Character Movement Component In-Depth 강의 시리즈를 공부하면서 한글로 정리한 포스트입니다. 의역과 오역이 난무하니 주의해주세요! https://youtu.be/j45CUV9lWTA?si=nsePEHZSnSmg8hMK
Prone Implementation
UENUM(BlueprintType)
enum ECustomMovementMode
{
CMOVE_None UMETA(Hidden),
CMOVE_Slide UMETA(DisplayName = "Slide"),
CMOVE_Prone UMETA(DisplayName = "Prone"),
CMOVE_MAX UMETA(Hidden),
};새로운 Custom Movement Mode를 추가해주고,
/// Prone
UPROPERTY(EditDefaultsOnly) float ProneEnterHoldDuration = .2f;
UPROPERTY(EditDefaultsOnly) float ProneSlideEnterImpulse = 300.f;
UPROPERTY(EditDefaultsOnly) float MaxProneSpeed = 300.f;
UPROPERTY(EditDefaultsOnly) float BrakingDecelerationProning = 2500.f;
// Prone
private:
void EnterProne(EMovementMode PrevMode, ECustomMovementMode PrevCustomMode);
void ExitProne();
bool CanProne() const;
void PhysProne(float deltaTime, int32 Iterations);Prone과 관련된 변수와 함수를 선언해주자.
PhysProne()
전체 구현부는 저자의 깃허브에서 확인하실 수 있습니다!
https://github.com/delgoodie/Zippy
PhysProne 의 경우, PhysWalking 의 코드와 굉장히 유사하게 구현했다. Walking과 Prone은 기본적으로 이동 속도의 변화일 뿐이고, 동작 자체가 매우 유사하다. 이번 튜토리얼에서는 서브 스테핑이 어떻게 작동하는지에 중점을 둘 예정이다.
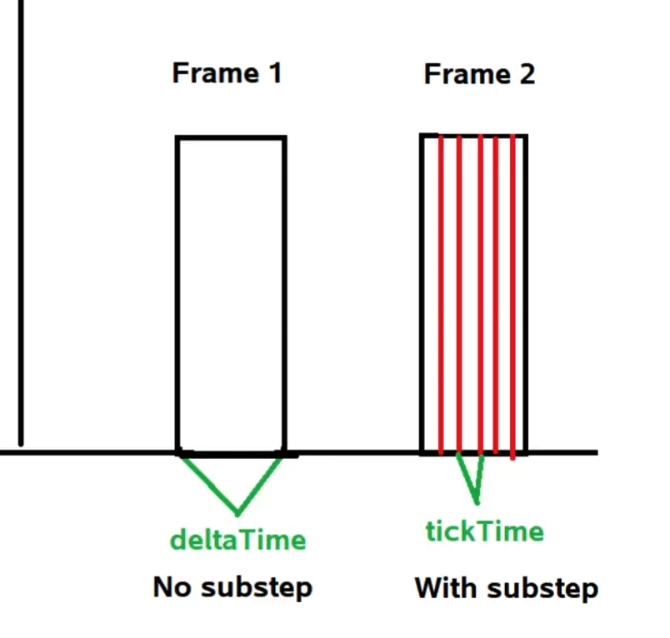
우리는 서브 스테핑을 할 것이며, 서브 스테핑이 의미하는 것은 한 프레임에서 여러번 반복하는 것이다. 따라서 프레임이 주어지고, 프레임은 특정 델타 타임으로 구성되어 있다. 한 프레임 안에서 여러번 반복하며, 더 정확하고 움직임에 대해 더 높은 해상도의 시뮬레이션을 할 수 있다.
float remainingTime = deltaTime;while문에 들어가기 전, remainingTime에 deltaTime을 넣어준다.
while ((remainingTime >= MIN_TICK_TIME) &&
(Iterations < MaxSimulationIterations) &&
CharacterOwner && (CharacterOwner->Controller || bRunPhysicsWithNoController || (CharacterOwner->GetLocalRole() == ROLE_SimulatedProxy)))서브 스테핑에 들어가기 위한 조건문이다. 최소 틱 시간보다 남은 시간이 더 많은지 확인하고, 반복이 최대 시뮬레이션 반복보다 적을때(무한 루프에 들어가는 것을 방지하기 위함), 그리고 밑의 조건들을 만족할 때 서브 스테핑을 실행한다.
Iterations++;
bJustTeleported = false;
const float timeTick = GetSimulationTimeStep(remainingTime, Iterations);
remainingTime -= timeTick;텔레포트를 사용하지 않기 때문에 bJustTeleported 를 false로 설정하고, GetSimulationTimeStep 함수를 이용해 틱 시간을 얻는다.
// Save current values
UPrimitiveComponent * const OldBase = GetMovementBase();
const FVector PreviousBaseLocation = (OldBase != NULL) ? OldBase->GetComponentLocation() : FVector::ZeroVector;
const FVector OldLocation = UpdatedComponent->GetComponentLocation();
const FFindFloorResult OldFloor = CurrentFloor;모든 현재 값에 대해 저장된 값을 만들어준다. 이렇게 하는 이유는, 방금 계산한 이동을 되돌려야 할 수도 있기 때문이다.
// Ensure velocity is horizontal.
MaintainHorizontalGroundVelocity();
const FVector OldVelocity = Velocity;
Acceleration.Z = 0.f;
// Apply acceleration
CalcVelocity(timeTick, GroundFriction, false, GetMaxBrakingDeceleration());MaintainHorizontalGroundVelocity 는 속도를 수평으로 유지하는 데 매우 유용한 함수이다. 우리는 지면에 있을 수도 있고, 경사면에 있을 수도, 평평하지 않은 평면에 있을 수도 있지만 속도는 평면에 수평으로 유지된다. 주로 지상 이동 모드에서 도움이 되는 함수이다. Acceleration 은 입력 벡터라는 것을 잊지 말자. 아무튼, Z값을 0으로 변경하여 위 또는 아래로 가속할 수 없게 한다.
마찰은 항상 캡슐에 적용되므로, 캡슐이 움직일 때 마찰이 가해지며 속도가 느려진다. 그렇기 때문에 무한히 가속할 수 없다. 우리는 캐릭터가 걸어다니다가 키를 놓았을 때 곧바로 멈추기를 원한다. 하지만, 이것을 위해 마찰을 높이게 되면 캐릭터의 이동속도가 정말 느려질 것이고, 슬라이드와 같은 이동 모드가 제대로 구현되지 않을 수 있다. 따라서 존재하는 것이 BrakingDeceleration 인데, 이것은 키를 놓았을때와 같이 어떤 움직임도 적용하지 않을 때 적용되는 값이다. 이 값을 이용해 빠르게 멈출 수 있다.
커스텀 무브먼트 모드의 경우 GetMaxBrakingDeceleration() 함수를 사용하면 0을 반환하므로, 함수를 오버라이드 하여 해당 이동 모드의 감속도를 반환해주어야 한다.
// Compute move parameters
const FVector MoveVelocity = Velocity;
const FVector Delta = timeTick * MoveVelocity; // dx = v * dt
const bool bZeroDelta = Delta.IsNearlyZero();
FStepDownResult StepDownResult;
if ( bZeroDelta )
{
remainingTime = 0.f;
}
else
{
MoveAlongFloor(MoveVelocity, timeTick, &StepDownResult);
if ( IsFalling() )
{
// pawn decided to jump up
const float DesiredDist = Delta.Size();
if (DesiredDist > KINDA_SMALL_NUMBER)
{
const float ActualDist = (UpdatedComponent->GetComponentLocation() - OldLocation).Size2D();
remainingTime += timeTick * (1.f - FMath::Min(1.f,ActualDist/DesiredDist));
}
StartNewPhysics(remainingTime,Iterations);
return;
}
else if ( IsSwimming() ) //just entered water
{
StartSwimming(OldLocation, OldVelocity, timeTick, remainingTime, Iterations);
return;
}
}만약 속도가 0이면 캡슐이 어디로도 움직이지 않으므로 서브스테핑이 필요하지 않게된다. 따라서 시뮬레이션을 서두르기 위해 남은 시간을 즉시 0으로 설정한다.
속도가 0이 아니라면, MoveAlongFloor 함수를 이용해 바닥을 따라 이동한다. 이 함수 또한 매우 유용한 헬퍼 함수인데, 이 함수는 컴포넌트를 안전하게 움직여준다. 이름에서 알 수 있듯 바닥을 따라 움직이며, 이것은 정말 도움이 된다. 다양한 각도의 경사면에서 움직일 수 있고, 각각의 속도와 시간 틱을 가질 수 있으며, StepDownResult 이라는 결과값이 반환되기 때문이다. 현재 있는 표면과 이동중인 표면을 아는 것은 정말 중요하다. 캡슐이 계단과 같은 표면에서 움직인다고 상상해보자. 그 표면은 항상 변하기 때문에, 우리는 그에 따라 처리해주어야 한다. StepDownResult를 통해 변화된 표면을 알 수 있다.
이 줄 자체가 실제로 움직임이 일어나는 곳이며, 나머지는 움직임을 정리하는 코드들이다. 첫번째는 움직이다가 떨어졌을 때의 경우이다. 움직이고 있다가 바닥이 없는 곳으로 떨어지면, 우리는 기본적으로 falling 모드에 들어가게 될 것이다. 여기서 볼 수 있는 멋진 것 중 하나는, 남은 시간과 반복을 사용하여 StartNewPhysics 를 실행한다는 것이다. 새로운 물리 시뮬레이션을 전체 델타 타임이 아니라 우리가 가지고 있는 남은 델타 타임을 사용하여 시뮬레이션 중간에 이동 모드를 전환할 수 있게 된다. StartSwimming 의 경우에도, 같은 경우를 설정한다. 이러한 코드들을 사용해, 걷다가 다른 이동 모드로 전환되는 경우를 처리할 수 있게 된다.
// Update floor.
// StepUp might have already done it for us.
if (StepDownResult.bComputedFloor)
{
CurrentFloor = StepDownResult.FloorResult;
}
else
{
FindFloor(UpdatedComponent->GetComponentLocation(), CurrentFloor, bZeroDelta, NULL);
}StepDownResult.bComputedFloor 가 true라면, 캐릭터가 아래로 이동할 때 이미 바닥 정보를 계산했다는 뜻이므로 CurrentFloor 에 현재 바닥 정보를 대입해주고,
false 라면 새로운 바닥 정보를 계산한다.
// check for ledges here
const bool bCheckLedges = !CanWalkOffLedges();
if ( bCheckLedges && !CurrentFloor.IsWalkableFloor() )
{
// calculate possible alternate movement
const FVector GravDir = FVector(0.f,0.f,-1.f);
const FVector NewDelta = bTriedLedgeMove ? FVector::ZeroVector : GetLedgeMove(OldLocation, Delta, GravDir);
if ( !NewDelta.IsZero() )
{
// first revert this move
RevertMove(OldLocation, OldBase, PreviousBaseLocation, OldFloor, false);
// avoid repeated ledge moves if the first one fails
bTriedLedgeMove = true;
// Try new movement direction
Velocity = NewDelta/timeTick; // v = dx/dt
remainingTime += timeTick;
continue;
}
else
{
// see if it is OK to jump
// @todo collision : only thing that can be problem is that oldbase has world collision on
bool bMustJump = bZeroDelta || (OldBase == NULL || (!OldBase->IsQueryCollisionEnabled() && MovementBaseUtility::IsDynamicBase(OldBase)));
if ( (bMustJump || !bCheckedFall) && CheckFall(OldFloor, CurrentFloor.HitResult, Delta, OldLocation, remainingTime, timeTick, Iterations, bMustJump) )
{
return;
}
bCheckedFall = true;
// revert this move
RevertMove(OldLocation, OldBase, PreviousBaseLocation, OldFloor, true);
remainingTime = 0.f;
break;
}
}
else
{
// Validate the floor check
if (CurrentFloor.IsWalkableFloor())
{
AdjustFloorHeight();
SetBase(CurrentFloor.HitResult.Component.Get(), CurrentFloor.HitResult.BoneName);
}
else if (CurrentFloor.HitResult.bStartPenetrating && remainingTime <= 0.f)
{
// The floor check failed because it started in penetration
// We do not want to try to move downward because the downward sweep failed, rather we'd like to try to pop out of the floor.
FHitResult Hit(CurrentFloor.HitResult);
Hit.TraceEnd = Hit.TraceStart + FVector(0.f, 0.f, MAX_FLOOR_DIST);
const FVector RequestedAdjustment = GetPenetrationAdjustment(Hit);
ResolvePenetration(RequestedAdjustment, Hit, UpdatedComponent->GetComponentQuat());
bForceNextFloorCheck = true;
}
// check if just entered water
if ( IsSwimming() )
{
StartSwimming(OldLocation, Velocity, timeTick, remainingTime, Iterations);
return;
}
// See if we need to start falling.
if (!CurrentFloor.IsWalkableFloor() && !CurrentFloor.HitResult.bStartPenetrating)
{
const bool bMustJump = bJustTeleported || bZeroDelta || (OldBase == NULL || (!OldBase->IsQueryCollisionEnabled() && MovementBaseUtility::IsDynamicBase(OldBase)));
if ((bMustJump || !bCheckedFall) && CheckFall(OldFloor, CurrentFloor.HitResult, Delta, OldLocation, remainingTime, timeTick, Iterations, bMustJump) )
{
return;
}
bCheckedFall = true;
}
}
[*TODO] 32:41 - 42:02 Ledges와 관련된 구현 로직은 추후에 정리하겠습니다 :)
여기서 가장 중요한 부분은 서브 스테핑이다. 더 작은 델타 타임으로 반복을 수행하면 더 정확한 시뮬레이션을 얻을 수 있다는 것을 기억하자.
CanProne()
bool UNyongMovementComponent::CanProne() const
{
return IsCustomMovementMode(CMOVE_Slide) || IsMovementMode(MOVE_Walking) && IsCrouching();
}슬라이드하고 있거나, 웅크리고 있을 때 Prone 모드에 들어갈 수 있다.
EnterProne()
void UNyongMovementComponent::EnterProne(EMovementMode PrevMode, ECustomMovementMode PrevCustomMode)
{
bWantsToCrouch = true;
if (PrevMode == MOVE_Custom && PrevCustomMode == CMOVE_Slide)
{
Velocity += Velocity.GetSafeNormal2D() * ProneSlideEnterImpulse;
}
FindFloor(UpdatedComponent->GetComponentLocation(), CurrentFloor, true, NULL);
}여기서 FindFloor 를 호출하는 이유는 Enter 함수 이후에 MoveAlongFloor 함수가 바로 호출되기 때문이다. MoveAlongFloor 의 가장 첫 줄을 보면, 현재 바닥이 걸을 수 있는지의 여부를 확인하고 그렇지 않다면 return 해버린다. 만약 갱신하지 않고 무브먼트 모드를 변경한다면, 첫번째 서브 스테핑 단계에서 이동이 실패하고 바닥이 갱신되므로, 첫번째 서브스테핑을 성공시키기 위해 함수를 호출한 것이다.
Link
bool UNyongMovementComponent::IsMovingOnGround() const
{
return Super::IsMovingOnGround() || IsCustomMovementMode(CMOVE_Slide) || IsCustomMovementMode(CMOVE_Prone);
}Prone도 지상에서 움직이는 이동 모드이므로, IsMovingOnGround() 함수에 추가해준다.
void UNyongMovementComponent::PhysCustom(float deltaTime, int32 Iterations)
{
Super::PhysCustom(deltaTime, deltaTime);
switch (CustomMovementMode)
{
case CMOVE_Slide:
PhysSlide(deltaTime, Iterations);
break;
case CMOVE_Prone:
PhysProne(deltaTime, Iterations);
break;
default:
UE_LOG(LogTemp, Fatal, TEXT("Invalid Movement Mode"));
}
}PhysCustom 함수에 PhysProne 을 호출해주는 케이스문을 추가해준다.
virtual void OnMovementModeChanged(EMovementMode PreviousMovementMode, uint8 PreviousCustomMode) override;void UNyongMovementComponent::OnMovementModeChanged(EMovementMode PreviousMovementMode, uint8 PreviousCustomMode)
{
Super::OnMovementModeChanged(PreviousMovementMode, PreviousCustomMode);
if (PreviousMovementMode == MOVE_Custom && PreviousCustomMode == CMOVE_Slide) ExitSlide();
if (PreviousMovementMode == MOVE_Custom && PreviousCustomMode == CMOVE_Prone) ExitProne();
if (IsCustomMovementMode(CMOVE_Slide)) EnterSlide(PreviousMovementMode, (ECustomMovementMode)PreviousCustomMode);
if (IsCustomMovementMode(CMOVE_Prone)) EnterProne(PreviousMovementMode, (ECustomMovementMode)PreviousCustomMode);
}OnMovementModeChanged 함수를 오버라이드하고 구현해준다. 이부분은 강의 이후 수정된 내용이므로, 뒷부분에서 설명한다.
virtual float GetMaxSpeed() const override;
virtual float GetMaxBrakingDeceleration() const override;float UNyongMovementComponent::GetMaxSpeed() const
{
if (IsMovementMode(MOVE_Walking) && Safe_bWantsToSprint && !IsCrouching()) return MaxSprintSpeed;
if (MovementMode != MOVE_Custom) return Super::GetMaxSpeed();
switch (CustomMovementMode)
{
case CMOVE_Slide:
return MaxSlideSpeed;
case CMOVE_Prone:
return MaxProneSpeed;
default:
UE_LOG(LogTemp, Fatal, TEXT("Invalid Movement Mode"))
return -1.f;
}
}
float UNyongMovementComponent::GetMaxBrakingDeceleration() const
{
if (MovementMode != MOVE_Custom) return Super::GetMaxBrakingDeceleration();
switch (CustomMovementMode)
{
case CMOVE_Slide:
return BrakingDecelerationSliding;
case CMOVE_Prone:
return BrakingDecelerationProning;
default:
UE_LOG(LogTemp, Fatal, TEXT("Invalid Movement Mode"))
return -1.f;
}
}두 개의 함수를 오버라이드 해주자.
Trigger
이전 강의에서는 compressed flag를 사용했지만, prone의 경우는 sprint와 다르게 일회성 이벤트이기 때문에 prone을 하고 있는지 여부를 서버에 매 프레임마다 알릴 필요가 없기 때문에 사용할 필요가 없다. 이번 강의에서는 RPC를 이용해 트리거할 예정이다.
uint8 Saved_bWantsToProne : 1;
bool Safe_bWantsToProne;커스텀 SavedMove 구조체에 Saved 변수를 선언해주고, 무브먼트 컴포넌트 안에 Safe 변수를 선언해주자.
void UNyongMovementComponent::FSavedMove_Nyong::SetMoveFor(ACharacter* C, float InDeltaTime, FVector const& NewAccel, FNetworkPredictionData_Client_Character& ClientData)
{
FSavedMove_Character::SetMoveFor(C, InDeltaTime, NewAccel, ClientData);
UNyongMovementComponent* CharacterMovement = Cast<UNyongMovementComponent>(C->GetCharacterMovement());
Saved_bWantsToSprints = CharacterMovement->Safe_bWantsToSprint;
Saved_bPrevWantsToCrouch = CharacterMovement->Safe_bPrevWantsToCrouch;
Saved_bWantsToProne = CharacterMovement->Safe_bWantsToProne;
}
void UNyongMovementComponent::FSavedMove_Nyong::PrepMoveFor(ACharacter* C)
{
Super::PrepMoveFor(C);
UNyongMovementComponent* CharacterMovement = Cast<UNyongMovementComponent>(C->GetCharacterMovement());
CharacterMovement->Safe_bWantsToSprint = Saved_bWantsToSprints;
CharacterMovement->Safe_bPrevWantsToCrouch = Saved_bPrevWantsToCrouch;
CharacterMovement->Safe_bWantsToProne = Saved_bWantsToProne;
}SetMoveFor, PrepMoveFor 함수를 구현해주고,
void TryEnterProne() { Safe_bWantsToProne = true; }
UFUNCTION(Server, Reliable) void Server_EnterProne();
void UNyongMovementComponent::Server_EnterProne()
{
Safe_bWantsToProne = true;
}두 함수를 선언 및 구현해준다. 두 함수 모두 Safe_bWantsToProne 변수를 true 처리하는 것 뿐이라는걸 알 수 있다.
Server RPC의 경우, 호출될 때 항상 현재 프레임 movement RPC가 도착하기 전에 도착한다. 따라서 이런 RPC가 호출될 때, 서버의 프레임이 클라이언트의 프레임보다 항상 먼저 실행될 수 있다.
클라이언트가 프레임 100에서 움직임 관련 작업을 수행하고 RPC를 서버에 보내면, 서버는 클라이언트가 보낸 RPC를 처리한 후 프레임 100을 실행한다. 따라서 서버는 프레임을 실행하기 전에 클라이언트가 보낸 움직임 정보로 상태 변수를 미리 업데이트하는 것이 중요하다.
FTimerHandle TimerHandle_EnterProne;void UNyongMovementComponent::CrouchPressed()
{
bWantsToCrouch = ~bWantsToCrouch;
GetWorld()->GetTimerManager().SetTimer(TimerHandle_EnterProne, this, &UNyongMovementComponent::TryEnterProne, ProneEnterHoldDuration);
}
void UNyongMovementComponent::CrouchReleased()
{
GetWorld()->GetTimerManager().ClearTimer(TimerHandle_EnterProne);
}특정 시간 동안 C키를 누른 후 prone을 시작하므로, 타이머 핸들이 필요하다. 타이머 핸들은 서버와 클라이언트에서 다른 속도로 실행되기 때문에 movement safe하지 않다. 하지만 클라이언트만이 Enter Prone을 호출할 것이기 때문에 괜찮다. 클라이언트만이 C키를 실제로 누르고 뗀걸 알 수 있기 때문이다.
void UNyongMovementComponent::UpdateCharacterStateBeforeMovement(float DeltaSeconds)
{
// 생략
if (Safe_bWantsToProne)
{
if (CanProne())
{
SetMovementMode(MOVE_Custom, CMOVE_Prone);
if(!CharacterOwner->HasAuthority()) Server_EnterProne();
}
Safe_bWantsToProne = false;
}
if (IsCustomMovementMode(CMOVE_Prone) && !bWantsToCrouch)
{
SetMovementMode(MOVE_Walking);
}
Super::UpdateCharacterStateBeforeMovement(DeltaSeconds);
}Prone으로 들어갈 때, 서버가 아닌 경우 Server RPC를 호출한다.
Amendments
Sprint
void UNyongMovementComponent::OnMovementUpdated(float DeltaSeconds, const FVector& OldLocation, const FVector& OldVelocity)
{
Super::OnMovementUpdated(DeltaSeconds, OldLocation, OldVelocity);
if (MovementMode == MOVE_Walking)
{
if (Safe_bWantsToSprint)
{
MaxWalkSpeed = Sprint_MaxWalkSpeed;
}
else
{
MaxWalkSpeed = Walk_MaxWalkSpeed;
}
}
Safe_bPrevWantsToCrouch = bWantsToCrouch;
}원래는 OnMovementUpdated 함수 내에서 Max Walk Speed를 변경하고 있었다. 이부분을 지우고,
float UNyongMovementComponent::GetMaxSpeed() const
{
if (IsMovementMode(MOVE_Walking) && Safe_bWantsToSprint && !IsCrouching()) return MaxSprintSpeed;
// 생략
}이 코드를 작성해준다. 무브먼트 모드가 Walking이고, Sprint를 원하고, Crouch 상태가 아니라면 MaxSprintSpeed 를 반환해주자. 만약 Safe_bWantsToSprint 상태가 아니라면 Super 함수에서 MaxWalkSpeed를 반환할 것이다. 동일한 이동 모드이지만 다른 최대 속도를 갖을 뿐이기 때문에, 좀 더 깔끔하게 구현할 수 있다.
Slide
먼저 슬라이드 구현 로직이 일부 변경 및 추가되었다. 자세한 코드는 깃허브를 참고하자.
void UNyongMovementComponent::EnterSlide()
{
UE_LOG(LogTemp, Warning, TEXT("Enter Slide"));
bWantsToCrouch = true;
Velocity += Velocity.GetSafeNormal2D() * Slide_EnterImpulse;
SetMovementMode(MOVE_Custom, CMOVE_Slide);
}원래 EnterSlide() 함수 내에서 무브먼트 모드가 변경됐지만, 이제는 OnMovementModeChanged() 함수에서 변경된다.
void UNyongMovementComponent::OnMovementModeChanged(EMovementMode PreviousMovementMode, uint8 PreviousCustomMode)
{
Super::OnMovementModeChanged(PreviousMovementMode, PreviousCustomMode);
if (PreviousMovementMode == MOVE_Custom && PreviousCustomMode == CMOVE_Slide) ExitSlide();
if (PreviousMovementMode == MOVE_Custom && PreviousCustomMode == CMOVE_Prone) ExitProne();
if (IsCustomMovementMode(CMOVE_Slide)) EnterSlide(PreviousMovementMode, (ECustomMovementMode)PreviousCustomMode);
if (IsCustomMovementMode(CMOVE_Prone)) EnterProne(PreviousMovementMode, (ECustomMovementMode)PreviousCustomMode);
}이 방법으로 구현하면, 이미 기본 함수인 Set Movement Mode 함수만 호출하면 된다. 따로 EnterSlide 함수를 호출할 필요가 없다. 이유는 두 가지가 있는데, 하나는 우선 깔끔하다. 블루프린트에서 Set Movement mode를 호출할 때 Enter 과 Exit 함수가 자동으로 호출되므로, 두 함수를 블루프린트에 노출하지 않아도 자동으로 불러질 것이다. 두번째로, 슬라이드를 종료하고 falling 모드나 Walking, Swimming 모드에 들어갈 수도 있으므로 Exit Slide 함수가 Movement Mode를 설정하는 것을 원하지 않기 때문이다.
enum CompressedFlags
{
FLAG_Sprint = 0x10,
FLAG_Custom_1 = 0x20,
FLAG_Custom_2 = 0x40,
FLAG_Custom_3 = 0x80,
};커스텀 Saved Move 구조체 안에 CompressedFlags 만들어 커스텀 플래그를 만들어주었다. 기존 커스텀 플래그와 값이 같다는 것에 주의하자.
void UNyongMovementComponent::UpdateFromCompressedFlags(uint8 Flags)
{
Super::UpdateFromCompressedFlags(Flags);
Safe_bWantsToSprint = (Flags & FSavedMove_Nyong::FLAG_Sprint) != 0;
}이런식으로 사용할 수 있다. 가독성 말고는 크게 좋은 점은 없지만, 완성도를 높이기 위해 이렇게 했다.
