12주차 기록을 작성하다보니 내용이 길어져 부득이하게 나누었습니다.
12주차 -1 을 먼저 읽고 오면 내용 이해가 더 잘 될 수 있으니 링크를 걸어 놓도록 하겠습니다.
그러면 다시 12주차 기록 슈~~웃 토!
플랫폼 드라이버
등장 배경
대부분의 임베디드 SoC에는 USB나 PCI처럼 스스로 “나 여기 있어요!”라고 외칠 수 있는 장치(discoverable device)가 거의 없습니다.
대신 GPIO, UART, I²C 컨트롤러, PWM 등은 CPU 내부에 하드 와이어드(hard-wired) 되어 있어서 부팅할 때 누가 어디에 있는지 미리 알려줘야 합니다.
그래서 리눅스 커널은 이런 장치들을 위한 가상 버스를 만들었는데, 그게 바로 platform bus입니다.
platform_device ←── 이름으로 매칭 ───→ platform_driver
(하드웨어 정보) (제어 코드)
↑ ↑
└────────────── platform bus (중개) ───────────┘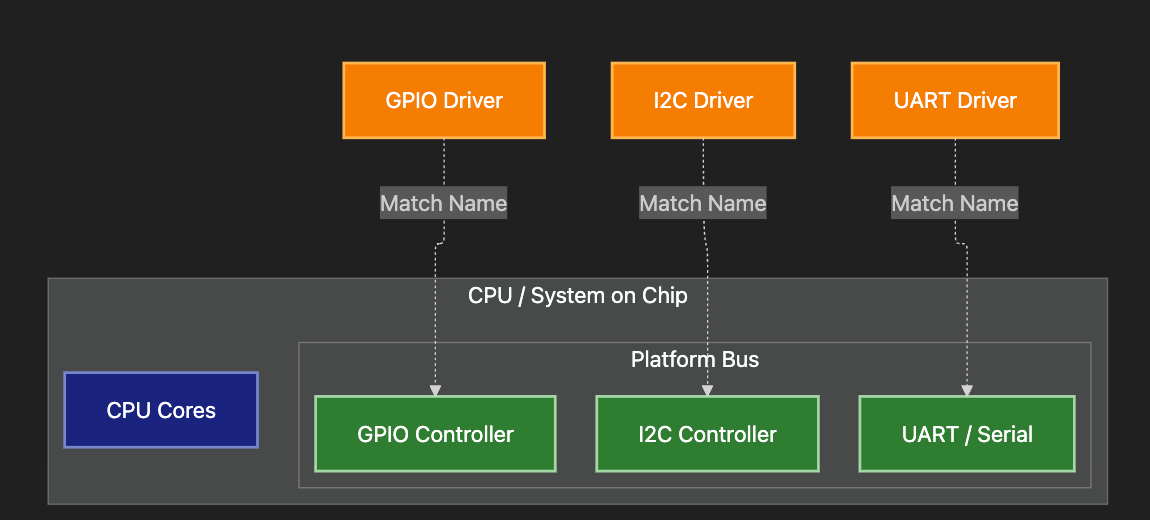
platform bus가 하는 일
binding
디바이스 트리에 기술된 하드웨어 정보와 커널에 작성된 드라이버 코드를 하나로 묶어주는 과정
Matching
- 하드웨어 측 (DTS):
compatible = "vendor,model";이라는 식별자를 가짐 - 소프트웨어 측 (Driver):
struct of_device_id테이블에 자신이 지원하는compatible리스트 보유
바인딩은 커널이 부팅되거나 모듈이 로드될 때 플랫폼 버스(Platform Bus) 위에서 일어난다.
전체 Process
-
등록 (Registration)
커널이 디바이스 트리를 읽어
platform_device를 생성하고, 드라이버가 로드 →platform_driver가 등록됩니다. -
비교 (Matching)
플랫폼 버스가 양쪽의
compatible문자열 비교1. discoverable devices plug -play usb, pci , - adapter interrupt! -> enumeration ! <- device descriptor 2. non- discoverable devices4가지 방법 존재
- OF style match → 요즘 많이 사용하는 비교 방식
-> compatible 속성 : 문자열 비교
-> 문자열 일치 시 probe 함수 호출 - the id table match → old fashion
- driver name match
- ACPI style match
- OF style match → 요즘 많이 사용하는 비교 방식
-
결합 (Binding)
이름이 일치하면 커널은 드라이버의
probe()함수를 호출 -
전달 (Resource Passing)
이때 디바이스 트리에 적힌
reg(주소),interrupts(번호) 등의 자원 정보가 드라이버에 전달됩니다.
Device Tree
배경
과거에는 보드마다 소스코드에 하드 코딩하거나 별도의 헤더파일을 만들어서 빌드했습니다.
→ 매번 커널을 다시 컴파일해야 했고, 유지보수가 힘들었다.
→ 이를 해결
바이너리 형태(.dtb)로 메모리에 올려두고,
커널이 부팅하면서 그 정보를 읽어서 장치를 만듭니다.
Bootloader (U-Boot, Raspberry Pi firmware 등)
↓
kernel8.img + .dtb 파일을 메모리에 올림
↓
커널 시작 → early boot 단계에서 .dtb를 읽음
↓
내부적으로 트리 구조로 펼쳐서 메모리에 저장
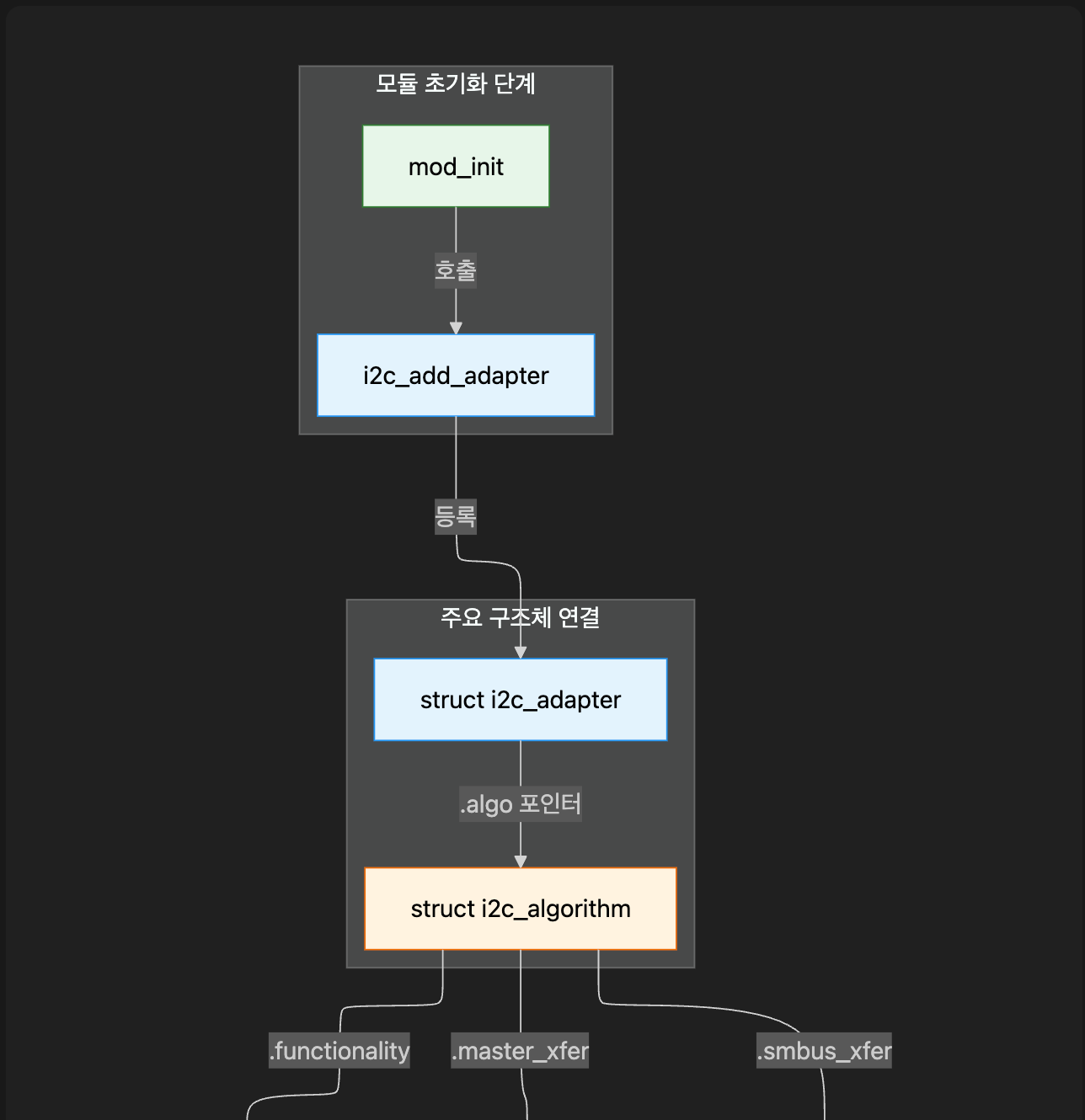
(런타임 FDT)platform_driver의 .of_match_table과 매칭되면서 probe() 함수가 호출되는 시작점⭐️⭐️
compatible = "raspberrypi,bcm2835-gpio";dtoverlay의 동작 방식
dtoverlay my-overlay명령 실행/boot/overlays/my-overlay.dtbo파일 읽음- 이미 메모리에 펼쳐져 있는 현재 FDT (Flattened Device Tree)를 대상으로 오버레이에 적힌 내용대로 기존 노드 수정 & 새 노드 추가
example)
&i2c1 { status = "okay"; ... }→ 기존 i2c1 노드 찾아서 status 변경my-sensor@48 { ... }→ 새로운 자식 노드 추가
- 변경된 내용을 커널의
of_overlay프레임워크가 적용- 변경된 부분에 해당하는 platform_device들이 새로 생성/갱신됨
- → 해당 compatible을 가진 드라이버의
probe()함수가 새로 호출됨==>💡동적 로딩 !시스템이 켜져있는 상태에서도 dtoverlay 명령어를 통해서 하드웨어 설정을 즉시 반영할 수 있다
⚠️작성 규칙 : 반드시
/dts-v1/;과/plugin/;선언이 포함되어야함
.dts 파일 변환
# dtc -@ -I dts -O dtb -o 01_dev.dtbo 01_dev.dts
01_dev.dts:16.30-24.16: Warning (unit_address_vs_reg):
/fragment@0/__overlay__/rpihat_device@0: node has a unit name, but no reg property
#====> dts 파일을 커널이 읽을 수 있는 dtbo로 변경 플랫폼 드라이버 패턴 (LED + KEY 실습)
static int my_probe(struct platform_device *pdev)
{
struct my_private_data *priv;
priv = devm_kzalloc(&pdev->dev, sizeof(*priv), GFP_KERNEL);
if (!priv) return -ENOMEM;
// 가장 많이 쓰는 devm_ 패밀리
priv->led = devm_gpiod_get(&pdev->dev, "led", GPIOD_OUT_LOW);
priv->key = devm_gpiod_get(&pdev->dev, "key", GPIOD_IN);
priv->irq = gpiod_to_irq(priv->key);
devm_request_irq(&pdev->dev, priv->irq, my_isr,
IRQF_TRIGGER_FALLING, "my-key", priv);
platform_set_drvdata(pdev, priv);
return 0;
}
static const struct of_device_id my_of_match[] = {
{ .compatible = "mycompany,super-hat" },
{ }
};
MODULE_DEVICE_TABLE(of, my_of_match);
static struct platform_driver my_driver = {
.probe = my_probe,
.remove = my_remove,
.driver = {
.name = "super-hat",
.of_match_table = my_of_match,
}
};
module_platform_driver(my_driver);⚠️ 주의 사항
devm_함수를 적극 활용 → remove에서 해제 안 해도 됨- probe 실패 시 반드시 적절한 error code 반환 (-ENODEV, -ENOMEM 등)
dtoverlay먼저 →insmod순서 지키기- dmesg에 디버깅용
dev_info()적극 활용 - compatible 문자열은 절대 오타 내지 않기 (가장 중요)
여러 드라이버
MISC
character 디바이스 드라이버 중 하나
major 번호로 장치의 종류를 구분하는 문자 장치의 구분에서 10으로 지정 된다 → 부번호만 설정하면 자동으로 장치 파일을 만들어 준다 .
. miscdevice의 장점- 자동화:
class_create,device_create를 호출하지 않아도/dev/아래에 파일이 자동으로 생성 - Major 번호 절약: 여러 드라이버가 Major 10번을 공유하므로 커널의 리소스를 효율적으로 씁니다.
- 간결함:
cdev_init,cdev_add같은 복잡한 초기화 과정이 필요 없습니다.
- 자동화:
입력 드라이버
주요 입력 장치 : 키보드 , 마우스 , 조이스틱 , 터치 스크린 등등
특징: 간헐적 데이터 발생
바이트 단위 데이터
인터럽트 기반의 동작
-> irq line
USB
usb keyboard
인터럽트 (x) -> irq 라인이 없음 [ 하드웨어 선 x ]
컨트롤 , 이소 , 벌크 , 인터럽트 (흉내) 전송 모드 (O)
event oriented → 표준화를 통해 input 디바이스 드라이버 탄생
이벤트 핸들러 디바이스 드라이버
하드웨어 ──→ 입력 장치 드라이버 (input_dev 등록)
↓
input core (이벤트 큐 관리)
↓
┌───────────┬───────────┬───────────┐
│ │ │ │
evdev keyboard mouse joydev ... ← 이벤트 핸들러들
│ │ │ │
↓ ↓ ↓ ↓
/dev/input/eventX /dev/input/mice 콘솔 키보드 등이벤트 핸들러는 입력 장치 드라이버(input device driver)가 생성한 이벤트를 받아서 사용자 공간(user-space)으로 전달하는 중간 역할을 하는 모듈
udev
입력 장치(키보드, 버튼, 조이스틱 등)를 만들 때마다
/dev/input/event0,/dev/input/event1,/dev/input/event2… 이런 식으로
번호가 계속 바뀌는 문제
→ 이를 어떻게 해결할 것인가 ??
udev : 동적 장치 관리자 → user system에서 동작
커널의 sysfs 과 연동하여 장치 파일을 동적으로 생성하고 관리
→ 드라이버가 인식한 장치를 사용자 친화적인 환경으로 만들어 주는 사용자 공간의 관리자
- 기능
- 장치 인식: 새로운 장치 파일 연결시 커널로부터 정보를 받아 인식
- 장치 파일 생성 : /dev 디렉터리에 적절한 장치 파일 생성
- 규칙 기반 관리 : /etc/udev/rules.d 에 정의된 규칙 파일과 비교
구현 예시
root@rpi:/etc/udev/rules.d# cat 99-rpihat.rules
SUBSYSTEM=="input", KERNEL=="event*", ATTRS{name}=="rpihat",
SYMLINK+="input/rpihat", MODE="0666"
# 파일 생성 숫자가 클 수록 나중에 적용된다 → 99 설정
# 1. 규칙 새로고침
sudo udevadm control --reload-rules
root@rpi:~/exercise_A05.251102/08# systemctl restart udev
# 2. 이미 꽂혀있는 장치들에게 규칙 강제 적용 (또는 드라이버를 rmmod -> insmod 해도 됨)
sudo udevadm trigger
root@rpi:~# ls -l /dev/input/rpihat
lrwxrwxrwx 1 root root 6 1월 8 11:37 /dev/input/rpihat -> event2
=> 확인 가능 I2C 이해하기
I²C(Inter-Integrated Circuit)는 2선만으로 여러 장치를 연결할 수 있는 직렬 통신 프로토콜입니다.
구성 요소
- SDA : 데이터가 실제로 오가는 선 (양방향)
- SCL : 마스터가 만드는 클럭(박자) 선
- Pull-up 저항 (필수❗) : 신호가 없을 때 High 상태 유지
마스터-슬레이브 구조
마스터(Raspberry Pi)가 클럭을 만들고, 슬레이브(센서, OLED 등)가 대답합니다.
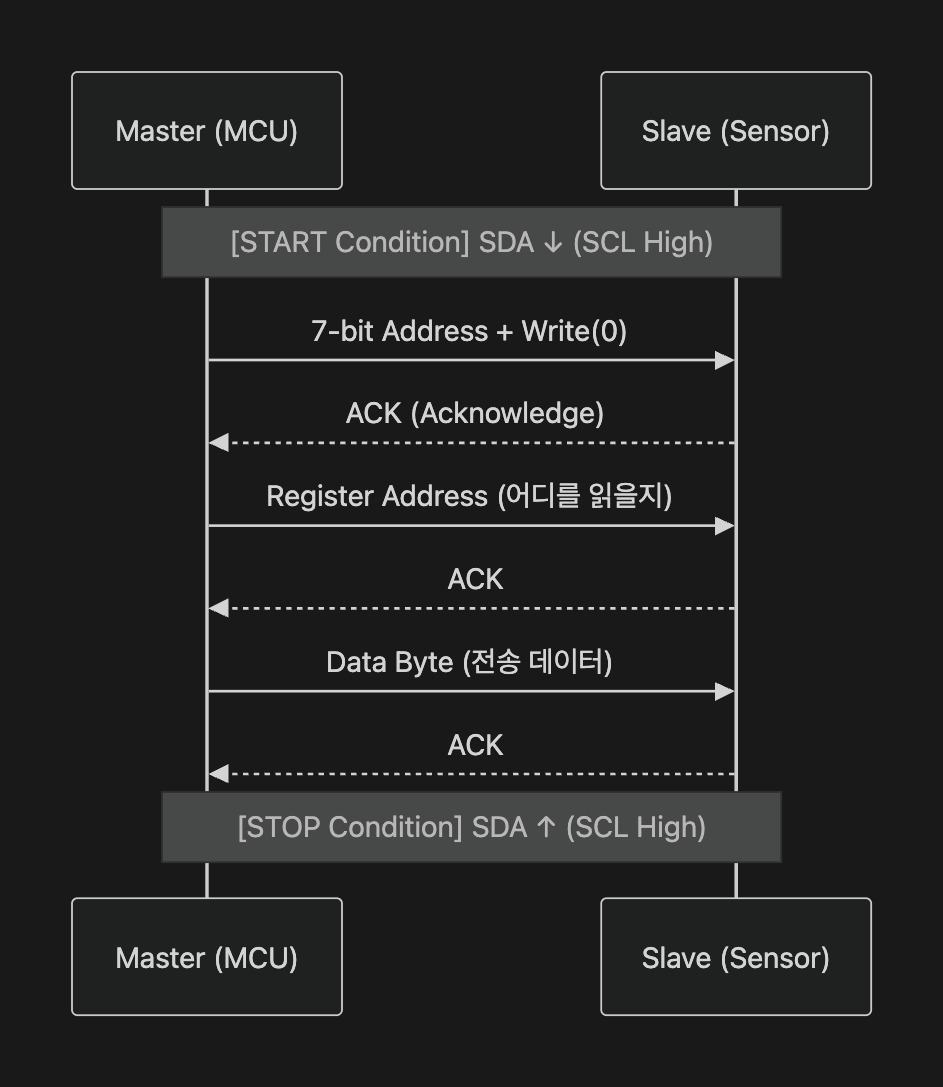
Start: SCL High + SDA High → LowStop: SCL High + SDA Low → High
트랜잭션 (주소 + 레지스터 + 데이터 1바이트)
Start
│
▼
SCL ┌─┐ ┌─┐ ┌─┐ ┌─┐ ┌─┐ ┌─┐ ┌─┐ ┌─┐ ┌─┐ ┌─┐ ┌─┐ ┌─┐ ┌─┐
│ │ │ │ │ │ │ │ │ │ │ │ │ │ │ │ │ │ │ │ │ │ │ │
┌──┘ └─┘ └─┘ └─┘ └─┘ └─┘ └─┘ └─┘ └─┘ └─┘ └─┘ └─┘ └─┘
SDA A6 A5 A4 A3 A2 A1 A0 W (7bit 주소 + W=0) ACK D7~D0 ACK Stop
└───────────────────────┘ └────────┘
Master가 보냄 Slave가 ACK Master 데이터 Slave ACK1
Start → [7bit 주소 + W(0)] → ACK → [레지스터 주소] → ACK → [데이터] → ACK → Stop
→ 9번째 비트마다 ACK(NACK) 확인이 들어갑니다.특징
- 선이 2개라 회로가 단순하고 127개 까지 장치를 붙일 수 있음
- SPI에 비해 속도가 느리고 풀업 저항 설정이 중요함(노이즈에 취약)
- 가장 먼저 해보는 I²C 디버깅 3단계 (꼭 해보세요!)
새로운 I²C 장치를 붙였을 때 무조건 이 순서로 확인합니다.
Linux에서의 I2C 통신 전체 Flow
| 전체 FLOW | Module to Excute |
|---|---|
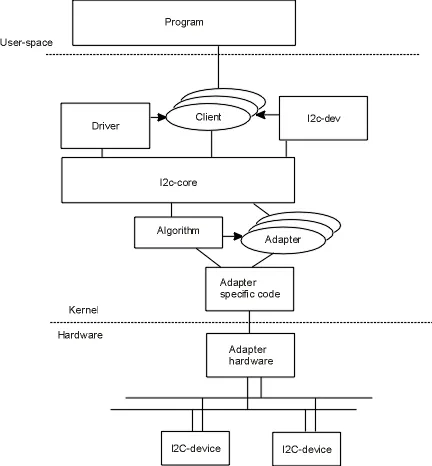 |  |
i2c_adapter ← 하드웨어 (BCM2835 I²C 컨트롤러) → /dev/i2c-1
↑
i2c_algorithm ← 전송 방법 (master_xfer 함수 포인터): 소프트웨어 측면
↑
i2c_client ← 우리가 만드는 드라이버 (BMP280, SSD1306 등)Soc에는 대개 I2C 컨트롤러가 내장되어 있음 → 저수준 인터페이스
→ 이게 /dev/i2c-{num} → 이렇게 장치 파일로 표현됨
해당 디바이스 파일을 열고 write , read, ioctl 함수를 호출하면 각각 i2c adapter의 함수로 연결
❔ioctl : I2C 버스는 여러 장치가 공유하므로, "지금 누구랑 말할 것인가"를 결정
→ 사용자 공간에서는 /dev/i2c-1 파일을 열고 ioctl(I2C_SLAVE)로 “지금 누구랑 얘기할지” 정합니다.
I2C Adapter
Adapter의 종류
i2cdetect -F <busaddress. ie, 1>
1. I2C
standard
2. SMBus ( is a subset of I2C )
variation (-> PC , notebook)
smbus_ * => 비교적 안전하게 쓸 수 있음 표준 I2C Adapter를 활용한 값 읽기 및 설정
#장치가 버스에 붙었는지 확인
i2cdetect -y 1→ 0x76 (BMP280), 0x3C (SSD1306) 등이 보이면 성공
#칩 ID 읽어보기 (가장 확실한 생존 확인)
i2cget -y 1 0x76 0xD0 b # BMP280 → 0x58 나와야 정상
#레지스터 직접 쓰고 읽기 (기본 통신 확인)
i2cset -y 1 0x76 0xE0 0xB6 # 소프트 리셋
i2cget -y 1 0x76 0xD0 b사용자 공간에서 I²C 직접 제어하는 실습
BMP280 칩 ID 읽기 예제 : 0xD0 값 읽어 오기
-
src code
#include <sys/ioctl.h> #include <linux/i2c-dev.h> #define I2C_BUS_PATH "/dev/i2c-1" // RPi의 기본 I2C 버스 #define BMP280_I2C_ADDR 0x76 // 센서의 슬레이브 주소 #define BMP280_ID_REG 0xD0 // 칩 ID가 저장된 레지스터 주소 int main() { int fd; unsigned char buf[1]; // 1. I2C 버스 파일 열기 fd = open(I2C_BUS_PATH, O_RDWR); // 2. 통신할 대상(Slave) 주소 설정 if (ioctl(fd, I2C_SLAVE, BMP280_I2C_ADDR) < 0) { . } // 3. 읽고 싶은 레지스터 번호를 먼저 전송 (Write) // "지금부터 0xD0번지에 있는 값을 알고 싶어"라고 명령하는 단계 buf[0] = BMP280_ID_REG; write(fd, buf, 1); // 4. 레지스터 값 읽기 (Read) // 센서가 보낸 1바이트 데이터를 수신 read(fd, buf, 1) ; // 5. 결과 출력 (BMP280의 경우 정상 시 0x58 출력) printf("BMP280 Chip ID: 0x%02X\n", buf[0]); close(fd); }
커널 I²C 클라이언트 드라이버 패턴 (BMP280)
기본 패턴
static int bmp280_probe(struct i2c_client *client) {
// 1. 장치가 맞는지 ID 확인
u8 id;
i2c_smbus_read_byte_data(client, 0xD0); // 0x58 확인
// 2. private data 할당
struct bmp280_data *data = devm_kzalloc(...);
// 3. i2c device 등록
i2c_set_clientdata(client, data);
// 4. sysfs나 character device 생성 (선택)
return 0;
}
static const struct i2c_device_id bmp280_id[] = {
{ "bmp280", 0 },
{ }
};
static struct i2c_driver bmp280_driver = {
.driver = { .name = "bmp280" },
.probe = bmp280_probe,
.id_table = bmp280_id,
};
module_i2c_driver(bmp280_driver);SMBus
리눅스는 원래 PC 친화적.
SMBus(Smart Battery Bus, I²C의 서브셋)를 기본적으로 더 잘 지원합니다.
SMBus 장점
- 타임아웃 기능 → 장치가 멈추면 버스 초기화
- PEC(Packet Error Checking) → 데이터 신뢰성 향상
모든 리눅스 I²C 어댑터가 SMBus 명령을 보장
→ 그래서 실습에 사용한 BMP280 이외에도 대부분의 센서는 i2c_smbus_read_byte_data() 같은 함수를 씁니다.
BMP280을 활용한 클라이언트 드라이버의 구현은 BMP280 Driver 에 구현 내용을 따로 정리하도록 하겠습니다!
IIO(Industrial I/O)
산업용 센서 및 I/O장치를 위한 표준화 프레임 워크
탄생 배경
- 파편화된 드라이버 => 각 센서마다 독자적인 드라이버 및 인터페이스 필요
- application 개발자가 매번 새로운 인터페이스를 학습 해야함
- 비효율적인 데이터 처리
- 복잡한 드라이버 개발
해결책
- 통합된 API
- 고성능 데이터 처리
버퍼링
- 재사용 가능한 프레임 워크구성
IIO Core- 드라이버 등록 및 관리
- 드라이버와 사용자 공간을 연결하는 역할
- 특징
- 드라이버 개발자는 IIO 코어 API를 사용해 자신의 장치를 쉽게 등록
- CORE에서 복잡한 것을 처리
IIO channel- 센서의 개별 측정 항목을 나타내는 논리적인 단위
- 각 채널은 고유한 속성을 가짐 ⇒ 센서 각각의 정보 (ie, x,y,z,정보 )
- 속성들은 sysfs를 통해 사용자 공간에 노출
- 센서의 개별 측정 항목을 나타내는 논리적인 단위
IIO Buffer- 센서 데이터 일시 저장 FIFO 버퍼
- 데이터 효율화 → 오버헤드 감소 (샘플을 모아서 전달 )
- 동기화
IIO Trigger- 데이터 샘플링을 쓰거나 버퍼에 데잍를 써놓도록 하는 이벤트
- 특징
iio_device_enable_buffer()함수를 통해 트리거와 버퍼를 연결 후 다양한 트리거 소스 사용
Flow example
[물리 세계]
↓ (물리량 → 전기 신호)
센서 (BMP280, DHT11, MPU6050 등)
↓ (아날로그 → 디지털, 레지스터 읽기)
드라이버 (IIO 드라이버 코드)
↓ (측정값 → 채널별 raw/processed 값)
IIO 채널 (in_temp_raw, in_pressure_input 등)
↓ (트리거 발생 시점에 데이터 캡처)
트리거 (timer / external GPIO / software)
↓ (캡처된 데이터 임시 저장)
IIO 버퍼 (FIFO처럼 쌓아두기)
↓ (IIO core가 관리)
IIO Core (sysfs + /dev/iio:deviceX 인터페이스 제공)
↓ (두 가지 주요 경로)
├─── A. sysfs 경로 ──→ 설정/단일 값 읽기
│ (/sys/bus/iio/devices/iio:deviceX/in_*)
└─── B. 문자 장치 파일 ──→ 고속/연속 데이터 스트리밍
(/dev/iio:deviceX read())
↓
사용자 공간 애플리케이션
(libiio, 직접 read(), cat, iio_info 등)IIO VS sysfs VS Character device
sysfs
장점 : 간편한 key -value 쌍으로 설정 및 접근 ⇒ 구현이 간단
단점
- read : 한번에 한개의 샘플 데이터만 읽음 → 데이터 스트리밍에 부적합
- 타이밍이 보장되지 않음
- 버퍼링 및 큐잉 기능 없음Device file 방식
open , read , write , ioctl을 통한 접근
장점 : 자유도가 높다 . ioctl로 복잡한 제어 명령 설정 가능
단점
- 장치마다 제각각인 명령 형식 → 호환성 x
- read, open ,write 등 모든 인터페이스를 직접 구현해야하는 부담IIO 접근방식
- 표준화된 인터페이스 제공
- sysfs를 통해 장치 설정 및 정보 조회
- 통합된 버퍼링 방식 제공
- dev/iio:deviceX 형태의 문자 장치 파일을 사용할 수 있음 .
- read() 함수를 통해 버퍼링된 데이터 묶음을 효율적으로 읽을 수 있다
→ 비동기적 read
- trigger 지원
- 다채널 지원 → 온도 압력 습도 등을 하나의 버퍼에 동시에 받는다IIO 사용 예제
DHT-11를 활용하여 라즈베리 파이에서 IIO 실습을 진행했습니다.
#IIO 코어 모듈 로드
root@rpi:~/# modprobe industrialio
#dht-11 module 확인
root@rpi:~/# modprobe -D dht11
insmod /lib/modules/6.1.21-v8+/kernel/drivers/iio/industrialio.ko.xz
insmod /lib/modules/6.1.21-v8+/kernel/drivers/iio/humidity/dht11.ko.xz
# 의존성을 가진다
root@rpi:~/# lsmod | grep 03_dev
03_dev 16384 0
industrialio 90112 2 iio_hwmon,03_dev
-> industrialio 먼저 올려야함
root@rpi:~/# modinfo 03_dev.ko
filename: /root/../03_dev.ko
license: GPL v2
description: DHT11 humidity/temperature sensor driver
srcversion: C1D68BD9D145141E3DCFD8E
alias: of:N*T*CrpihatC*
alias: of:N*T*Crpihat
depends: industrialio
name: 03_dev
vermagic: 6.1.21-v8+ SMP preempt mod_unload modversions aarch64
=========================================================
#모듈 로드 이후
root@rpi:/sys/bus/iio/devices/iio:device0# xxd in_temp_input
00000000: 3235 3032 0a 2502.
root@rpi:/sys/bus/iio/devices/iio:device0# xxd in_humidityrelative_input
00000000: 3138 3030 0a 1800.
root@rpi:/sys/bus/iio/devices/iio:device0
=> 해당 경로에 인터페이스 생성
==> APP client에서도 여기서 값을 읽어온다.- src code
static const struct iio_chan_spec dht11_chan_spec[] = { { .type = IIO_TEMP , .info_mask_separate = BIT(IIO_CHAN_INFO_PROCESSED), }, { .type = IIO_HUMIDITYRELATIVE, .info_mask_separate = BIT(IIO_CHAN_INFO_PROCESSED), } };
IIO 등록 → in_temp_input, in_humidityrelative_input 자동 생성iio = devm_iio_device_alloc(dev, sizeof(*dht11)); dht11 = iio_priv(iio); // iio->priv → dht11 구조체 연결 iio->name = pdev->name; iio->info = &dht11_iio_info; // read_raw() 콜백 연결 iio->modes = INDIO_DIRECT_MODE; // 버퍼링 모드 지정 iio->channels = dht11_chan_spec; // 온도/습도 2개 채널 iio->num_channels = ARRAY_SIZE(dht11_chan_spec); devm_iio_device_register(dev, iio); // IIO 디바이스 등록 (/sys/bus/iio/ 아래 생성)- 인터럽트 + 타이머 중심 동작은 misc device기반 드라이버 구현과 동일
- result
root@rpi:~/# ./app Temperature: 2507 Humidity is: 1700 ================= > 클라이언트에서 값을 확인 후 출력 - IIO VS Misc Device
| 항목 | Misc Device | IIO 버전 | 차이점 |
|---|---|---|---|
| 인터페이스 | /dev/rpihat (misc device) + cat으로 문자열 출력 | /sys/bus/iio/devices/iio:deviceX/ (sysfs) + /dev/iio:deviceX (버퍼링) | 표준화 (IIO) vs 커스텀 (misc) |
| 데이터 접근 방식 | read() → 단일 값 (습도 온도 문자열) | read_raw() → 온도/습도 각각 독립 채널로 정수 값 제공 | 채널별 분리 + 고속 버퍼링 가능 |
| 사용자 접근 방법 | cat /dev/rpihat → "550 2500" | cat /sys/bus/iio/.../in_temp_input → 온도 cat/sys/bus/iio/.../in_humidityrelative_input → 습도 | IIO 표준 경로 사용 (다른 IIO 센서와 동일) |
| 버퍼링/스트리밍 | 없음 (1회 읽기) | /dev/iio:deviceX read로 버퍼링된 샘플 묶음 읽기 가능 | 고속/연속 측정에 최적화 |
| 트리거/비동기 지원 | 없음 | IIO trigger (timer/external) 사용 가능 → 주기적 자동 샘플링 | 실시간 스트리밍 가능 |
| 호환성/확장성 | 낮음 (커스텀 인터페이스) | 높음 (IIO는 libiio, ROS, Yocto 등에서 표준 지원) | 현대 리눅스 센서 표준 |
해당 내용을 마지막으로 12주차의 내용이 끝났습니다 . 다양한 디바이스별로 여러 드라이버 구현 방법을 빠르게 배우면서 코드 구현 보다는 차이점 파악 및 다뤄보기 위주로 교육이 흘러갔는데요 . . 앞으로 혼자서 끄적여 보면서 실제로 디바이스 드라이버를 만드는 임베디드 초고수가 되기 위해서 달려 나가 보겠습니닷
🏃🏃🏃🏃
리눅스 디바이스 드라이버 끄읏~~~!!
12주차 자투리
월요일에 점심 근처 카페에서 커피를 샀더니 꽃까지 받아 부러씁니다.
괜시리 꽃을 보고 기분이 좋아지는 것은 1살을 더 먹었기 때문일까요 .. 헛헛 😭
Welcome to my World .
Just Enjoy your life
And Good Luck .