현제 영상 스트리밍 하며 구동 하는것까지 완료 되었으며 하드웨어 정리 후 테스트 예정(부품 기다리는 중)
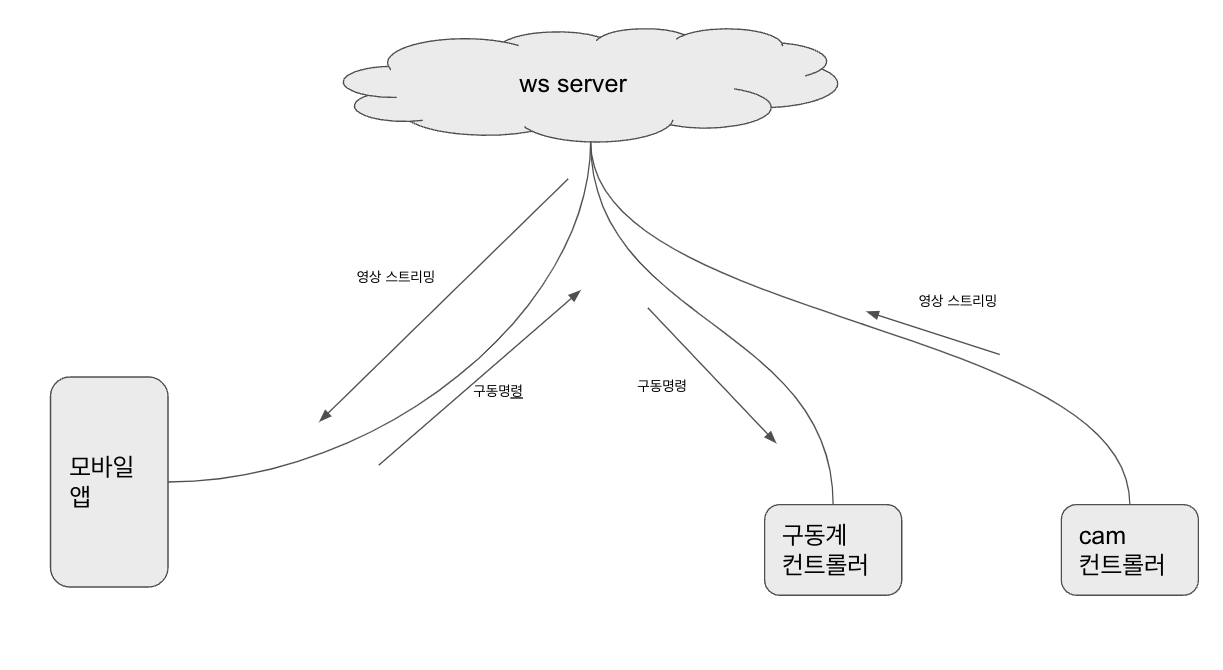
1. 아키텍처 수정
- ESP32-CAM 컨트롤러로 구동계까지 컨트롤 하려니 부하가 많이 걸리는지 영상에 딜레이가 생겨 구동계 컨트롤러에서 따로 웹소켓 통한 명령 수집
2. 기능 수정
- 매카넘 휠 장착으로 매카넘 휠을 이용한 전방 고정 이동과 평범한 이동 모드 구분
- 캡처기능 삭제 (추후 폰에 저장하도록 개발 예정)
- 구동계에서 1초이상 구동 명령을 받지 않으면 정지하도록 코드 추가(통신 에러 발생 시 조치 사항)

한 줄로는 안되지