Ultrasonic Driver
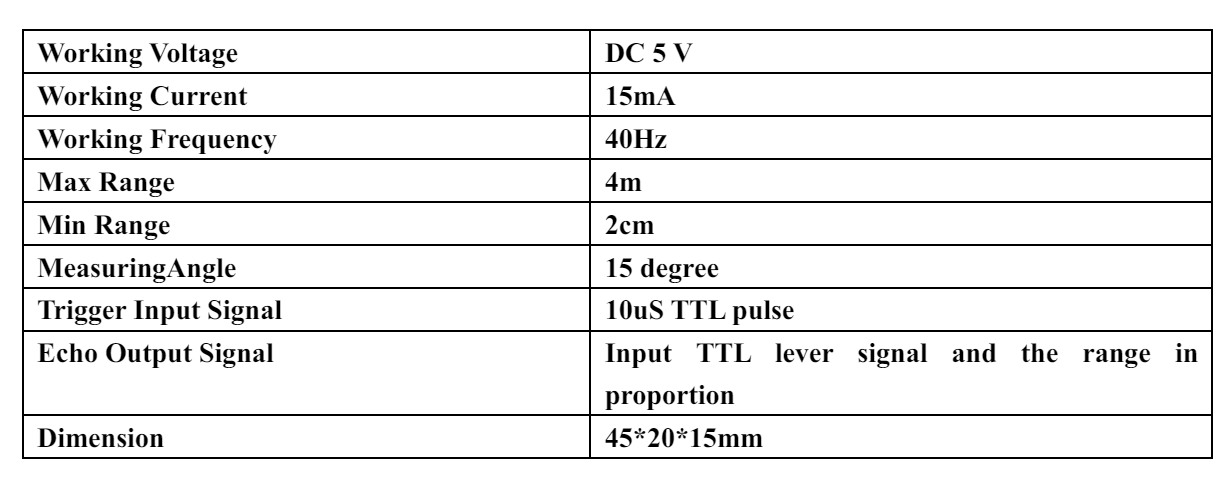
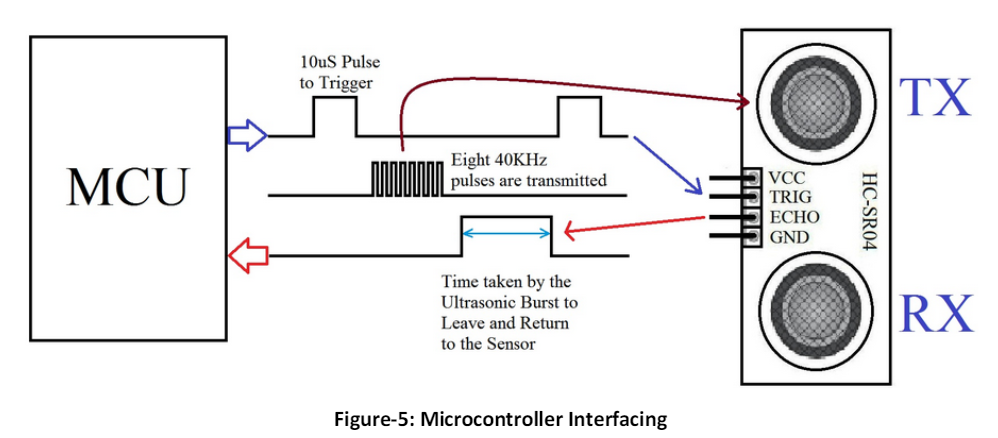
TRIG에서 10us의 pulse를 주면 40kHz의 초음파가 발사되고, ECHO핀은 High로 올라간다.
물체에 반사되어 다시 초음파센서로 수신되면 ECHO핀은 Low로 떨어지게 된다.
이때 ECHO핀의 High level시간으로 거리를 측정할 수 있다.
Distance = High level time(ECHO pin) X sound velocity(340m/s) / 2
TRIG핀을 output으로, ECHO핀을 외부인터럽트로 설정한다. TRIG핀에서는 위의 Timing Diagram과 같이 Pulse를 만들고, ECHO핀에서는 인터럽트를 이용해 Rising/Falling Edge에서 인터럽트가 걸리도록 한다. Timer를 이용해 Rising Edge에서 시간측정을 시작하고, Falling Edge에서 시간측정을 멈추고, 시간 데이터를 가져온다.
모든 인터럽트는 NVIC(Nested Vectored Interrupt Controller)를 통해 제어된다.
-
Nested는 인터럽트가 발생한 상황에서 더 우선순위가 높은 인터럽트가 발생할 수 있다는 것
-
Vectored는 벡터테이블에 쓰여있는대로 인터럽트 발생 시 그 주소로 이동하는 것
-
인터럽트 과정 : 인터럽트가 발생했을 때 해당 인터럽트 벡터테이블에 있는곳으로 가서 안에 입력되있는 해당인터럽트함수(인터럽트 서비스 루틴)의 주소로 간다
함수코드를 수행하고 다시 원래대로 복귀
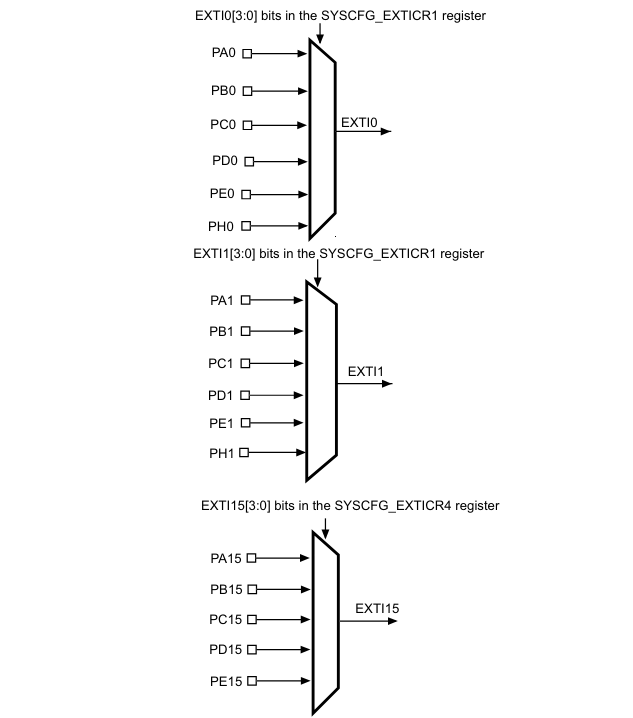
핀 숫자가 같은거는 서로 묶여있다.
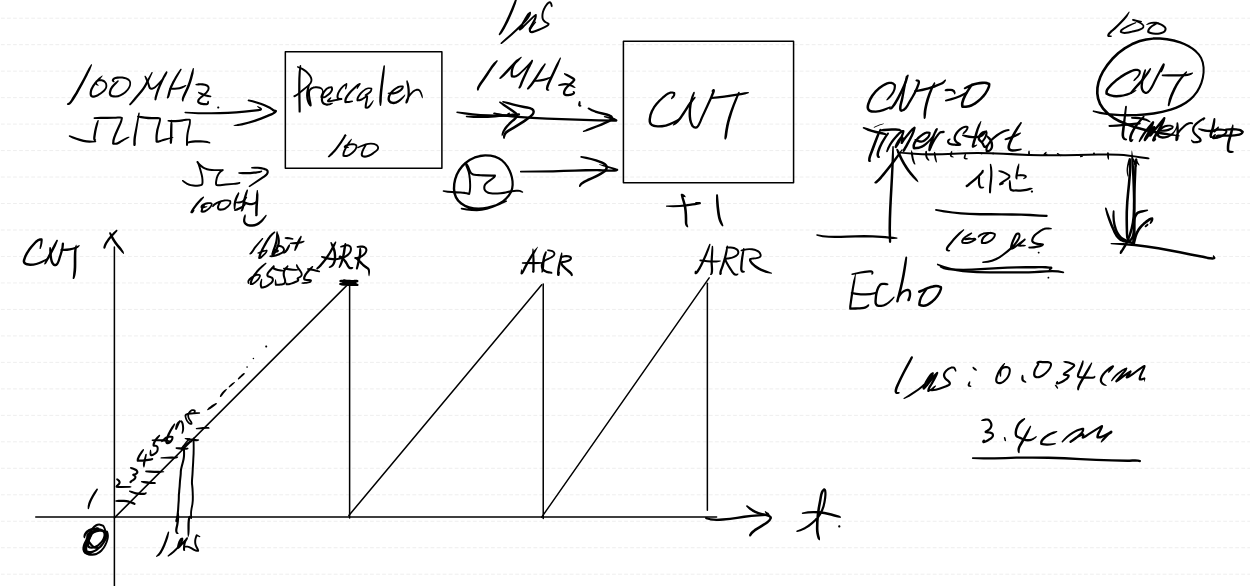
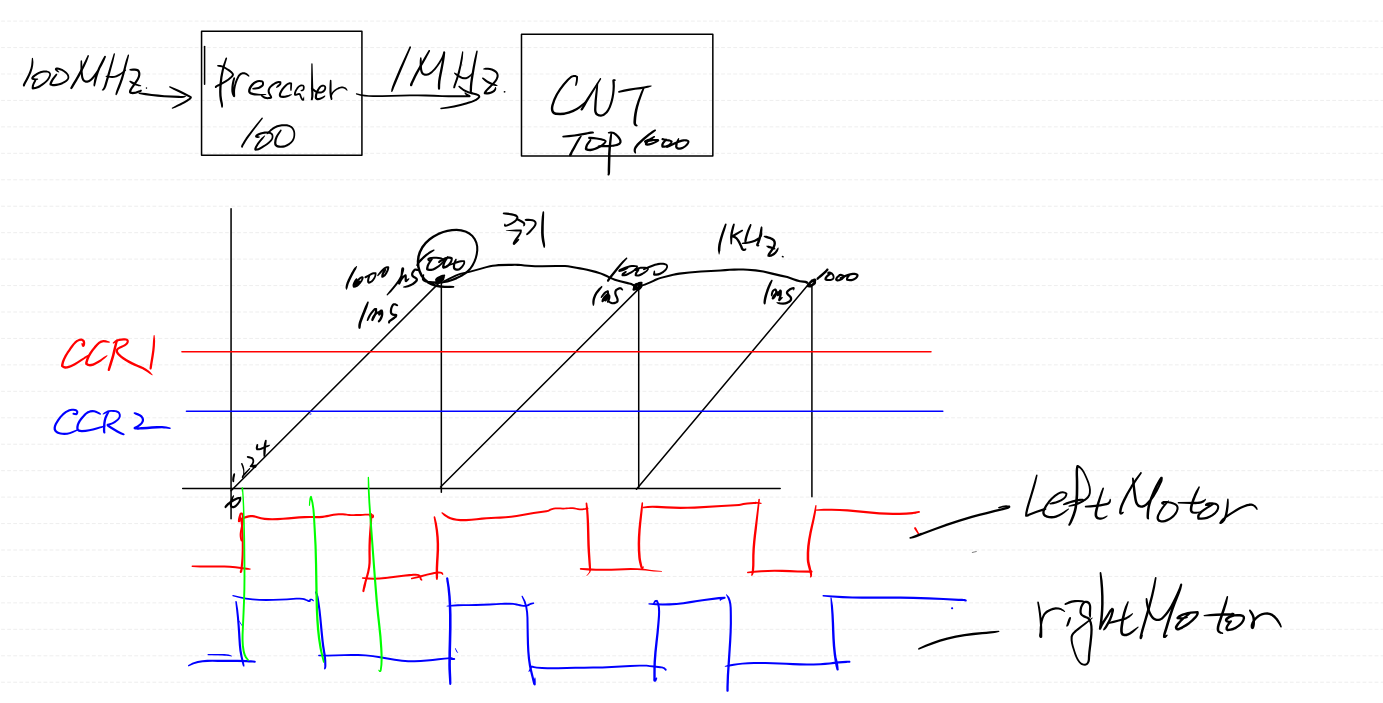
Timer는 주파수 100MHz를 100으로 prescaling하여 1MHz, 즉 1 CNT 당 1us로 계산하였다.
#include "Ultrasonic.h"
#include "stm32f4xx_hal.h"
#include "../common/delayus/delayus.h"
// trig port, trig pin, echo port, echo pin, timer, flag
typedef struct { // 다르게 쓰인 정보를 구조체로 표현
TIM_HandleTypeDef *hTim;
GPIO_TypeDef* GPIO_Trig;
uint16_t GPIO_TrigPin;
GPIO_TypeDef* GPIO_Echo;
uint16_t GPIO_EchoPin;
uint16_t timCounter;
int echoFlag;
} ultraSonic_t;
void UltraSonic_init(
ultraSonic_t *ultraSonic, TIM_HandleTypeDef *hTim,
GPIO_TypeDef* GPIO_Trig, uint16_t GPIO_TrigPin,
GPIO_TypeDef* GPIO_Echo, uint16_t GPIO_EchoPin)
{
ultraSonic->hTim = hTim;
ultraSonic->GPIO_Trig = GPIO_Trig;
ultraSonic->GPIO_TrigPin = GPIO_TrigPin;
ultraSonic->GPIO_Echo = GPIO_Echo;
ultraSonic->GPIO_EchoPin = GPIO_EchoPin;
ultraSonic->timCounter = 0;
ultraSonic->echoFlag = 0;
}
int UltraSonic_getEchopinState(ultraSonic_t *ultraSonic)
{
return HAL_GPIO_ReadPin(ultraSonic->GPIO_Echo, ultraSonic->GPIO_EchoPin);
}
void UltraSonic_clearTimer(ultraSonic_t *ultraSonic)
{
__HAL_TIM_SET_COUNTER(ultraSonic->hTim, 0); // counter 0으로 초기화
}
void UltraSonic_startTimer(ultraSonic_t *ultraSonic)
{
HAL_TIM_Base_Start(ultraSonic->hTim); // count 시작
}
void UltraSonic_stopTimer(ultraSonic_t *ultraSonic)
{
HAL_TIM_Base_Stop(ultraSonic->hTim); // count 끝
}
uint16_t UltraSonic_getTimerCounter(ultraSonic_t *ultraSonic)
{
return __HAL_TIM_GET_COUNTER(ultraSonic->hTim); // count값을 가져와 저장
}
void UltraSonic_ISR_Process(ultraSonic_t *ultraSonic, uint16_t GPIO_Pin) //interrupt가 rising/falling edge에서 걸림
{
if ((GPIO_Pin == ultraSonic->GPIO_EchoPin)) {
// echo pin high 유지시간 측정
if (UltraSonic_getEchopinState(ultraSonic)) { // rising edge
UltraSonic_clearTimer(ultraSonic);
UltraSonic_startTimer(ultraSonic);
UltraSonic_clearEchoFlag(ultraSonic);
}
else { // falling edge
UltraSonic_stopTimer(ultraSonic);
ultraSonic->timCounter = UltraSonic_getTimerCounter(ultraSonic);
UltraSonic_setEchoFlag(ultraSonic);
}
}
}
void UltraSonic_startTrig(ultraSonic_t *ultraSonic)
{
HAL_GPIO_WritePin(ultraSonic->GPIO_Trig, ultraSonic->GPIO_TrigPin, SET);
DelayUS(15);
HAL_GPIO_WritePin(ultraSonic->GPIO_Trig, ultraSonic->GPIO_TrigPin, RESET);
}
void UltraSonic_clearEchoFlag(ultraSonic_t *ultraSonic)
{
ultraSonic->echoFlag = 0;
}
void UltraSonic_setEchoFlag(ultraSonic_t *ultraSonic)
{
ultraSonic->echoFlag = 1;
}
int UltraSonic_isCmpltRecvEcho(ultraSonic_t *ultraSonic)
{
return ultraSonic->echoFlag;
}
int UltraSonic_getDistance(ultraSonic_t *ultraSonic)
{
int timeout = 0;
UltraSonic_startTrig(ultraSonic);
while(!UltraSonic_isCmpltRecvEcho(ultraSonic)){ // 완료되면 탈출
timeout++;
if(timeout > 20) return 0;
HAL_Delay(1);
}
UltraSonic_clearEchoFlag(ultraSonic);
return ultraSonic->timCounter * 0.017; // cm distance
}UltraSonic_getDistance함수를 사용해 거리를 측정할 수 있다.
Motor Driver
PWM(Pulse Width Modulation)은 주기 내에서 High와 Low의 duty비가 달라짐에 따라 평균 전압이 달라진다.
-
PWM Mode 1 : CNT < CCR 에서 High, CNT > CCR 에서 Low를 출력한다.
-
Pulse(CCR) : 기준값
-
Output compare preload : Enable상태에서 CCR값을 변경했을 때 다음 주기부터 변경값이 적용된다.
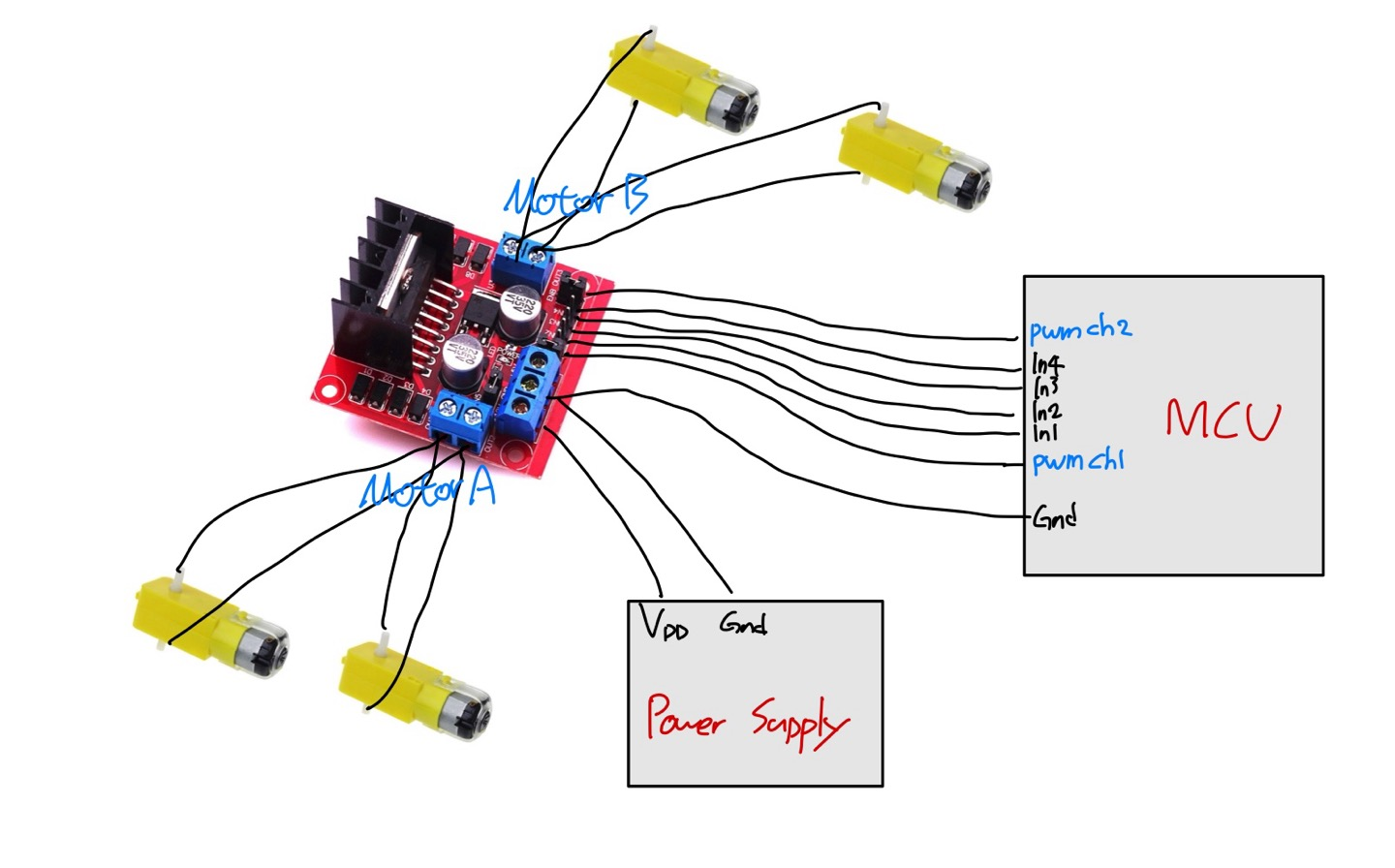
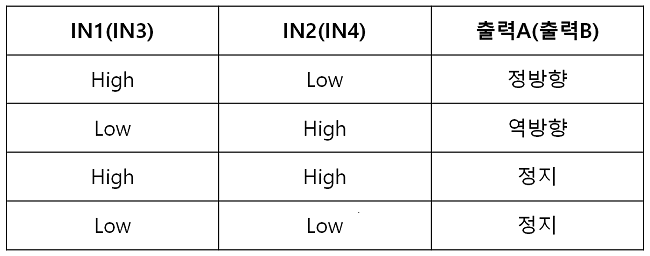
enable핀에 pwm을 연결하고, input핀을 조절해 정방향과 역방향을 만들 수 있다.
2개의 Channel(왼쪽 모터, 오른쪽 모터)을 사용

#include "motor.h"
#include "stm32f4xx_hal.h"
typedef struct {
TIM_HandleTypeDef *htim;
uint32_t Channel;
GPIO_TypeDef *dir1_GPIO;
uint16_t dir1_GPIO_PIN;
GPIO_TypeDef *dir2_GPIO;
uint16_t dir2_GPIO_PIN;
}motor_t;
void Motor_init(motor_t *motor,
TIM_HandleTypeDef *htim,
uint32_t Channel,
GPIO_TypeDef *dir1_GPIO,
uint16_t dir1_GPIO_PIN,
GPIO_TypeDef *dir2_GPIO,
uint16_t dir2_GPIO_PIN)
{
motor->htim = htim;
motor->Channel = Channel;
motor->dir1_GPIO = dir1_GPIO;
motor->dir1_GPIO_PIN = dir1_GPIO_PIN;
motor->dir2_GPIO = dir2_GPIO;
motor->dir2_GPIO_PIN = dir2_GPIO_PIN;
}
void Motor_stop(motor_t *motor)
{
HAL_TIM_PWM_Stop(motor->htim, motor->Channel);
}
void Motor_forward(motor_t *motor)
{
HAL_GPIO_WritePin(motor->dir1_GPIO, motor->dir1_GPIO_PIN, SET);
HAL_GPIO_WritePin(motor->dir2_GPIO, motor->dir2_GPIO_PIN, RESET);
HAL_TIM_PWM_Start(motor->htim, motor->Channel);
}
void Motor_backward(motor_t *motor)
{
HAL_GPIO_WritePin(motor->dir1_GPIO, motor->dir1_GPIO_PIN, RESET);
HAL_GPIO_WritePin(motor->dir2_GPIO, motor->dir2_GPIO_PIN, SET);
HAL_TIM_PWM_Start(motor->htim, motor->Channel);
}
void Motor_setSpeed(motor_t *motor, int speedVal)
{
__HAL_TIM_SET_COMPARE(motor->htim, motor->Channel, speedVal);
}