MeanShift 알고리즘
클러스터의 중심으로 이동하는 알고리즘
- 클러스터의 밀도가 가장높은곳이 중심이 될때까지 반복해서 이동
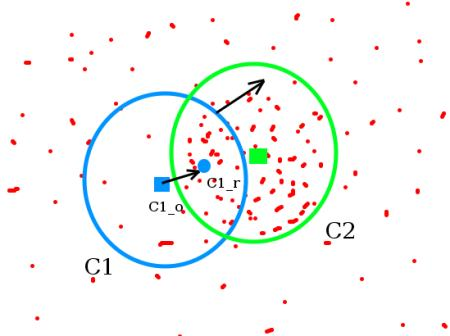
연두색 주황색으로 클러스터의 중심이 이동
MeanShift를 활용한 객체 추적 과정
BackProjection
- 히스토그램 역투영
- 여러 색상이나 특징을 가진 객체를 이미지에서 추적하는 기법
- 관심 영역의 히스토그램을 계산하고, 이 히스토그램을 이용해 유사한 영역을 찾아냄
| roi를 추출한 이미지 | BackProjection을 적용할 이미지 | BackProjection을 적용한 결과 |
|---|---|---|
 |  |  |
진행과정
- 기존의 이미지에서 추적할 이미지의 roi를 추출
- BackProjection 역추적을 활용해 추출한 roi와 유사한 객체 추적
- BackProjection 이 끝난 이미지에 meanShift 알고리즘을 적용해 객체를 추적
cv2.meanShift
import numpy as np
import cv2
cap = cv2.VideoCapture(0)
ret, frame = cap.read()
# 처음에만 얼굴을 탐지하고, 이후 meanshift에 의해서 추적하게 하도록
# haar cascade 방법 사용
face_cascade = cv2.CascadeClassifier('haarcascade_frontalface_default.xml')
face_rects = face_cascade.detectMultiScale(frame)
(face_x, face_y, w, h) = tuple(face_rects[0])
track_window = (face_x, face_y, w, h)
# 얼굴을 찾고, 찾은부의 roi 계산 및 히스토그램 추출
roi = frame[face_y:face_y+h, face_x:face_x+w]
hsv_roi = cv2.cvtColor(roi, cv2.COLOR_BGR2HSV)
roi_hist = cv2.calcHist([hsv_roi], [0], None, [180], [0, 180])
cv2.normalize(roi_hist, roi_hist, 0, 255, cv2.NORM_MINMAX)
# meanShift에 사용할 파라미터
term_crit = (cv2.TERM_CRITERIA_EPS | cv2.TERM_CRITERIA_COUNT, 10, 1)
while True:
ret, frame = cap.read()
if ret == True:
hsv = cv2.cvtColor(frame, cv2.COLOR_BGR2HSV)
# 히스토그램 역추적
dst = cv2.calcBackProject([hsv], [0], roi_hist, [0, 180], 1)
# 객체 추적
ret, track_window = cv2.meanShift(dst, track_window, term_crit)
x, y, w, h = track_window
img2 = cv2.rectangle(frame, (x, y), (x+w, y+h), (0, 0, 255), 5)
cv2.imshow('img', img2)
k = cv2.waitKey(1) & 0xff
if k == 27:
break
else:
break
cap.release()
cv2.destroyAllWindows()cv2.calcBackProject
dst = cv2.calcBackProject(images, channels, hist, ranges, scale)매개변수
-
images:- 입력 이미지의 리스트입니다. 대부분 단일 이미지를 포함한 리스트로 사용됩니다. 예:
[image].
- 입력 이미지의 리스트입니다. 대부분 단일 이미지를 포함한 리스트로 사용됩니다. 예:
-
channels:- 분석할 채널의 인덱스를 나타냅니다. 예를 들어, HSV 색 공간에서 H 채널만 사용하고 싶다면
[0]가 됩니다. 색상 히스토그램을 계산할 때 2개의 채널을 사용할 수도 있습니다(예:[0, 1]forHandSchannels).
- 분석할 채널의 인덱스를 나타냅니다. 예를 들어, HSV 색 공간에서 H 채널만 사용하고 싶다면
-
hist:- 참조할 히스토그램입니다. 보통
cv2.calcHist를 사용하여 미리 계산한 히스토그램입니다.
- 참조할 히스토그램입니다. 보통
-
ranges:- 분석할 각 채널의 범위를 지정하는 리스트입니다. 예를 들어, HSV 색 공간에서 H 채널의 범위를
[0, 180]로 설정할 수 있습니다. 각 채널마다 범위를 지정해야 합니다.
- 분석할 각 채널의 범위를 지정하는 리스트입니다. 예를 들어, HSV 색 공간에서 H 채널의 범위를
-
scale:- 결과 이미지를 확장하는 데 사용하는 변수입니다. 일반적으로 1로 설정합니다.
반환값
dst:- 입력 이미지와 동일한 크기의 단일 채널 출력 이미지로, 각 픽셀 값은 해당 픽셀이 주어진 히스토그램과 얼마나 일치하는지를 나타냅니다.
cv2.minShift
ret, track_window = cv2.meanShift(probImage, window, criteria)매개변수
probImage:- 역투영된 이미지 (probability image). 보통
cv2.calcBackProject함수를 사용하여 생성된 이미지입니다.
- 역투영된 이미지 (probability image). 보통
window:- 초기 추적 창(Tracking window). 추적할 객체의 초기 위치로,
(x, y, w, h)형식의 튜플입니다.x, y는 창의 좌상단 좌표이고,w, h는 창의 너비와 높이입니다.
- 초기 추적 창(Tracking window). 추적할 객체의 초기 위치로,
criteria:- 종결 기준(Termination criteria)으로, 알고리즘이 언제 멈출지 결정합니다. 예를 들어, 최대 반복 횟수나 특정 정확도 등에 도달했을 때 멈춥니다.
criteria는 일반적으로cv2.TERM_CRITERIA_EPS | cv2.TERM_CRITERIA_COUNT, max_iter, epsilon형태로 설정됩니다.
반환값
ret:- 반복 후의 Mean Shift 알고리즘 실행 결과. 반복 횟수가 반환됩니다.
track_window:- 업데이트된 추적 창(Tracking window). 최종 추적된 객체의 위치입니다.
CAMShift 알고리즘
MeanShift에서 영역의 크기가 고정되어있는 단점을 극복한 알고리즘, 지속적으로 영역의 크기를 계산해 업뎅이트 한다.
################################
ret, track_window = cv2.CamShift(dst, track_window, term_crit)
pts = cv2.boxPoints(ret)
pts = np.int0(pts)
img2 = cv2.polylines(frame, [pts], True, (0, 0, 255), 5)
################################- 기존 코드에서 CamShift로 메서드만 변경시켜주면 Camshift알고리즘을 사용할수 있다.
- 변화하는 이미지를 추적하기 위해 Rectangle 대신 PolyLine을 사용

qkdk