본 글은 STM32F769I MCU를 기준으로 작성되었습니다.
세부적인 내용은 제품군마다 조금씩 다를 수 있습니다.
1. FMC란?
FMC란 Flexible Memory Controller의 줄임말로, MCU 외부에 연결된 각종 메모리를 관리하기 위한 모듈을 말한다. 주로 NAND/NOR Flash Memory나 SDRAM을 제어하기 위해 사용된다.
보통 TFT-LCD나 이미지·그래픽 처리를 위해서는 내장 메모리만으론 공간이 부족하기 때문에 외장 메모리를 사용한다.
STM32F769I-DISC1 보드에는 128Mbit짜리 SDRAM이 붙어있다. 16MB인 셈이다.
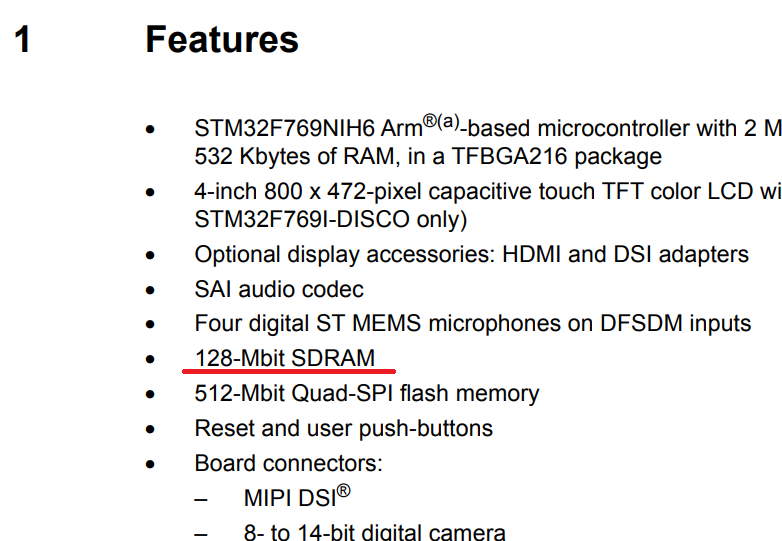
이를 FMC를 통해 제어할 수 있다.
2. 예제
SDRAM에 접근하여 값을 읽고 쓰는 예제를 만들어보자.
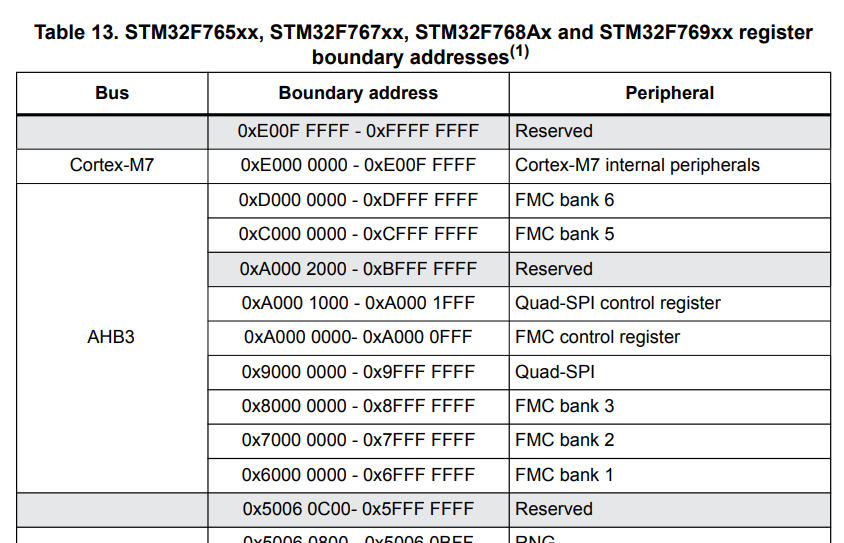
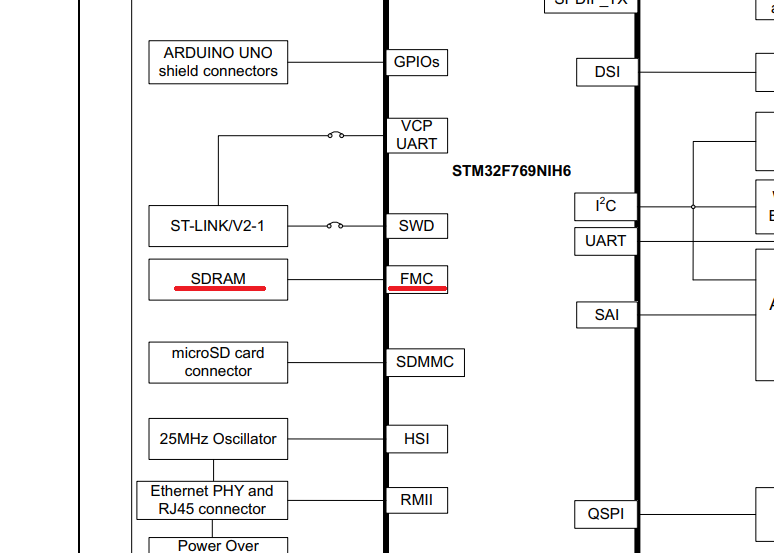
STM32F769I-DISC1에서는 AHB 버스에 FMC가 물려있다고 한다.
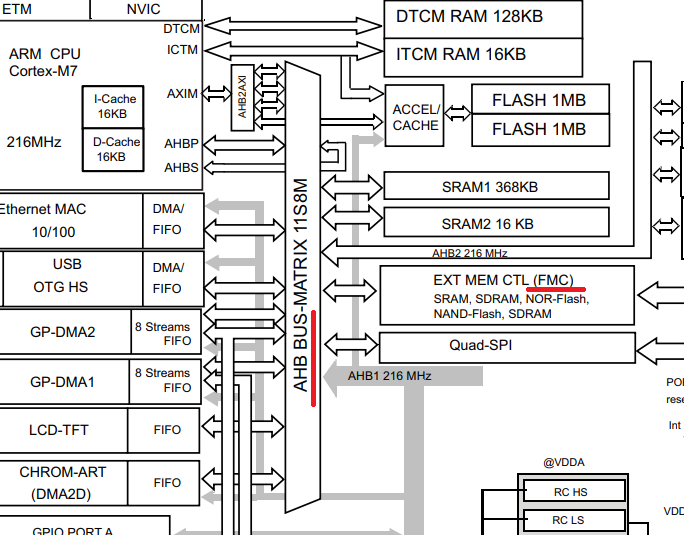
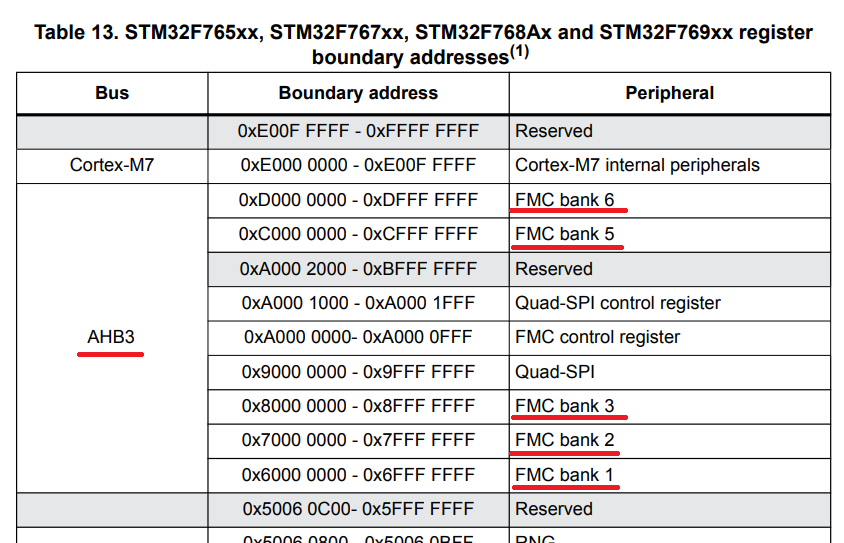
정확히는 AHB3에 물려있으며, Bank #1~6까지 관리하는 것을 볼 수 있다.
1. Configuration
FMC를 초기화해보자.
대충 아래와 같이 설정한다. 아래의 설정을 토대로 MX_FMC_Init 함수가 생성되지만, 본 예제에선 해당 함수를 사용하지 않기 때문에 아무렇게나 설정해도 된다.
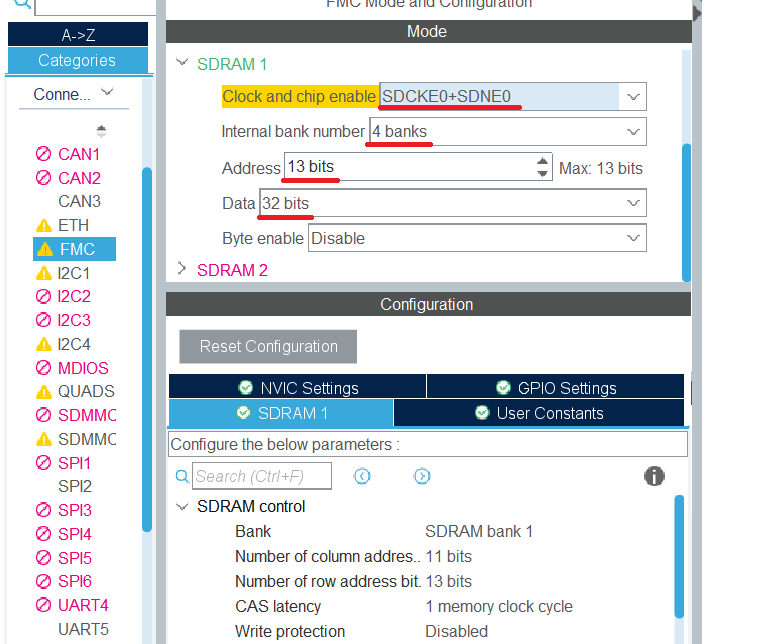
위와 같이 설정 후 저장하여 코드를 생성하자.
2. BSP 라이브러리 불러오기
stm32에서는 Discovery 보드에 붙어있는 IC들을 제어하기 위한 Discovery BSP 라이브러리를 제공한다.
STM32F769-DISC1 보드에는 MT48LC4M32B2B5-6A 이라는 SDRAM이 붙어있으며, 이를 제어하기 위한 BSP 라이브러리가 제공된다.
BSP 라이브러리를 가져와보자.
PC에 설치되어 있는 STM32Cube MCU Package의 경로를 찾아가면 아래와 같이 BSP 폴더가 있다.
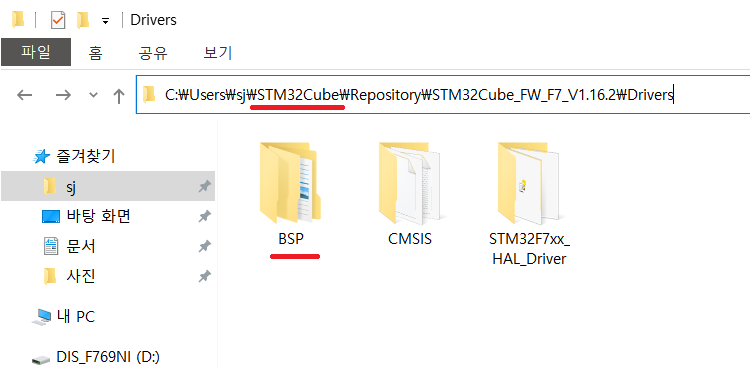
이를 폴더 째로 복사한 후 프로젝트의 Drivers 폴더 아래에 붙여넣는다.
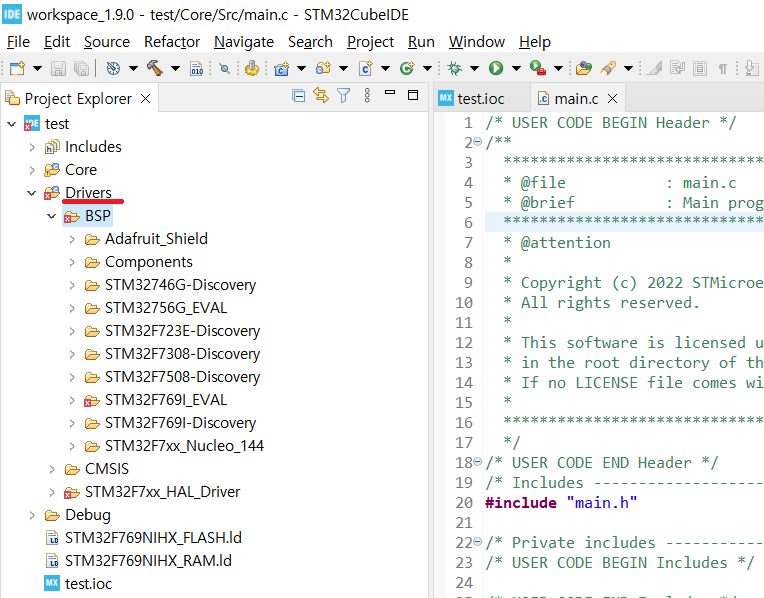
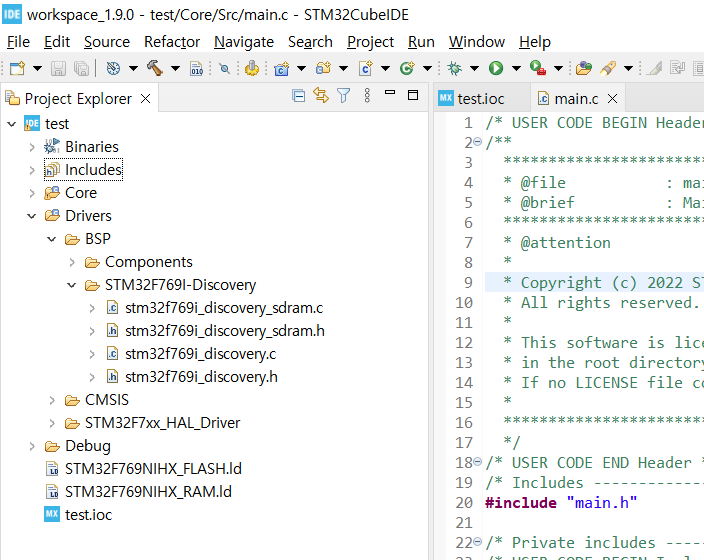
그리고 BSP 폴더 내에 있는 관계 없는 파일들을 지워준다. 필자는 STM32F769I-DISC1 보드를 사용하기 때문에 Components와 STM32F769I-Discovery 외에 모두 삭제하였다. 그 외에도 빌드 에러가 해결될 때까지 필요없는 파일들을 지워준다.
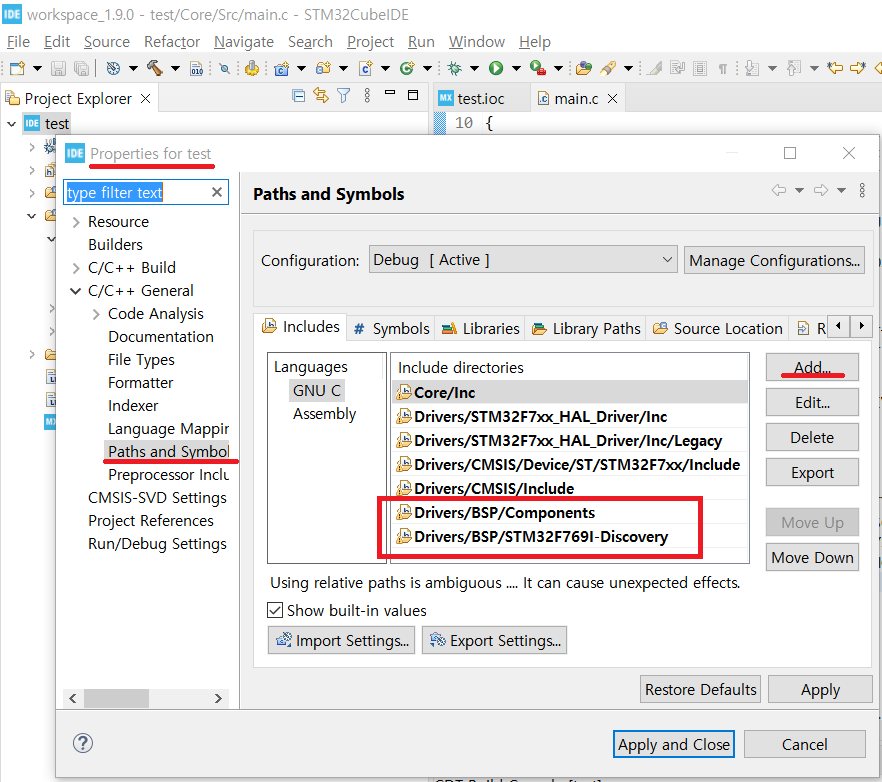
그리고 프로젝트 우클릭 - Properties 에 들어가서 아래와 같이 빌드 경로를 추가해준다.
이후 main.c에 아래 코드를 추가하여 빌드하면 정상 빌드되는 것을 볼 수 있다.
#include "stm32f769i_discovery_sdram.h"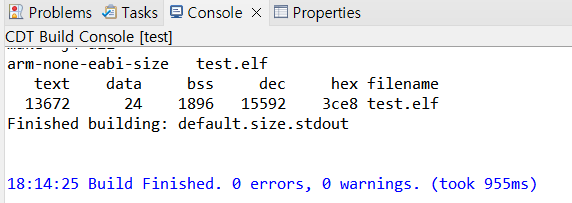
3. 코드 작성
SDRAM에 값을 쓴 다음 읽어서 비교하는 코드를 만들어보자.
srcBuffer와 dstBuffer를 할당한 다음 srcBuffer에 임의의 값을 채워 SDRAM에 write하고, 이를 다시 dstBuffer로 read해서 두 버퍼를 비교하여 동일하면 OK, 서로 다르면 NG를 출력한다.
.ioc 파일 저장 시 MX_FMC_Init 함수가 자동으로 생성되는데, 이를 사용하지 않고 대신 BSP_SDRAM_Init 함수를 이용한다.
BSP_SDRAM_Init 함수는 STM32F769I에서 MT48LC4M32B2B5-6A를 사용하기 위해 해야하는 설정들을 자동으로 해준다. 해당 함수에서 GPIO AF 설정도 같이 이루어지기 때문에, 달리 건드릴 게 없다. (그래서 아예 MX_FMC_Init 코드도 지워버렸다.)
전체 코드는 아래와 같다.
#include "main.h"
#include "stm32f769i_discovery_sdram.h"
#include <stdio.h>
#define BUFFER_SIZE 256
UART_HandleTypeDef huart1;
SDRAM_HandleTypeDef hsdram1;
void SystemClock_Config(void)
{
RCC_OscInitTypeDef RCC_OscInitStruct = { 0, };
RCC_ClkInitTypeDef RCC_ClkInitStruct = { 0, };
__HAL_RCC_PWR_CLK_ENABLE();
__HAL_PWR_VOLTAGESCALING_CONFIG(PWR_REGULATOR_VOLTAGE_SCALE3);
RCC_OscInitStruct.OscillatorType = RCC_OSCILLATORTYPE_HSI;
RCC_OscInitStruct.HSIState = RCC_HSI_ON;
RCC_OscInitStruct.HSICalibrationValue = RCC_HSICALIBRATION_DEFAULT;
RCC_OscInitStruct.PLL.PLLState = RCC_PLL_ON;
RCC_OscInitStruct.PLL.PLLSource = RCC_PLLSOURCE_HSI;
RCC_OscInitStruct.PLL.PLLM = 8;
RCC_OscInitStruct.PLL.PLLN = 192;
RCC_OscInitStruct.PLL.PLLP = RCC_PLLP_DIV4;
RCC_OscInitStruct.PLL.PLLQ = 4;
RCC_OscInitStruct.PLL.PLLR = 2;
HAL_RCC_OscConfig(&RCC_OscInitStruct);
RCC_ClkInitStruct.ClockType = RCC_CLOCKTYPE_SYSCLK | RCC_CLOCKTYPE_HCLK | RCC_CLOCKTYPE_PCLK2;
RCC_ClkInitStruct.SYSCLKSource = RCC_SYSCLKSOURCE_PLLCLK;
RCC_ClkInitStruct.AHBCLKDivider = RCC_SYSCLK_DIV1;
RCC_ClkInitStruct.APB2CLKDivider = RCC_HCLK_DIV2;
HAL_RCC_ClockConfig(&RCC_ClkInitStruct, FLASH_LATENCY_3);
}
static void MX_USART1_UART_Init(void)
{
huart1.Instance = USART1;
huart1.Init.BaudRate = 115200;
huart1.Init.WordLength = UART_WORDLENGTH_8B;
huart1.Init.StopBits = UART_STOPBITS_1;
huart1.Init.Parity = UART_PARITY_NONE;
huart1.Init.Mode = UART_MODE_TX_RX;
huart1.Init.HwFlowCtl = UART_HWCONTROL_NONE;
huart1.Init.OverSampling = UART_OVERSAMPLING_16;
huart1.Init.OneBitSampling = UART_ONE_BIT_SAMPLE_DISABLE;
huart1.AdvancedInit.AdvFeatureInit = UART_ADVFEATURE_NO_INIT;
HAL_UART_Init(&huart1);
}
static void MX_GPIO_Init(void)
{
GPIO_InitTypeDef GPIO_InitStruct = { 0, };
__HAL_RCC_GPIOA_CLK_ENABLE();
GPIO_InitStruct.Pin = GPIO_PIN_10 | GPIO_PIN_9;
GPIO_InitStruct.Mode = GPIO_MODE_AF_PP;
GPIO_InitStruct.Pull = GPIO_PULLUP;
GPIO_InitStruct.Speed = GPIO_SPEED_FREQ_LOW;
GPIO_InitStruct.Alternate = GPIO_AF7_USART1;
HAL_GPIO_Init(GPIOA, &GPIO_InitStruct);
}
int _write(int fd, char *ptr, int len)
{
HAL_UART_Transmit(&huart1, (unsigned char*)ptr, len, HAL_MAX_DELAY);
return len;
}
void MY_SDRAM_Test(void)
{
int error = 0;
uint32_t srcBuf[BUFFER_SIZE] = { 0, };
uint32_t dstBuf[BUFFER_SIZE] = { 0, };
// 1. Fill buffer with random values
for (int i = 0; i < BUFFER_SIZE; i++)
{
srcBuf[i] = i;
}
// 2. Write data to SDRAM
printf("Write data to SDRAM.\r\n");
BSP_SDRAM_WriteData(SDRAM_DEVICE_ADDR, srcBuf, BUFFER_SIZE);
// 3. Read data from SDRAM
printf("Read data from SDRAM.\r\n");
BSP_SDRAM_ReadData(SDRAM_DEVICE_ADDR, dstBuf, BUFFER_SIZE);
// 4. Verify by comparing buffers
printf("Verify by comparing buffers.\r\n");
for (int i = 0; i < BUFFER_SIZE; i++)
{
if (srcBuf[i] != dstBuf[i])
{
error++;
}
}
// 5. Print result
printf("SDRAM Test Result: %s\r\n", error ? "NG" : "OK");
}
int main(void)
{
HAL_Init();
SystemClock_Config();
MX_GPIO_Init();
MX_USART1_UART_Init();
// Initialize SDRAM
BSP_SDRAM_Init();
// Test SDRAM
MY_SDRAM_Test();
while (1);
}
void Error_Handler(void)
{
}4. 빌드 및 실행 결과
빌드 후 실행하면 아래와 같이 터미널에 결과가 출력된다.
SDRAM Read/Write가 정상적으로 이루어져 OK가 출력된 것을 볼 수 있다.