Human keypoint - detection-
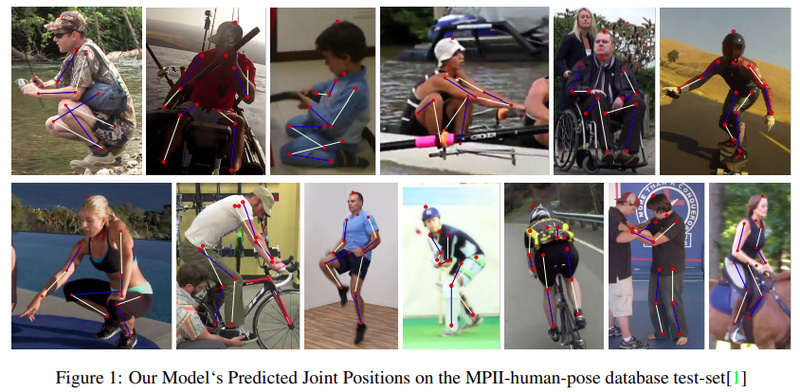
자유도가 높은 사람 동작
아래의 이미지처럼, 정말 다양하게 움직이죠? 어떻게 하면 이러한 위치 정보를 잘 따라가게 하는지 알려드리겠습니다.
Pose estimation
*변천과정
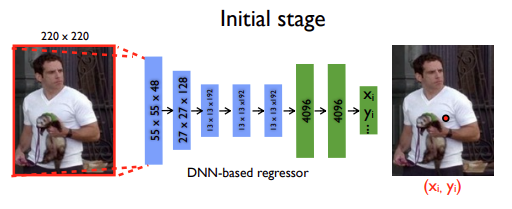
초기, 모델의 x,y좌표를 직접적으로 예측하는 position regression문제로 인식을 했고 human detection을 통해 crop된 사람 이미지를 이용해서 모델 입력 후 좌표를 출력하는 방식입니다.
Deformable parts model 논문에선 graphical tree model은 같은 이미지 두 번 연산하여 연산 효율이 떨어지고 성능이 부족한 단점이 있었습니다.
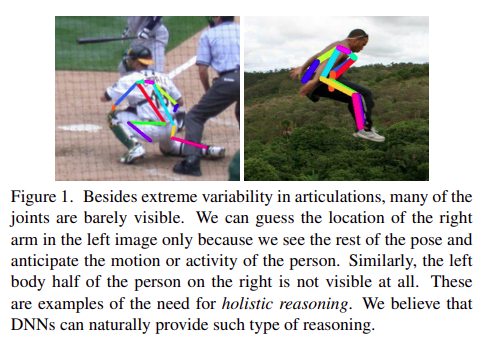
AlexNet이후 CNN이 다양한 분야에 적용이 되어 Toshev and Szegedy가 딥러닝 기반 keypoint localization모델을 제안하게 됩니다.
그로 인해, 동작의 다양성 과 invisible join문제를 언급하여 딥러닝 기반 추론 방법이 해결책이 됨을 증명했습니다.
DeepPose
이 방식은 혁신적이긴 했으나 엄청난 성능 개선을 보이진 않았습니다. 그러나, SOTA에 가까운 성능을 내면서 딥러닝을 적용한 사례입니다.
Efficient object Localization Using Convolutional Network
이 논문에선, DeepPose의 성능 개선이 잘 안되었던 이유에 대해서 이야기 하고 있다고 생각합니다.
논문에서 제안환 모델은 DeepPose보다 깊고 keypoint가 존재할 확률 분포를 학습하게 했습니다.

이 방식이 왜 좋은 성능을 보였을까요?
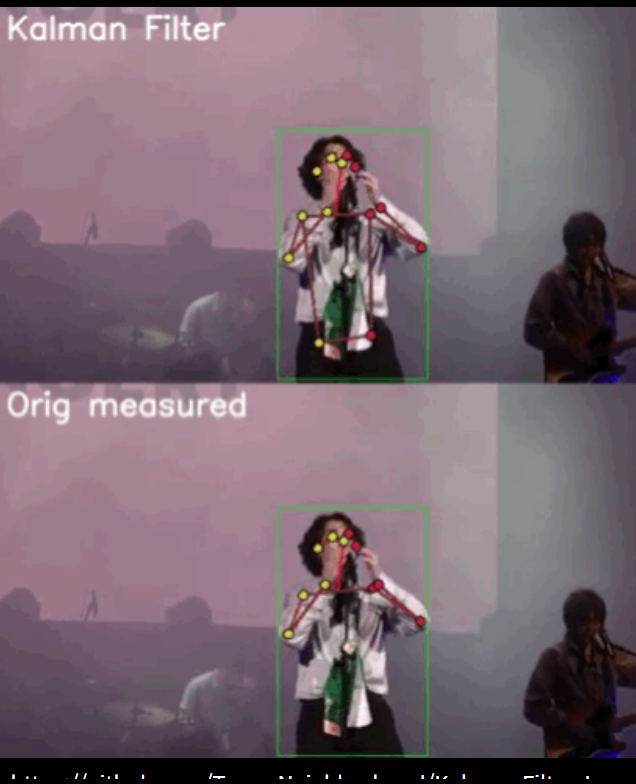
그것은, human pose(keypoint)이 항상 같은 위치의 점이 찍힐가요? 당연히 아래의 그림처럼 그렇지 않습니다.
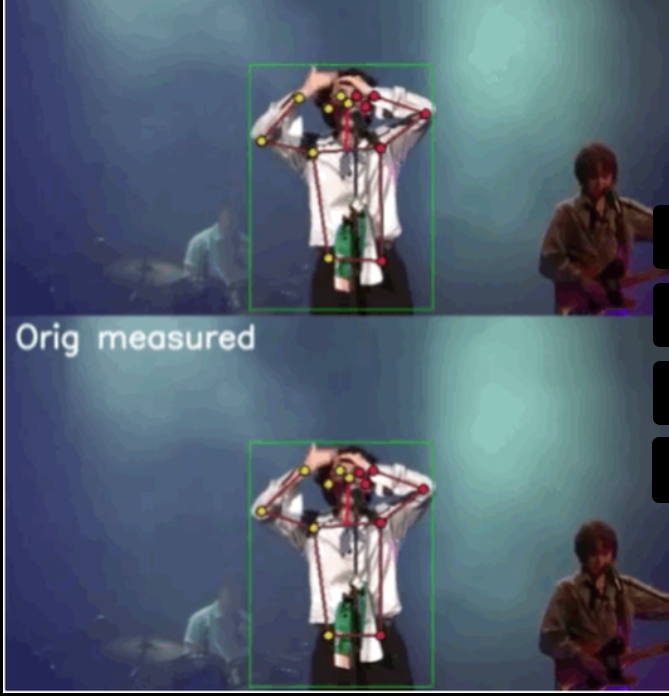
그래서, 같은 위차라고 생각하여 keypoint를 선택해도 사진마다 수 픽셀싹 차이가 생기고 있고 에러까지 더해져서 저장이 되는 거지요.
그러므로 저자는 이러한 점을 고려하여 label을 (x,y)좌표에서 (x,y)를 중심으로하는 heatmap으로 변환을 한 후 모
델 학습이 진행이 됩니다.
*제안한 모델
-
coarse model
- 32 x 32 heatmap 추출
- multi resolution 입력
- coarse heatmap기준으로 crop
-
fine model
- refinement 수행
-
두 모델
- 같은 weight 공유
- 학습이 빠름
- 메모리 저장공간 효율적 사용
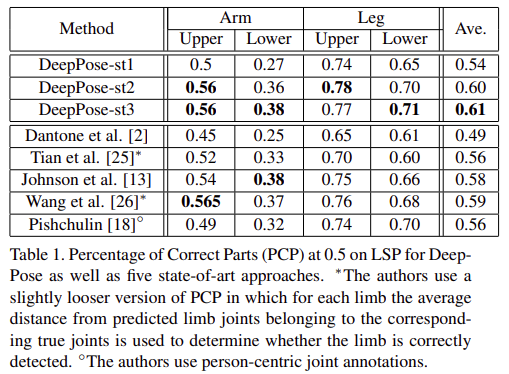
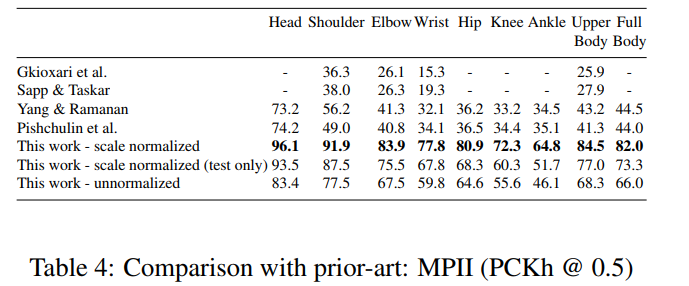
*결과
Human keypoint detection
Convolutional Pose Machines(CPM)
-
CVPR2016
-
multi-stage 구조(completely differentiable)
-
end to end
- Stage 1: image feature 계산 역할
- Stage 2: keypoint예측 역할
- g1, g2 heatmap출력하여 재사용 가능 부분
- weight sharing가능
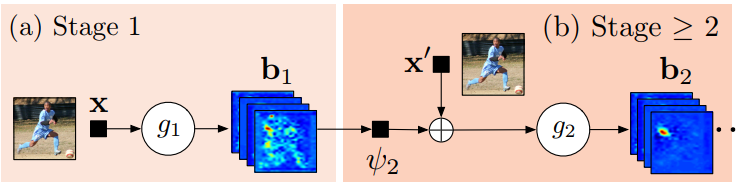
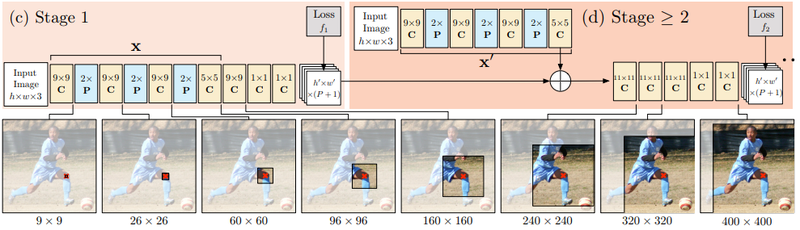
아래 그림에 대해 설명하겠습니다
-
Stage 1구조는 고정
-
보통 3개 Stage 사용
-
Stage 2부터 stage2구조 반복하여 추런
- 입력: heatmap(image feature)
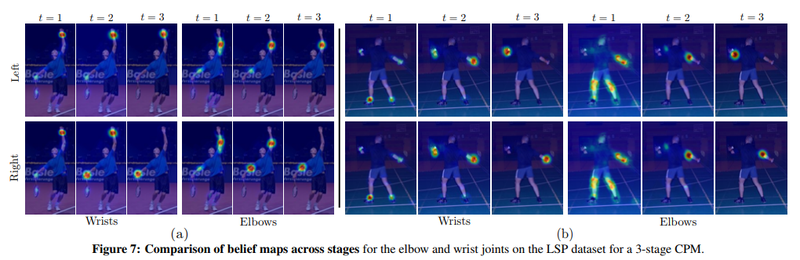
- stage단꼐 거칠수록 keypoint refined효과
-
Multi stage refinement
- 성능 개선
- receptive field넓게 만든다.
-
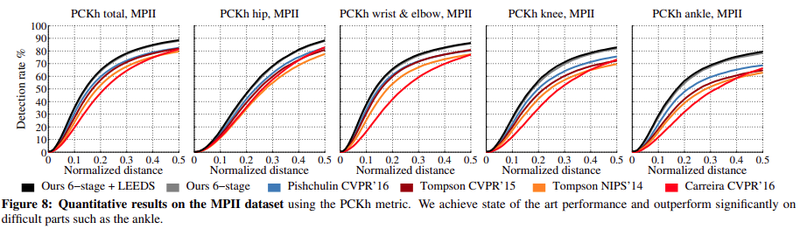
주황색 실선: Tompson알고리즘
-
검정색, 회색 실선: detection rate에서 유의미한 차이
*단점
Multi-stage방법을 사용하기에 end to end학습이 가능하더라고 그대로 학습했을 때 높은 성능을 가질 순 없습니다.
*해결책
stage단위로 pretraining 후 다시 하나의 모델로 합쳐서 학습을 합니다.
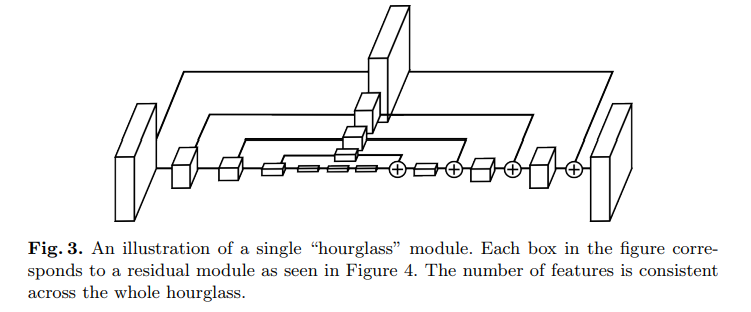
Stacked Hourglass Network
- ECCV16논문
Hourglass
-
Stacked Hourglass Network기본구조
- Conv layer와 pooling로 이미지 인코딩
- upsampling layer를 통해 feature map크기 키우기 디코딩
- feature map크기가 작아졌다 커지는 구조
기존 방식과 차이점
feature map upsampling and residual connection
-
hourglass의 핵심 novelty
-
pooling으로 image의 global feature 찾기
-
upsampling로 local feature고려
-
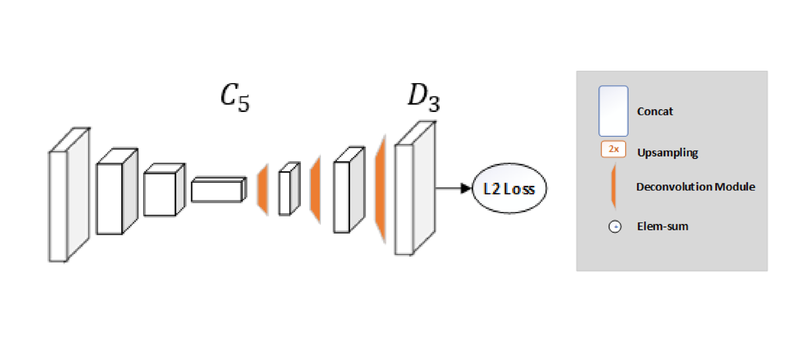
SimpleBaseline
아주 간단한 encoder-decoder구조 설계 및 Cascaded Pyramid Network이용
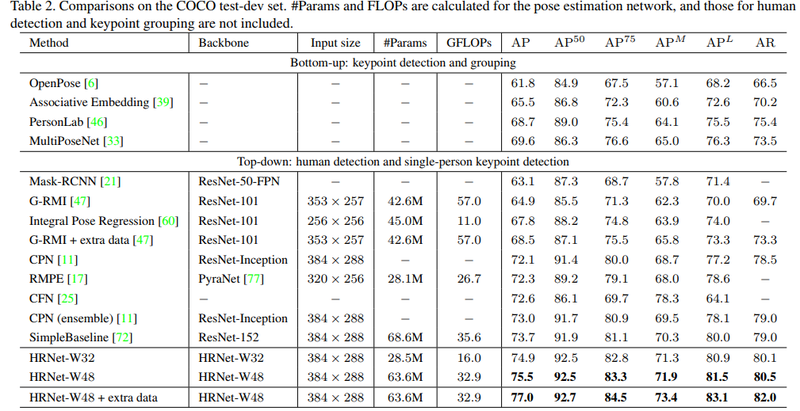
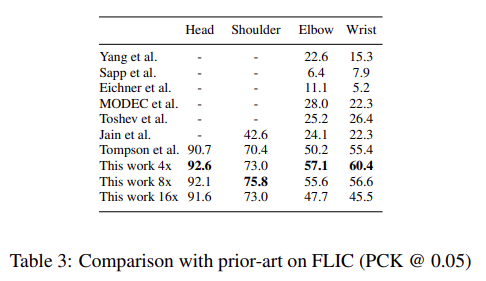
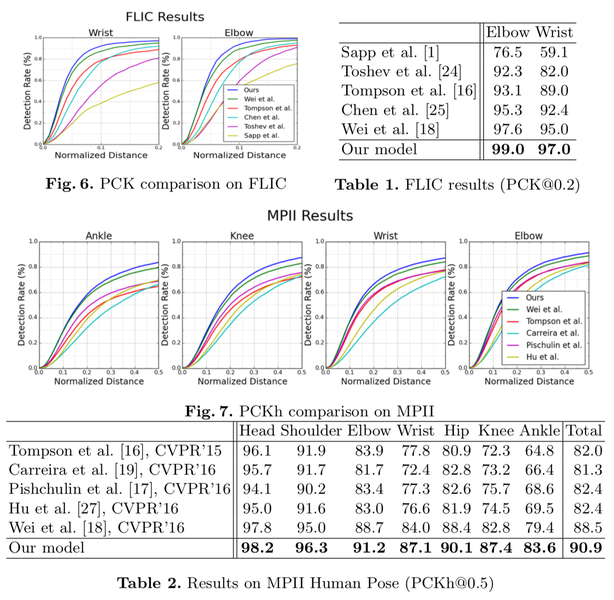
*결과

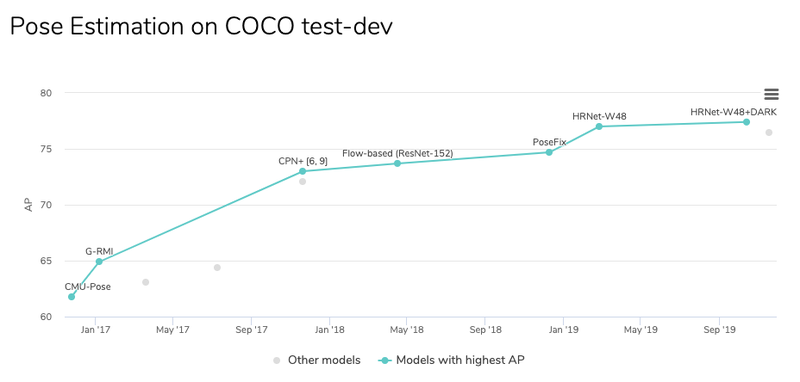
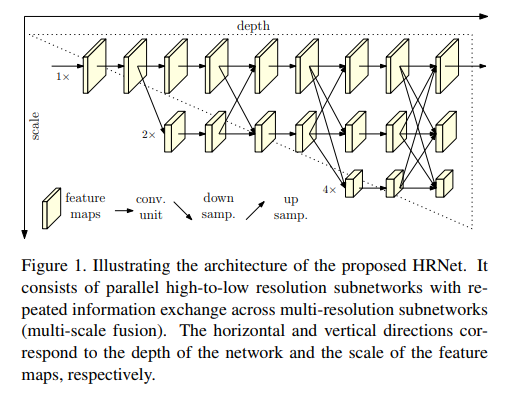
Deep High-Resolution Network(HRNet)
-
SOTA에 가장 가까운 성능을 보이는 좋은 알고리즘
-
Simplebaseline과 같은 철학 공유
-
1-stage고수(간단함을 추구)
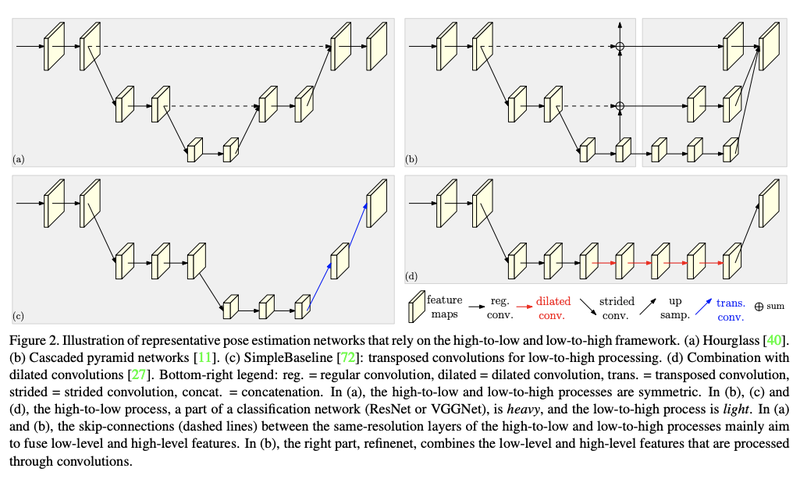
(a): Hourglass
(b): CPN(Cascaded Pyramid Networks)
(c): SimpleBaseline-transposed conv
(d): SimpleBaseline-dilated conv
Simplebaseline 공통점과 차이점
*공통점
high resolution → low resolution 인 encoder 와 low → high 인 decoder 구조로 이루어진 점
*차이점
Hpirglass는 encoder과 decoder비율이 거의 비슷함(대칭적임). 반면 Simplebaseline 은 encoder 가 무겁고 (resnet50 등 backbone 사용) decoder 는 가벼운 모델을 사용함. (a), (b) 는 skip connection 이 있지만 (c) 는 skip connection 이 없다.
skip connection사용 이유
pooling(strided conv) 할 때 소실되는 정보를 high level layer에서 사용해서 detail한 정보를 학습하기 위해 사용합니다.
*결과