pc 환경 : Ubuntu 18.04 Melodic, ROS1
0. 이전의 문제점
이전에는 Kvaser사의 linuxcan, kvlibsdk라는 파일을 다운 받아서 설치하는 과정을 거쳐 CAN 정보를 다룰 수 있었다.
하지만 고질적인 문제점이 하나 있다면 가끔 가다가 개인 노트북을 인식하지 못한다는 것이다.
Kvaser 케이블을 연결했음에도 채널이 검색되지 않는 오류가 발생한다.
해결책은 Socketcan!
Kvaser사의 전용 툴이 아닌 ROS Package를 이용해 CAN 통신 연결 오류를 없애고자 한다.
그 해결책으로는 ROS 공식 Package인 ros_canopen을 사용하는 것이다.
1. install tools
sudo apt-get install can-utils
sudo apt-get install net-tools
sudo apt-get install libmuparser-dev2. Download ros_canopen Package
우선 다음 git 명령어로 ros_canpoen 패키지를 다운받자.
git clone https://github.com/ros-industrial/ros_canopen.git물론 그냥 사이트에서 zip 파일을 다운 받아서 압축을 풀어도 된다.
참고로 다운 받는 위치는 workspace내에 src 폴더이다.
다운로드가 완료되었다면 ~/(workspace) 폴더에서 catkin_make를 진행한다.
3. 컴퓨터와 CAN 장치 연결
참고로 이 과정은 Voyage 사이트를 참고했다.
Kvaser사의 CAN 선을 컴퓨터에 연결하였다면 다음 명령어를 순서대로 입력한다.
sudo modprobe can
sudo modprobe kvaser_usb
sudo ip link set can0 type can bitrate 500000
sudo ifconfig can0 up위 과정 중에 문제가 없다면 CAN 연결은 끝났다.
문제가 생기는 경우는 Device가 없거나, 연결이 중복되는 것이다.
이럴때는 CAN 선을 물리적으로 재연결 해보거나 아래 명령어를 통해서 소프트웨어적으로 재연결 해볼 수 있다.
sudo ifconfig can0 down
sudo ifconfig can0 up아래의 마지막 명령어를 입력해 CAN 정보를 받아올 수 있다.
candump can0참고로 위 명령어는 단지 CAN Bus를 Monitoring하는 명령어이며 필수는 아님.
4. CAN raw data를 ros에 publish
CAN 정보를 수신하기 위한 마지막 단계로, 이를 위해서 이때까지 고생했으니 조금만 더 힘내자.
우선 source 후에 roscore를 실행해야 한다.(ros1 기준)
다운받은 ros_canopen 패키지의 workspace로 이동하자.
cd ~/(workspace)
source devel/setup.bash패키지로 가기 전 workspace에서 위 명령어로 workspace에 source를 해주자.
이유는 workspace 내의 새로운 src 및 include 파일을 인식해야하기 때문이다.
그 후에 다음 예제를 실행함으로써 can raw data를 ros에 publish하자!
rosrun socketcan_bridge socketcan_bridge_node위 명령어를 실행 후에 rostopic list 중에 /received messages가 있으면 성공이다!
topic의 정보를 보면 알겠지만 메시지 타입이 can_msgs/Frame으로 Custom 형태이기 때문에 주의하길 바란다.(source 등등…)
추가 기능에 대한 정보
5. CAN 메시지를 보내기
cansend can0 456#00FFAA5501020304\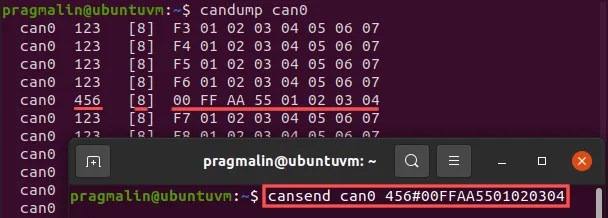
6. CAN 정보 확인
sudo systemctl restart systemd-networkd
ip -details link show can0
7. CAN log 기록
log 파일로 저장
candump -tA -l can0log 파일 디스플레이
cat candump-<파일명>추후 계획
이제 kvaser 전용 툴 없이도 can raw data를 받아올 수 있다.
그러므로 다른 팀의 개발을 위해 CAN DB에 맞게 data를 parsing하는 프로그램이 필요하다.
그 외에도 원터치로 데이터 송수신을 할 수 있는 프로그램을 만들게 된다.
