CameraCalibration
1.Camera model
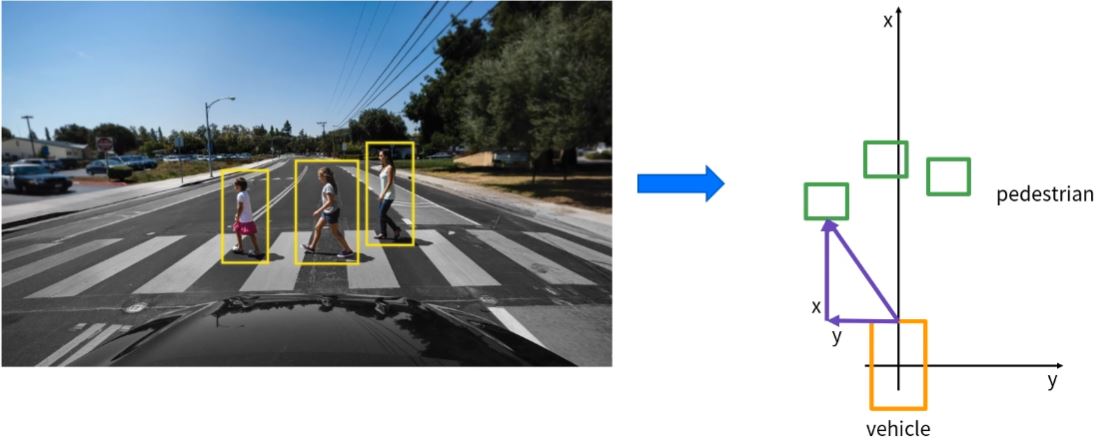
자율주행에서 Perception은 주행 환경을 인지(인식+이해)하는 과정으로, 유의미한 정보를 생성하는 단계가 필요하다.Vision의 경우, 이미지 영역에서 객체를 인식하는 것이 아닌 객체와 차량의 관계를 파악하는 것이 중요하다.3D POSE Estimation의 기본
2023년 2월 2일
2.Extrinsic Calibration
카메라의 고유한 특성인 Intrinsic Calibration의 의미와 방법을 학습했다.chessboard를 이용하여 카메라의 focal length, principle point, distortion 계수를 구하는 방법과 활용하는 방법을 배웠다.목표: Extrinsi
2023년 2월 7일