참고
- da14697
- 예제코드
- 예제코드2
- 코드 특징 : 하고자하는 통신들을 Task로 만들어서 Init 한 후,
Task가 돌아가면 각자 Notify를 보내고, 그 Notify에 맞게 각자 switch, case문으로 돌아감.
- 코드 특징 : 하고자하는 통신들을 Task로 만들어서 Init 한 후,
- 회로도
- 유저가이드
- SDK가이드(필독)
DA14697 DevKit-Pro
- 아키텍쳐 : Cortex M3
- 벤더 : Dialog
- SPI에서 mode 0, 1, 2, 3 지원 (얏호~)
- RSL10에서 모드 0, 1만 지원해서 넘어왔다.
- 예제코드 : RSL10 보다 많음.
- VOut : 3.3v는 없지만 3.0v들이 있음.
IDE : Smart Snippets Studio
- 프로그램 설치, SDK 설치 후, SDK폴더경로로 프로그램 켜기
- 설치하라는 친구들 다 설치
SPI_Tutorial
-
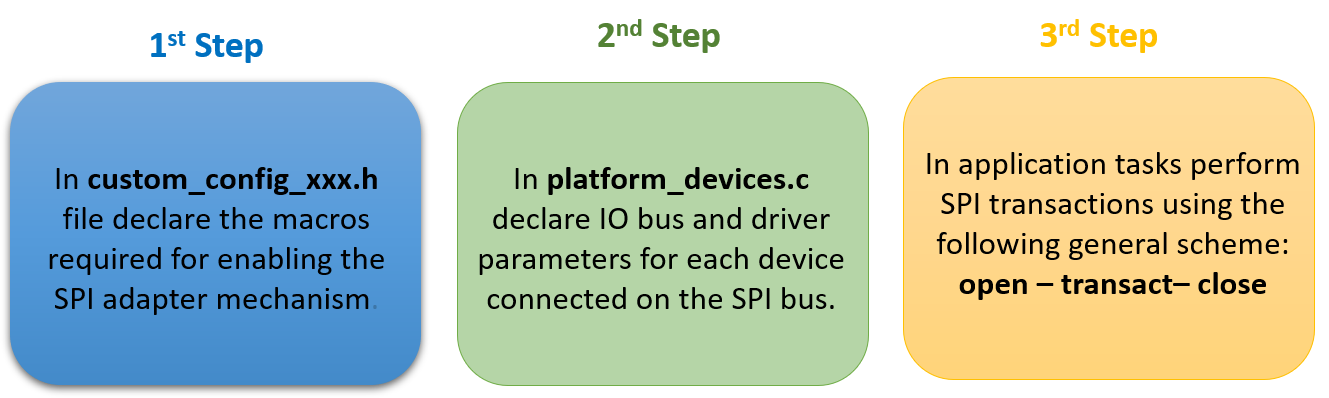
이 3가지 과정은 SPI, I2C, UART 전부 공통된 과정이다.
-
- custom_config_xxx.h 파일에서 SPI 어댑터 메커니즘을 사용하도록 설정하는 데 필요한 매크로를 선언합니다.
-
- Platform_devices.c에서 SPI 버스에 연결된 각 장치의 IO 버스 및 드라이버 매개 변수를 선언합니다.
-
- 응용 프로그램 작업에서 다음과 같은 일반적인 체계를 사용하여 SPI 트랜잭션을 수행합니다. [열기 - 트랜잭션 - 닫기]
-
1. SPI 어댑터 준비하기
- /config/custom_config_spi.h 에서 아래와 같이 매크로 변경
/*
* Macros for enabling SPI operations using Adapters
*/
#define dg_configUSE_HW_SPI (1)
#define dg_configSPI_ADAPTER (1)-
- IO 버스 및 SPI 버스에 외부적으로 연결된 모든 장치의 드라이버 구성을 선언하는 것입니다. 이러한 설정은 슬레이브 SPI 장치를 선택하고 사용할 때마다 적용됩니다. 모든 구성은 platform_devices.c 파일에 배치되어야 합니다.
-
- SPI 어댑터 메커니즘을 사용하도록 설정하면 개발자는 사용 가능한 모든 API를 사용하여 SPI 트랜잭션을 수행할 수 있습니다. 다음 단계에서는 응용 프로그램에서 SPI 쓰기/읽기 작업을 성공적으로 실행하는 데 필요한 API 시퀀스를 설명합니다.
-
ad_spi_initseca
필요한 모든 SPI 초기화 루틴을 수행하려면 플랫폼 시작(system_init()) 또는 작업 초기화 시 한 번 호출해야 합니다. -
ad_spi_openselfiles
SPI 인터페이스를 사용하기 전에 응용 프로그램 태스크가 SPI 블록에 액세스할 장치를 열어야 합니다. 디바이스를 열려면 필요한 모든 리소스를 확보하고 대상 디바이스 및 IO 버스 설정으로 SPI 컨트롤러를 구성해야 합니다. 이 함수는 처리기를 후속 어댑터 함수에 사용할 수 있도록 주 흐름으로 되돌립니다. 이 기능은 모든 컨트롤러 리소스를 획득할 때까지 차단됩니다. -
ad_spi_activate_cs()
대상 SPI 장치와 상호 작용하기 전에 마스터 컨트롤러가 칩 선택 라인(로직 하이에서 로직 0까지)을 사용하지 않아야 합니다. -
동기 또는 비동기식으로 쓰기/읽기 트랜잭션을 수행합니다.
장치를 연 후 응용 프로그램 작업은 동기 또는 비동기적으로 모든 읽기/쓰기 SPI 트랜잭션을 수행할 수 있습니다. 동기 모드에서는 쓰기/읽기 트랜잭션 기간 동안 호출 작업이 차단되지만 다른 작업은 차단되지 않습니다. 비동기 모드에서는 호출 작업이 쓰기 또는 읽기 작업에 의해 차단되지 않으므로 애플리케이션 작업은 사용자 정의 콜백 함수가 호출되기를 기다리는 동안 다른 작업을 계속할 수 있으며 SPI 트랜잭션의 완료를 알린다.* 사용자 정의 콜백 함수는 ISR(Interrupt Service Routine) 컨텍스트 내에서 호출됩니다. 따라서 콜백의 실행 시간은 최대한 짧아야 하며 복잡한 계산을 포함해서는 안 됩니다. 시스템 인터럽트가 서비스되는 한 메인 애플리케이션은 중단됩니다.이전 비동기 트랜잭션이 완료되었는지 확인하지 않고 비동기 관련 API를 연속적으로 호출하지 마십시오.
-
ad_spi_csecrate_cs()
대상 SPI 장치와의 상호 작용이 완료되면 마스터 컨트롤러가 칩 선택 라인(로직 제로에서 로직 하이까지)을 어설션해야 합니다. -
ad_spi_closes
모든 사용자 작업이 완료되고 장치가 더 이상 필요하지 않게 되면 장치를 닫아야 합니다. 이 단계에서는 이전에 획득한 모든 리소스를 해제하고 사용된 SPI 블록을 비활성화 및 초기화 해제하는 작업이 포함됩니다.
2. 데모 코드
- DAC와 보드간 통신을 하는 예제 코드입니다.
- main.c 헤더 추가
#include "hw_pdc.h"
#include "ad_spi.h"
#include "hw_wkup.h"
#include "hw_sys.h"
#include <stdlib.h>
#include "peripheral_setup.h"
#include "platform_devices.h"3. 특이한 점
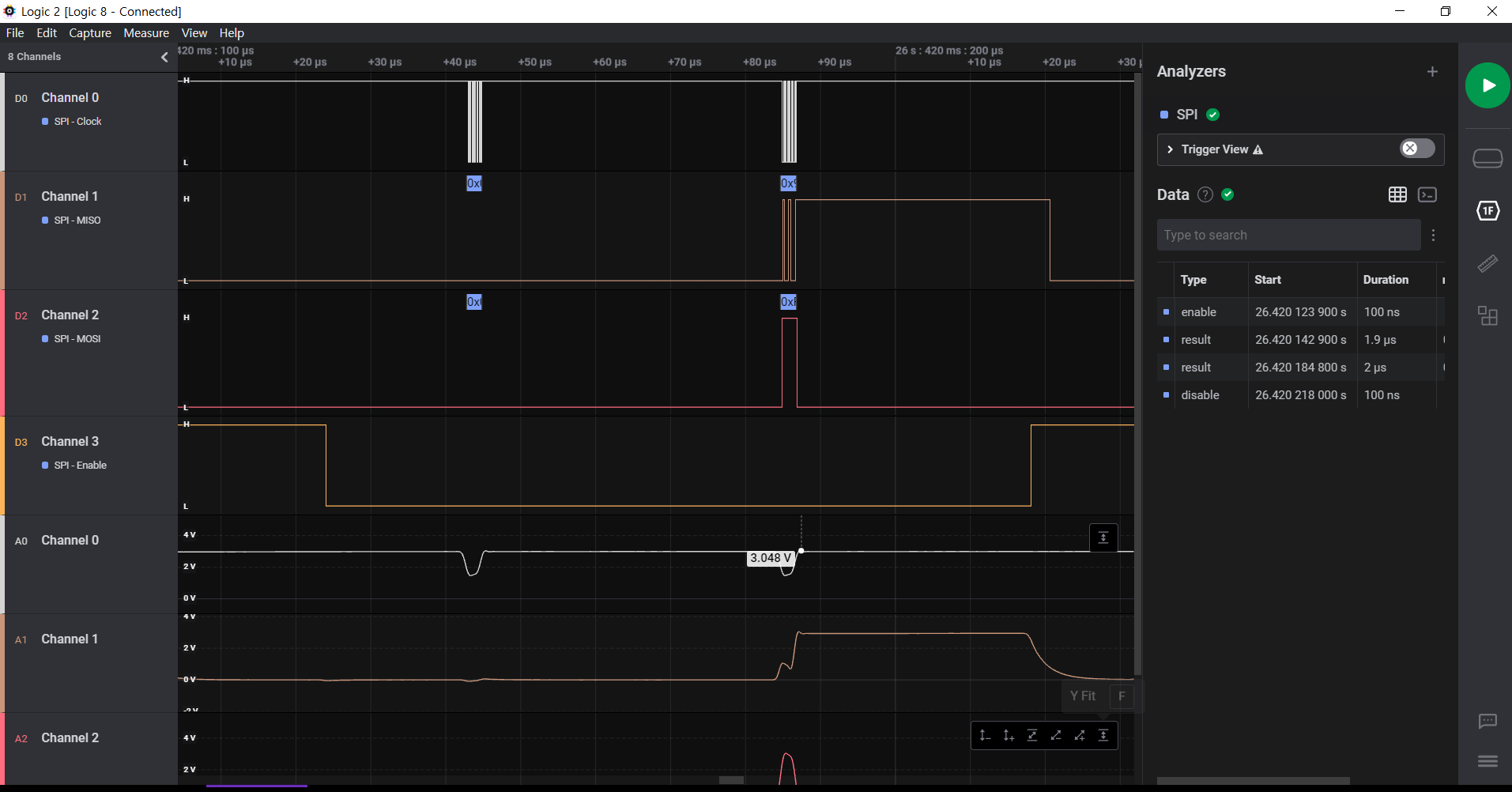
- api에서 제공해주는 write_read 코드 사용이 안되서, write, read 를 사용하여 구현하여 사용하니, 잘된다.
- read 할때 MOSI는 순간 0xFF가 된다.
(원래는 MOSI를 사용할 때만 움직여야하는데, read를 할때 0xFF가 되는 걸로 아무것도 안보낸다는 의미로 퉁치나 보다.) - printf를 사용하려면 config을 만져줘야한다(아래는 RAM 컴파일 기준)
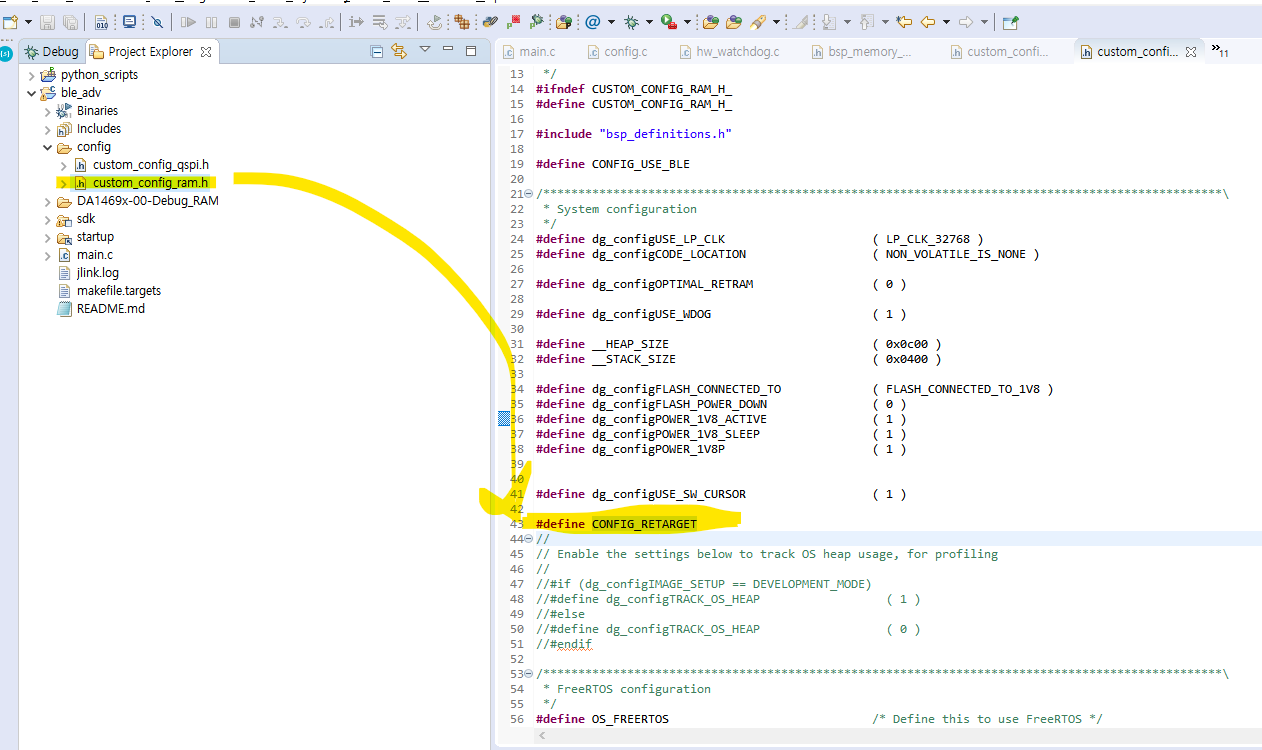
- Ram으로 한번 사용 후 리셋
- Qspi로 하면 Rom 메모리를 사용하기 때문에 계속 유지됨
- Read 하는데 데이터가 신호상으로는 오는데, 변수에 저장이 안된다.. 머지? -> 이거만 본지 언 4일차. 머가 문제인질 모르겠네...(찾아보는 중)
- SDK10.0.10.118 에서 SDK10.0.6.90 으로 바꿔서 시도 중.
- 맞는 코드이고, 빌딩도 다 되는데 자꾸 빨간줄 뜨면 껏다키면 해결됨.
- Task를 하나만 쓰기로 하고 다시 수정 진행.
- task간 충돌나서 값이 변경이 안되는가 싶었음.
- 결국 안됨.
- SPI1에서 SPI2로 변경
- 파형이 아예 안나옴.
3.1 해결
- 안그래도 새 점퍼선으로 작업하고 있었으나,
그 점퍼선 또한 문제. - GPIO를 여러곳 바꿔끼우며 시도.
- 성공
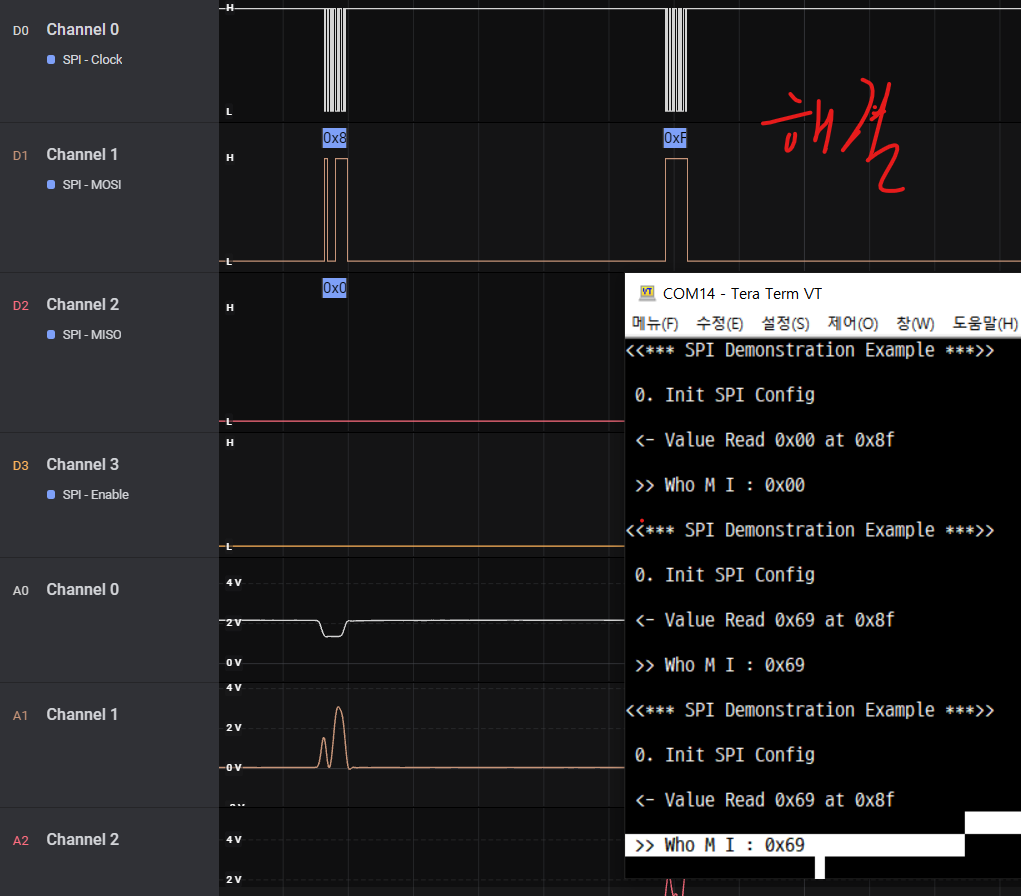
- 3축센서로 Who Am I 를 받아왔다.
- 성공
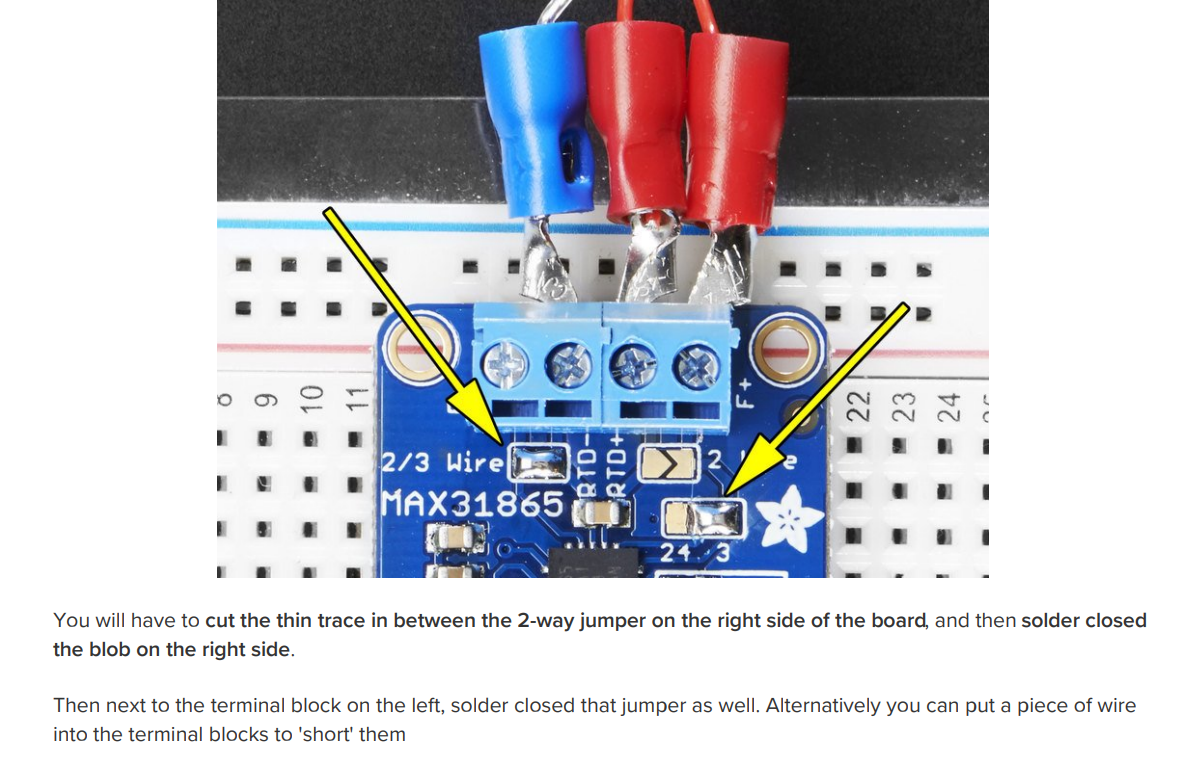
MAX31865 와 SPI 진짜 통신해보기
-
- 레지스트리 주소 확인
-
- 이 시퀀스 대로 코드를 구현해보자.
-
시퀀스
- 현재 값 Read 후 최초 Init ( 와이어3설정, Bias끄기, Auto모드 끄기 )
- 온도 읽기
- 1) Bias On 후 Delay 10ms
- 2) Single Shot 후 Delay 65ms
- 3) 온도값 읽기 ( 0x01, Data Buffer 2Byte )
- 4) Bias Off
- 반복
-
- 온도값을 받아오면 마지막 비트를 제외하고 값 계산
Fault 발생
-
값이 00 으로 계속 읽힌다.. 머가 문제지.
-
0x04 : RTD Low Threshold
- 먼가 안된댄다
- 구글에서는 이 튜토리얼 대로 해보라는데, 한번 해봐야겠다. (해결)
-
- 진짜 이거 문제였다... ㅎㅎ
Build
- UART 시리얼통신으로 터미널 볼때 시리얼 빌드 X, JTAG으로 해야함
느낀점
- 하드웨어사에서 제공해주는 Fault 나 error 레지스터가 왜 있는지 알게되었다.
- 안된다 싶으면 Fault 레지스트리도 return 해서 확인하자.
- 첫 SPI 통신 뚫기 완료 (2022.01.25 ~ 02.09)
