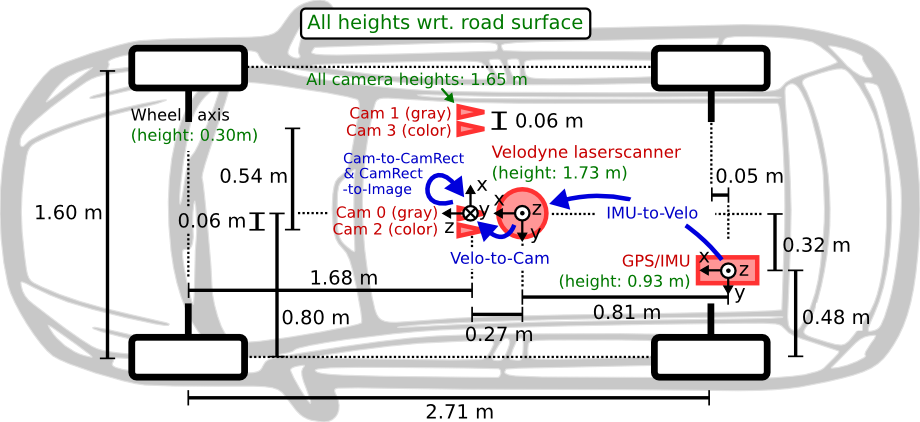
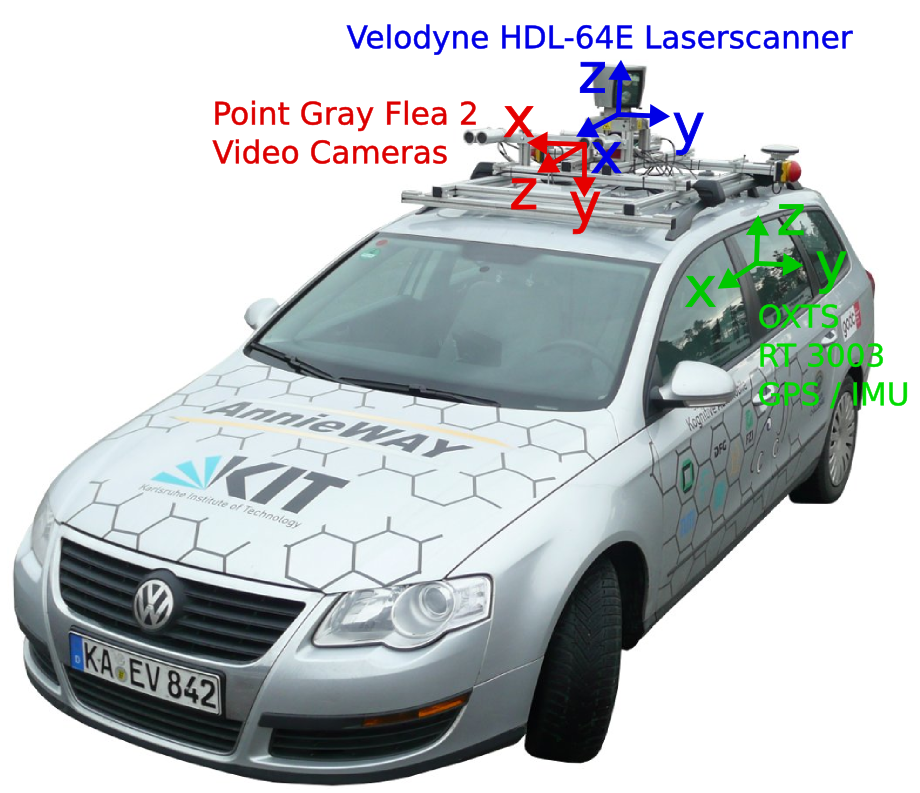
1. KITTI Dataset
Setup
1 Inertial Navigation System (GPS/IMU): OXTS RT 3003
1 Laserscanner: Velodyne HDL-64E
2 Grayscale cameras, 1.4 Megapixels: Point Grey Flea 2 (FL2-14S3M-C)
2 Color cameras, 1.4 Megapixels: Point Grey Flea 2 (FL2-14S3C-C)
4 Varifocal lenses, 4-8 mm: Edmund Optics NT59-917
Object Detection dataset
세 종류의 Object Detection Dadaset을 제공한다.
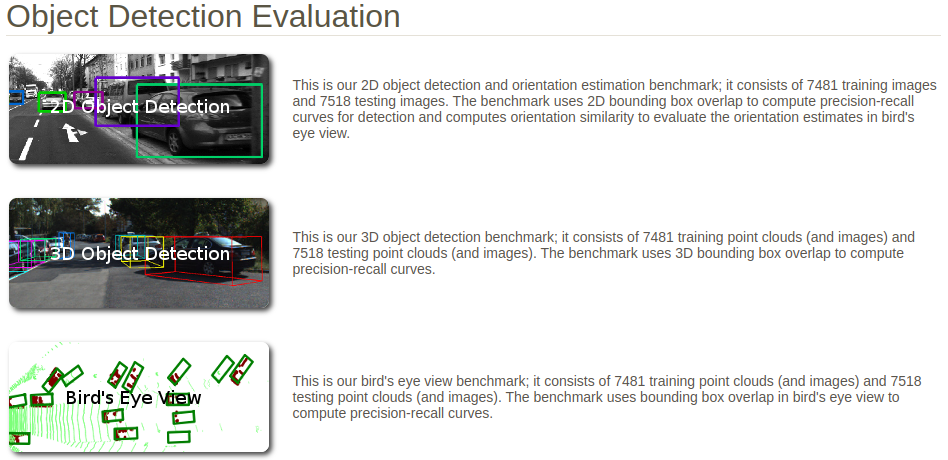
2D Object Detection
- Left, Right image.
- Lidar data.
- Calibration 정보.
- labeling data
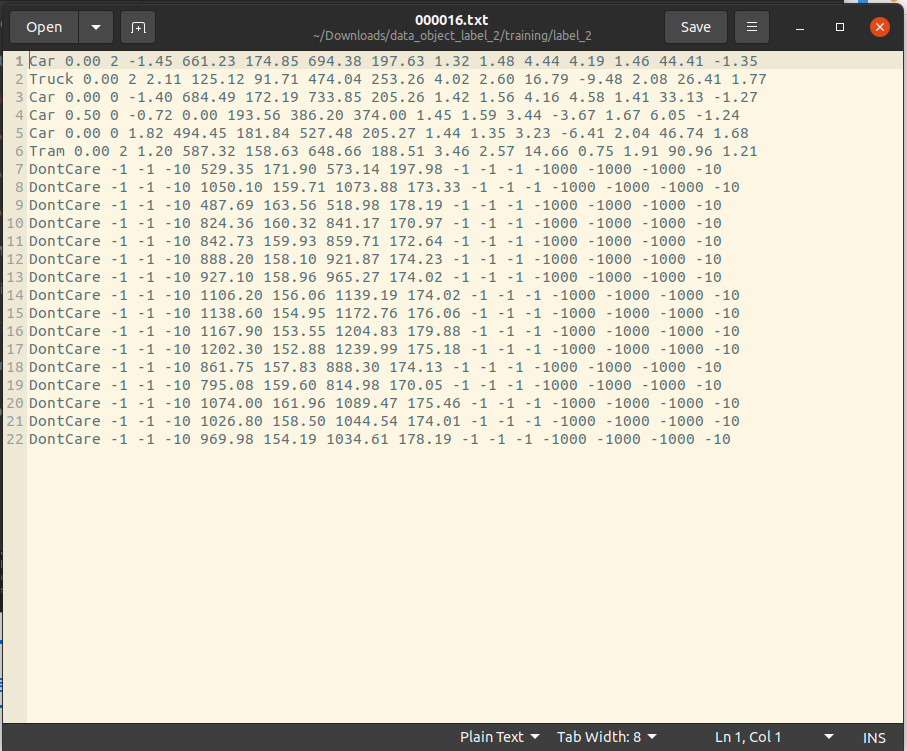
2D Object Detection Labeling Format
- object development kit을 다운로드 받아 내부의 readme.txt 파일에서 확인.
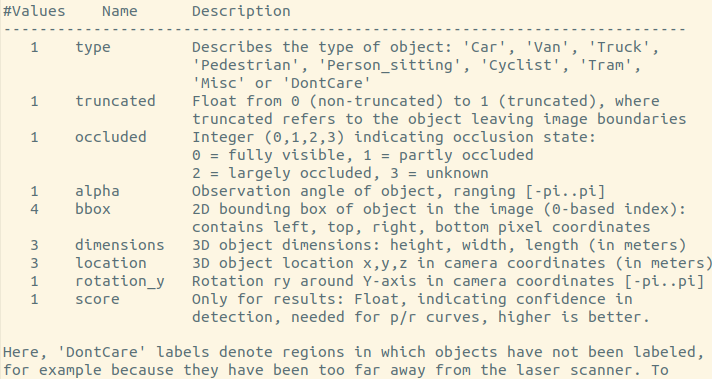
- 실제 labeling data 확인.
2. BDD100K Dataset
- 다양한 도시, 다양한 날씨, 시간을 고려한 자율주행을 위한 데이터셋.
Object Detection Dataset
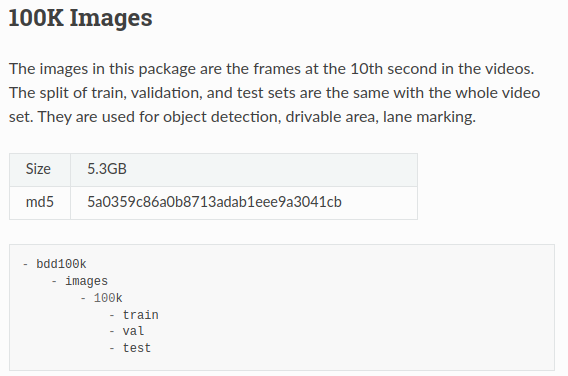
100K Images 다운로드.
Detection 2020 Labels를 다운로드.
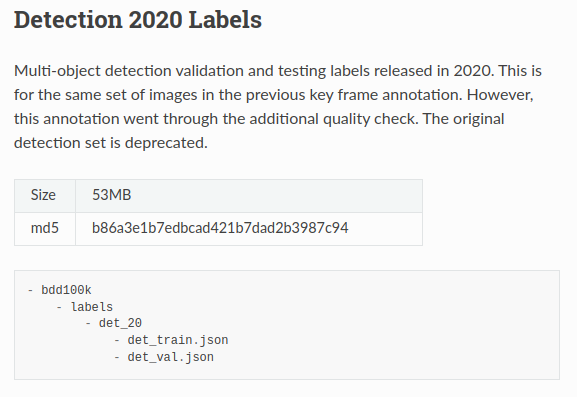
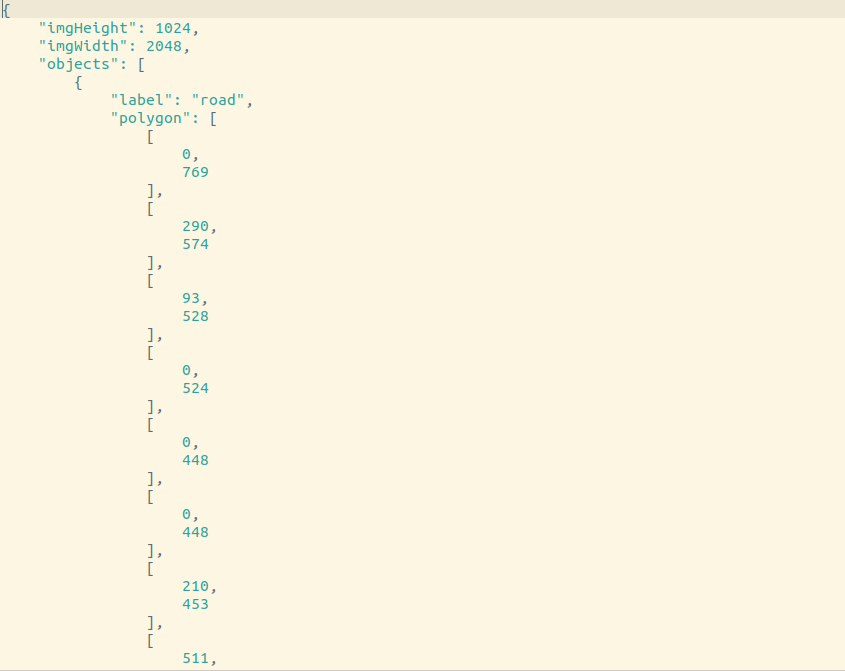
labeling data는 json 파일로 되어있다.
JSON(JavaScript Object Notation)
- {}를 기준으로 블록을 분할.
- "name" : value 형식으로 지정.
- 블록 단위로 들여쓰기.
- []은 배열을 의미.
- ,는 end line을 의미함.
- C++의 경우 rapidjson 라이브러리를 이용해서 파싱.
- python의 경우
import json.
import json
with open('sample.json', 'r', encoding='UTF-8') as json_file:
sample = json.load(json_file)
3. Cityscape Dataset
- segmentation을 위한 dataset
cityscape dataset website
sementic segmentation : 동일 클래스의 개체를 구분하지 않음.
instance segmentation : 동일 클래스의 개체를 구분함.
Segmentation Dataset
gtFine_trainvaltest.zip (241MB) 다운로드.
leftImg8bit_trainvaltest.zip (11GB) 다운로드.
Segmentation Labeling Format
하나의 image에 대해 4개의 labeling data가 존재한다.
-
leftImg8bit
- train
- aachen(도시명)
- aachen_000000_000019_leftImg8bit.png
- aachen(도시명)
- train
-
gtFine
- train
- aachen(도시명)
- aachen_000000_000019_gtFine_color.png
- aachen_000000_000019_gtFine_instanceIds.png
- aachen_000000_000019_gtFine_labelIds.png
- aachen_000000_000019_gtFine_polygons.json
- aachen(도시명)
- train
leftImg8bit.png
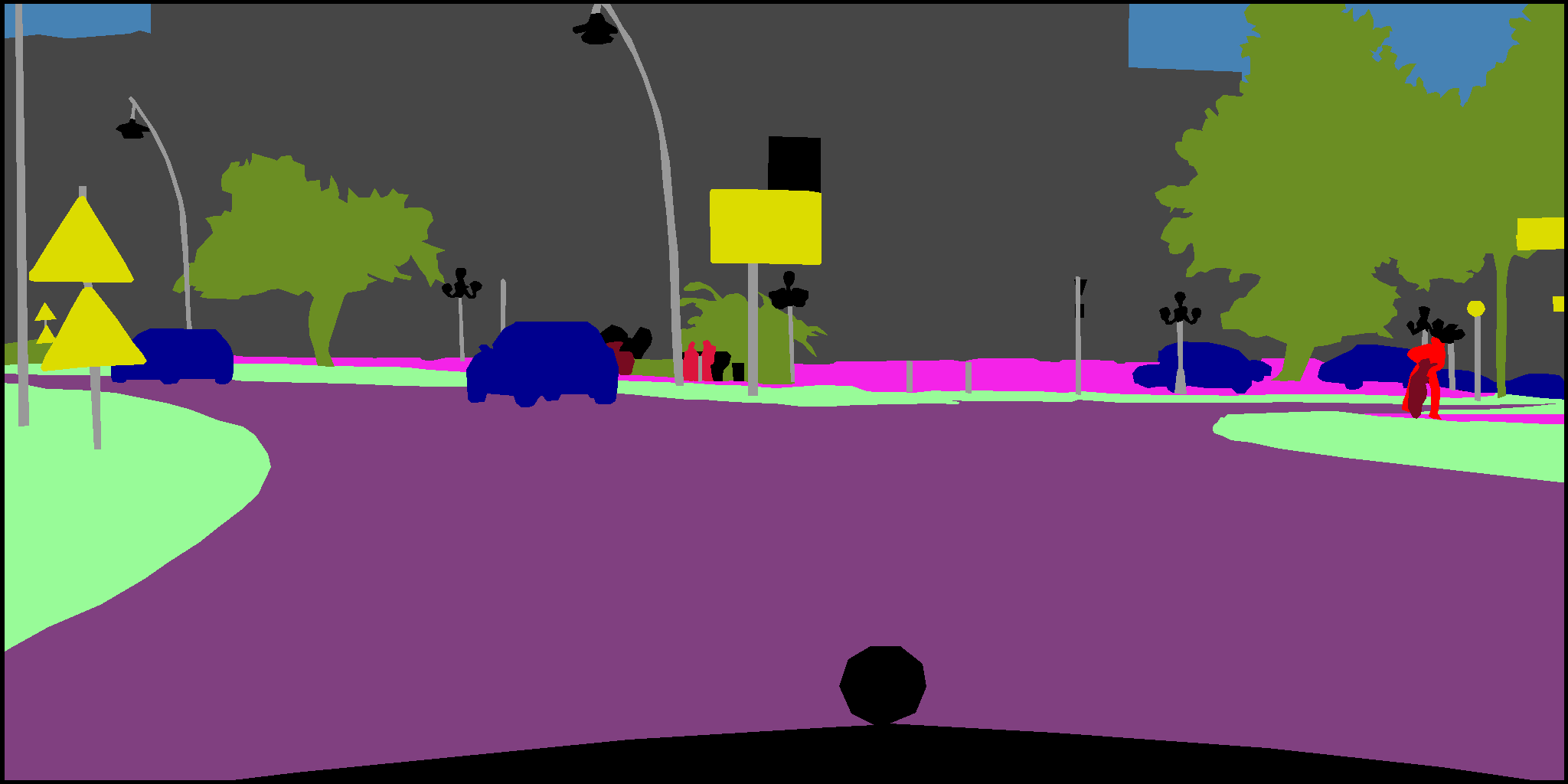
color.png
객체를 클래스별로 고유한 색상으로 표현.
instanceIds.png
각 객체를 개별적인 ID로 구분.
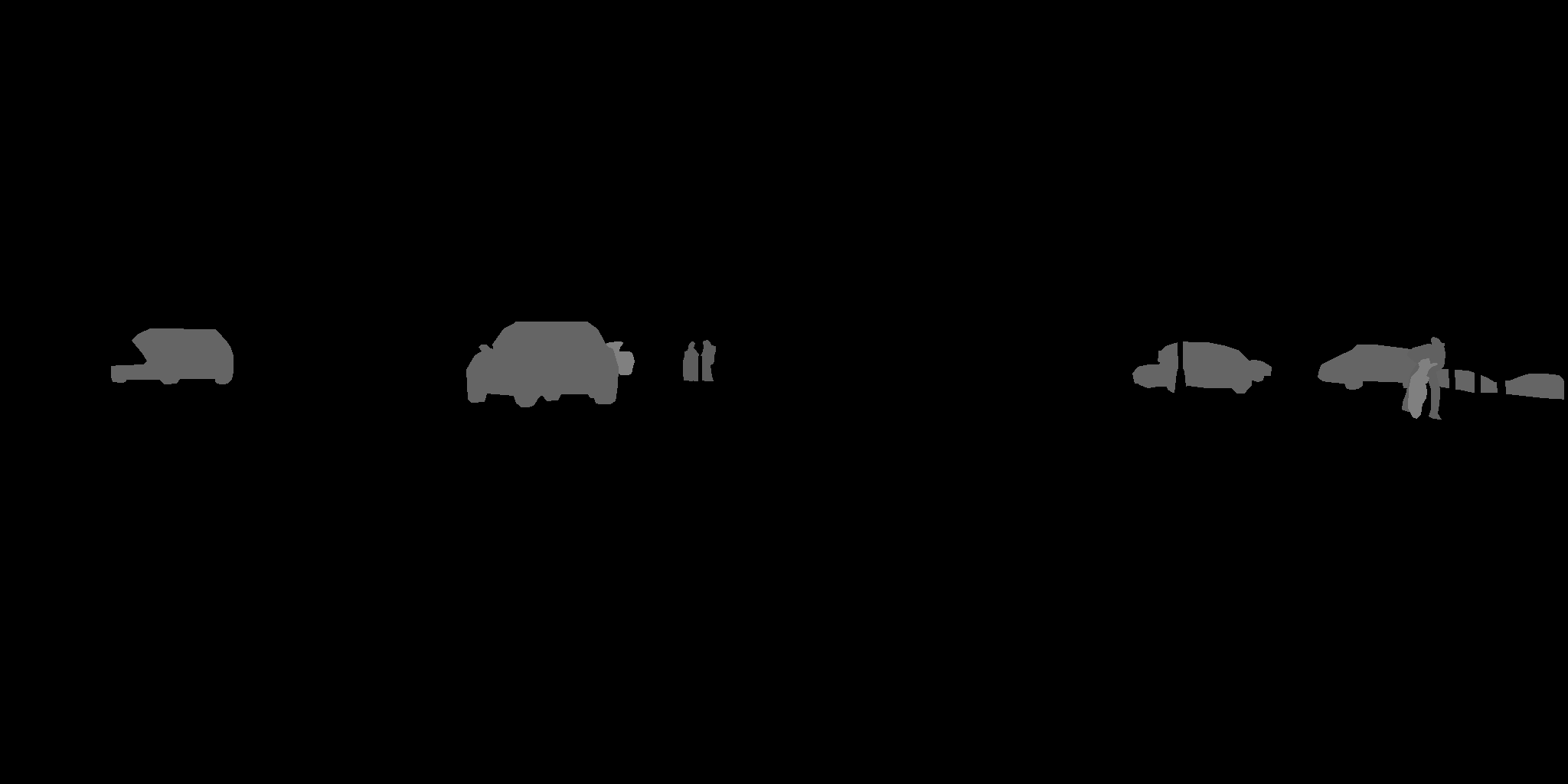
labelIds.png
각 객체를 동일한 클래스로 구분한 이미지.

polygons.json
Segmentation Training
How to find Open datasets
How to find models
