1] SQL - 입양 시각 구하기(2)
문제 설명
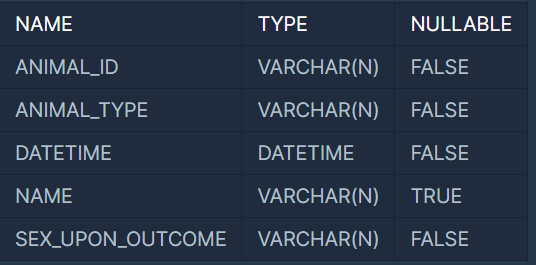
ANIMAL_OUTS 테이블은 동물 보호소에서 입양 보낸 동물의 정보를 담은 테이블입니다. ANIMAL_OUTS 테이블 구조는 다음과 같으며, ANIMAL_ID, ANIMAL_TYPE, DATETIME, NAME, SEX_UPON_OUTCOME는 각각 동물의 아이디, 생물 종, 입양일, 이름, 성별 및 중성화 여부를 나타냅니다.
보호소에서는 몇 시에 입양이 가장 활발하게 일어나는지 알아보려 합니다. 0시부터 23시까지, 각 시간대별로 입양이 몇 건이나 발생했는지 조회하는 SQL문을 작성해주세요. 이때 결과는 시간대 순으로 정렬해야 합니다.
예시
SQL문을 실행하면 다음과 같이 나와야 합니다.

1. 코드작성
- sql도 데이터를 생성할 수 있다(Union all, with recursive 이용)
- 생성한 테이블을 기존 데이터테이블과 결합.
WITH RECURSIVE hours AS (
SELECT 0 AS hour
UNION ALL
SELECT hour + 1 FROM hours WHERE hour < 23
)
SELECT
h.hour AS HOUR,
COUNT(a.ANIMAL_ID) AS COUNT
FROM hours h
LEFT JOIN ANIMAL_OUTS a
ON h.hour = HOUR(a.DATETIME)
GROUP BY h.hour
ORDER BY h.hour;
2] Java 알고리즘 문제 - 공원 산책
문제 설명
지나다니는 길을 'O', 장애물을 'X'로 나타낸 직사각형 격자 모양의 공원에서 로봇 강아지가 산책을 하려합니다. 산책은 로봇 강아지에 미리 입력된 명령에 따라 진행하며, 명령은 다음과 같은 형식으로 주어집니다.
["방향 거리", "방향 거리" … ]
예를 들어 "E 5"는 로봇 강아지가 현재 위치에서 동쪽으로 5칸 이동했다는 의미입니다. 로봇 강아지는 명령을 수행하기 전에 다음 두 가지를 먼저 확인합니다.
주어진 방향으로 이동할 때 공원을 벗어나는지 확인합니다.
주어진 방향으로 이동 중 장애물을 만나는지 확인합니다.
위 두 가지중 어느 하나라도 해당된다면, 로봇 강아지는 해당 명령을 무시하고 다음 명령을 수행합니다.
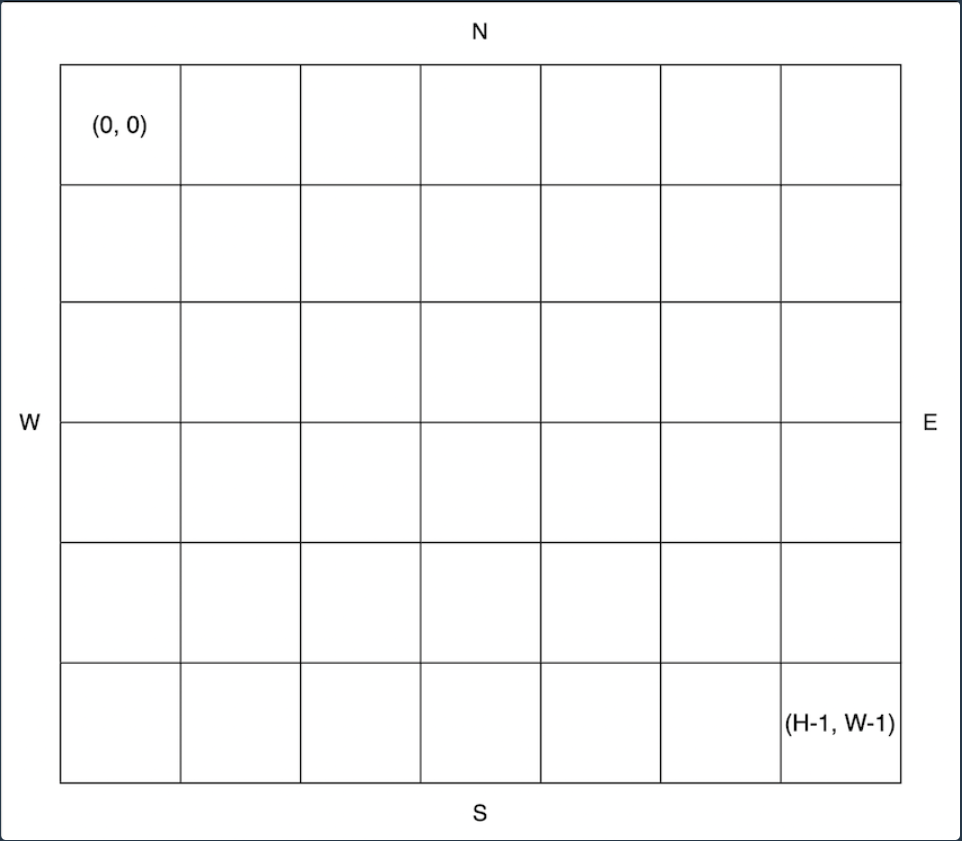
공원의 가로 길이가 W, 세로 길이가 H라고 할 때, 공원의 좌측 상단의 좌표는 (0, 0), 우측 하단의 좌표는 (H - 1, W - 1) 입니다.
공원을 나타내는 문자열 배열 park, 로봇 강아지가 수행할 명령이 담긴 문자열 배열 routes가 매개변수로 주어질 때, 로봇 강아지가 모든 명령을 수행 후 놓인 위치를 [세로 방향 좌표, 가로 방향 좌표] 순으로 배열에 담아 return 하도록 solution 함수를 완성해주세요.
제한사항
입출력 예
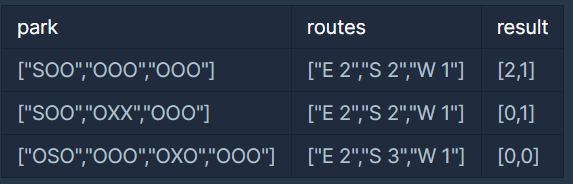
입출력 예 #1
입력된 명령대로 동쪽으로 2칸, 남쪽으로 2칸, 서쪽으로 1칸 이동하면 [0,0] -> [0,2] -> [2,2] -> [2,1]이 됩니다.
입출력 예 #2
입력된 명령대로라면 동쪽으로 2칸, 남쪽으로 2칸, 서쪽으로 1칸 이동해야하지만 남쪽으로 2칸 이동할 때 장애물이 있는 칸을 지나기 때문에 해당 명령을 제외한 명령들만 따릅니다. 결과적으로는 [0,0] -> [0,2] -> [0,1]이 됩니다.
입출력 예 #3
처음 입력된 명령은 공원을 나가게 되고 두 번째로 입력된 명령 또한 장애물을 지나가게 되므로 두 입력은 제외한 세 번째 명령만 따르므로 결과는 다음과 같습니다. [0,1] -> [0,0]
1. 요구사항
- 입력 데이터
-
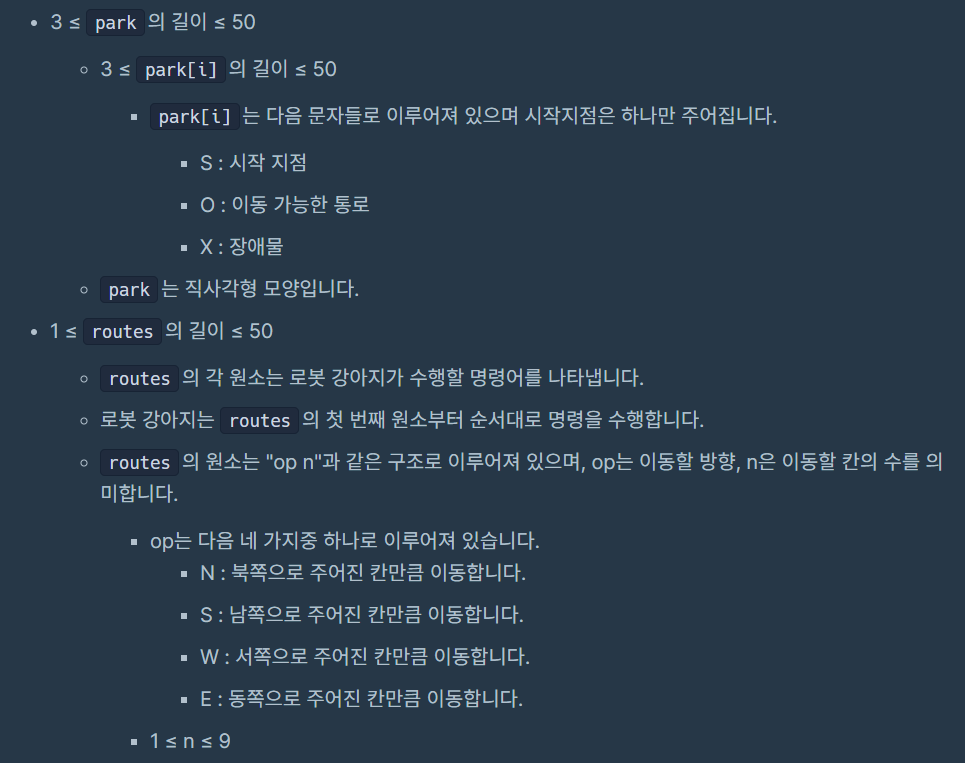
공원(park):
- 문자열 배열로 주어지며, 각 문자열은 공원의 한 행을 나타냅니다.
- 각 문자는 다음 중 하나입니다.
- 'S': 시작 위치 (단 하나 존재)
- 'O': 이동 가능한 통로
- 'X': 장애물
- 공원은 직사각형 모양이며, 가로 길이와 세로 길이를 알 수 있음.
-
경로(routes):
- 문자열 배열로 주어지며, 각 원소는 "방향 거리" 형식입니다.
- 방향: 'N', 'S', 'W', 'E' 중 하나.
- 거리: 1 이상 9 이하의 정수 (이동할 칸 수).
- 동작 방식
- 시작 위치 탐색:
- park 배열에서 시작 위치 'S'를 찾아 초기 위치로 설정한다.
- 명령어 처리:
- 주어진 routes의 각 명령어에 대해 순서대로 처리한다.
- 각 명령어를 파싱하여 이동 방향과 이동할 칸 수를 구한다.
- 이동 전 검증:
- 범위 검사: 이동하는 도중 공원의 경계를 벗어나는지 확인.
- 장애물 검사: 이동 경로 상에 장애물 'X'가 있는지 확인.
- 위 두 가지 조건 중 하나라도 만족하면 해당 명령어는 무시한다.
- 모든 검증을 통과한 경우에만 로봇 강아지의 현재 위치를 업데이트한다.
- 출력
- 모든 명령어를 처리한 후 최종 위치를 [행(세로 좌표), 열(가로 좌표)] 형태의 배열로 반환한다.
2. 플로우차트
┌────────────────────────────┐
│ 시작(Start) │
└────────────────────────────┘
│
▼
┌────────────────────────────┐
│ park, routes 입력 받기 │
└────────────────────────────┘
│
▼
┌────────────────────────────┐
│ 공원의 행 수와 열 수 계산 │
└────────────────────────────┘
│
▼
┌────────────────────────────┐
│ park 배열에서 'S' 위치 탐색 │
└────────────────────────────┘
│
▼
┌────────────────────────────┐
│ 현재 위치를 시작 위치로 설정 │
└────────────────────────────┘
│
▼
┌────────────────────────────┐
│ routes 배열을 순회하며 │
│ 각 명령어 처리(아래 참조) │
└────────────────────────────┘
│
▼
┌────────────────────────────┐
│ 모든 명령어 처리 후 최종 위치 │
│ 반환 (리턴) │
└────────────────────────────┘
│
▼
┌────────────────────────────┐
│ 종료 │
└────────────────────────────┘[각 명령어 처리 세부 플로우]
┌────────────────────────────┐
│ 명령어 "방향 거리" 파싱하기 │
└────────────────────────────┘
│
▼
┌────────────────────────────┐
│ 해당 방향에 대한 │
│ 이동 벡터(Δ행, Δ열) 구하기 │
└────────────────────────────┘
│
▼
┌────────────────────────────┐
│ 임시 위치를 현재 위치로 설정 │
└────────────────────────────┘
│
▼
┌────────────────────────────┐
│ 1부터 거리만큼 반복하면서 │
│ 임시 위치 갱신하기 │
└────────────────────────────┘
│
▼
┌────────────────────────────┐
│ 임시 위치가 범위 내인지, │
│ 장애물 없는지 확인 │
└────────────────────────────┘
│
┌───────┴───────┐
│ │
[문제 있음] [문제 없음]
│ │
▼ ▼
┌─────────────────┐ ┌─────────────────┐
│ 명령어 무시 │ │ 명령어 완료 후 │
│ (현재 위치 유지)│ │ 현재 위치 갱신 │
└─────────────────┘ └─────────────────┘
3. 의사코드
function solution(park, routes):
// 1. 공원의 크기 계산
rows ← park.length
cols ← park[0].length
// 2. 시작 위치 'S' 탐색
for r from 0 to rows - 1:
for c from 0 to cols - 1:
if park[r].charAt(c) == 'S':
startRow ← r
startCol ← c
// 3. 현재 위치 초기화
currentRow ← startRow
currentCol ← startCol
// 4. 방향 벡터 매핑 설정
directionMap ← {
'N': (-1, 0),
'S': (1, 0),
'W': (0, -1),
'E': (0, 1)
}
// 5. routes 배열의 각 명령어 처리
for each route in routes:
// 5-1. 명령어 파싱: 방향과 거리 구하기
split route by space into [dir, distStr]
distance ← integer value of distStr
// 5-2. 해당 방향의 이동 벡터 가져오기
deltaRow, deltaCol ← directionMap[dir]
// 5-3. 임시 위치 변수 초기화
newRow ← currentRow
newCol ← currentCol
validCommand ← true
// 5-4. 주어진 거리만큼 한 칸씩 이동하면서 검증
for i from 1 to distance:
newRow ← newRow + deltaRow
newCol ← newCol + deltaCol
// 범위 검사 및 장애물 확인
if newRow < 0 or newRow ≥ rows or newCol < 0 or newCol ≥ cols or park[newRow].charAt(newCol) == 'X':
validCommand ← false
break out of the loop
// 5-5. 명령어가 유효한 경우에만 현재 위치 업데이트
if validCommand is true:
currentRow ← newRow
currentCol ← newCol
// 6. 최종 위치 반환
return [currentRow, currentCol]
4. 코드작성
public int[] solution(String[] park, String[] routes) {
int rows = park.length;
int cols = park[0].length();
int startRow = 0, startCol = 0;
// 시작 위치 'S' 찾기
for (int r = 0; r < rows; r++) {
for (int c = 0; c < cols; c++) {
if (park[r].charAt(c) == 'S') {
startRow = r;
startCol = c;
break;
}
}
}
// 방향 벡터 설정
Map<Character, int[]> directions = new HashMap<>();
directions.put('N', new int[]{-1, 0});
directions.put('S', new int[]{1, 0});
directions.put('W', new int[]{0, -1});
directions.put('E', new int[]{0, 1});
// 현재 위치 초기화
int curRow = startRow;
int curCol = startCol;
// 명령어 처리
for (String route : routes) {
String[] parts = route.split(" ");
char dir = parts[0].charAt(0);
int dist = Integer.parseInt(parts[1]);
int[] delta = directions.get(dir);
boolean canMove = true;
int newRow = curRow;
int newCol = curCol;
// 주어진 거리만큼 이동할 수 있는지 확인
for (int i = 1; i <= dist; i++) {
newRow += delta[0];
newCol += delta[1];
if (newRow < 0 || newRow >= rows || newCol < 0 || newCol >= cols
|| park[newRow].charAt(newCol) == 'X') {
canMove = false;
break;
}
}
if (canMove) {
curRow = newRow;
curCol = newCol;
}
}
return new int[]{curRow, curCol};
} 5. 원래코드(...)
import java.util.*;
class Solution {
public int[] solution(String[] park, String[] routes) {
int[] answer = {0, 0};
int garo = park[0].length();
int sero = park.length;
int[] map = new int[garo * sero];
for (int i = 0; i < map.length; i++) {
if (park[i / garo].charAt(i % garo) == 'S') {
answer[0] = i / garo;
answer[1] = i % garo;
}
char tempChar = park[i / garo].charAt(i % garo);
map[i] = tempChar == 'S' ? 1 : (tempChar == 'X' ? -1 : 0);
}
char[] direct = new char[routes.length];
int[] distance = new int[routes.length];
for (int i = 0; i < routes.length; i++) {
String[] temp = routes[i].split(" ");
direct[i] = temp[0].charAt(0);
distance[i] = Integer.parseInt(temp[1]);
}
for (int i = 0; i < direct.length; i++) {
int tempInt = distance[i];
int now = answer[0] * garo + answer[1];
int move = 0;
switch (direct[i]) {
case 'N':
if (answer[0] - tempInt < 0) break;
for (int j = 1; j <= tempInt; j++) {
if (map[now - garo * j] < 0) {
move = 0;
break;
}
move--;
}
answer[0] += move;
break;
case 'S':
if (answer[0] + tempInt >= sero) break;
for (int j = 1; j <= tempInt; j++) {
if (map[now + garo * j] < 0) {
move = 0;
break;
}
move++;
}
answer[0] += move;
break;
case 'W':
if (answer[1] - tempInt < 0) break;
for (int j = 1; j <= tempInt; j++) {
if (map[now - j] < 0) {
move = 0;
break;
}
move--;
}
answer[1] += move;
break;
case 'E':
if (answer[1] + tempInt >= garo) break;
for (int j = 1; j <= tempInt; j++) {
if (map[now + j] < 0) {
move = 0;
break;
}
move++;
}
answer[1] += move;
break;
}
}
return answer;
}
}[코드 비교]
1. 자료구조 및 좌표 표현 방식
원본 코드
- 1차원 배열 활용:
- 공원을 1차원 배열
map으로 표현하여i / garo와i % garo를 통해 2차원 좌표로 변환. 'S','X','O'에 대해 각각 1, -1, 0으로 매핑하여 장애물 여부를 숫자로 판단.
- 공원을 1차원 배열
- 장점:
- 1차원 배열로 변환하면 연속적인 메모리 접근이 가능.
- 단점:
- 인덱스 계산이 필요하여 코드 가독성이 떨어지고, 실수할 가능성이 높음.
- 각 방향에 대해 반복되는 switch-case 블록이 존재하여 코드 중복이 많음.
개선 코드
- 2차원 좌표 및 문자열 접근:
- 공원 정보를 2차원(행, 열) 좌표로 처리하여
park[r].charAt(c)로 접근.
- 공원 정보를 2차원(행, 열) 좌표로 처리하여
- 장점:
- 좌표가 직관적이고 코드 가독성이 좋음.
- 'S'나 'X' 등 문자를 직접 비교하여 장애물 여부를 판단하므로 자료의 의미가 명확함.
- 단점:
- 2차원 배열 접근이 약간의 오버헤드를 줄 수 있으나, 문제 크기(최대 50×50)에서는 성능상 큰 문제가 되지 않음.
2. 명령어 처리 및 이동 로직
원본 코드
- switch-case를 통한 방향별 처리:
- 각 방향(
'N','S','W','E')마다 별도의 switch-case 분기를 사용하여 처리. - 각 케이스 내에서 이동 가능 여부를 검사하고, 문제가 발생하면 바로 break로 명령어 전체를 무시.
- 각 방향(
- 장점:
- 각 방향에 대해 명시적으로 처리 로직을 작성하여, 방향별 세부 로직을 한 눈에 볼 수 있음.
- 단점:
- 각 방향별로 거의 동일한 로직(한 칸씩 이동하며 검사)을 반복하여 코드 중복이 많음.
- 인덱스 계산(예,
now - garo * j,now + j등) 때문에 디버깅이나 유지보수가 어려워질 수 있음.
개선 코드
- 방향 벡터와 공통 루프 사용:
Map<Character, int[]>를 활용하여 각 방향에 대한 (행, 열) 변화량을 저장.- 하나의 공통 루프에서 주어진 거리만큼 한 칸씩 이동하면서 범위와 장애물을 동시에 체크.
- 장점:
- 중복 코드를 제거하고, 모든 방향에 대해 동일한 로직을 재사용하므로 유지보수가 쉬움.
- 방향 벡터를 사용하면 새로운 방향이 추가되거나 로직 수정 시 간단히 수정 가능.
- 단점:
- 별도의 자료구조(
Map)를 사용함으로써 약간의 초기 설정 코드가 추가되지만, 전체 코드 길이와 가독성 측면에서는 유리함.
- 별도의 자료구조(
3. 경로 검증 로직
원본 코드
- 각 방향마다 이동 전 경계 검사와 장애물 검사를 수행.
- 한 방향에 대해 이동할 때마다 1차원 배열 인덱스로 계산하여 체크하므로, 실수로 인덱스 계산을 잘못할 위험이 있음.
개선 코드
- 명령어별 시뮬레이션:
- 각 명령어에 대해 한 칸씩 이동하면서 즉시 범위 및 장애물 여부를 확인.
- 문제가 발생하면 해당 명령어 전체를 무효화하고, 문제가 없을 경우에만 최종 위치를 업데이트.
- 장점:
- 전체 이동 경로를 한 번에 시뮬레이션하므로, 중간에 문제가 생기면 바로 종료할 수 있음.
- 직관적이고 디버깅하기 쉬운 구조.
종합 비교 및 결론
| 비교 항목 | 원본 코드 | 개선 코드 |
|---|---|---|
| 가독성 | 1차원 배열과 switch-case 사용으로 복잡 | 2차원 좌표 및 방향 벡터로 직관적 |
| 유지보수성 | 중복 코드가 많아 수정 어려움 | 공통 로직을 사용하여 유지보수 용이 |
| 성능 | 문제 크기 내에서는 성능 차이 없음 | 문제 크기 내에서 성능 문제 없음 |
| 코드 중복 | 각 방향별로 동일한 로직 반복 | 방향 벡터 활용으로 중복 제거 |
결론
- 원본 코드는 요구사항을 충족하지만, 1차원 배열과 switch-case 구조 때문에 코드가 다소 복잡하고 유지보수가 어려움.
- 개선 코드는 2차원 좌표 및 방향 벡터를 활용하여 더 직관적이고 간결한 구조를 가지며, 향후 코드 수정이나 확장이 필요할 때 유리함.
- 유지보수성과 가독성을 고려할 때 개선된 접근 방식이 더 좋은 선택으로 평가 가능.
- 레코드클래스 추천! (절대불변, 필드를 get 안써도 .만 붙여도 가져올 수 있음.)
- 웹 페이지 모바일 슬라이스 (offset 단점)
- 유틸 클래스를 만들자!
- page와 size는 Pageable 객체로 한방에 받아올 수 있음.
- 비즈니스로직이 아니면 컨트롤러도 갠차늠
- 근거만 있으면 일단 ok
