Wafer Automation Defect Detection Process(한이음_프로젝트)
개요
한이음 팀프로젝트
팀 프로젝트 - 5인 개발
기간 22년 03월 ~ 22년 11월
SW총괄 담당
프로젝트 배경
Wafer Automation Defect Detection Process 프로젝트는 웨이퍼 생산 공정 중 웨이퍼 엣지부의 defect, particle, crack 등과 같은 결함을 영상처리 및 딥러닝 기술을 통해 실시간으로 찾아낼 수 있게 해주는 프로젝트입니다.
현재 꾸준한 200mm 웨이퍼에 대한 수요가 존재합니다.
그러나, 200mm 웨이퍼의 검수 과정을 검수 장비에 대한 지원이 지속적으로 이루어지지 않아 사람이 직접 육안으로 인식하는 프로세스를 수반하고 있습니다.
이로 인해 작업자의 피로와 불량 웨이퍼의 증가와 같은 문제가 발생되고 있습니다.
이를 해결하기 위해 자동 결함 검출 시스템을 구축하면 검사 비용을 절감하고 정확성을 향상할 수 있고 더 나아가, 결함 데이터를 통해 결함률을 낮추고 신뢰할 수 있는 정보를 제공하여 기업의 신뢰도를 높이 수 있습니다.
 불량 웨이퍼가 공장의 손실을 야기하는 과정 요약도
불량 웨이퍼가 공장의 손실을 야기하는 과정 요약도
수행 일정
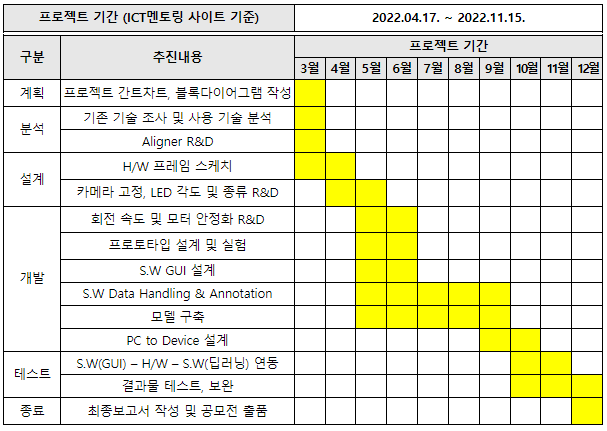 간트 차트
간트 차트
S/W 구성도
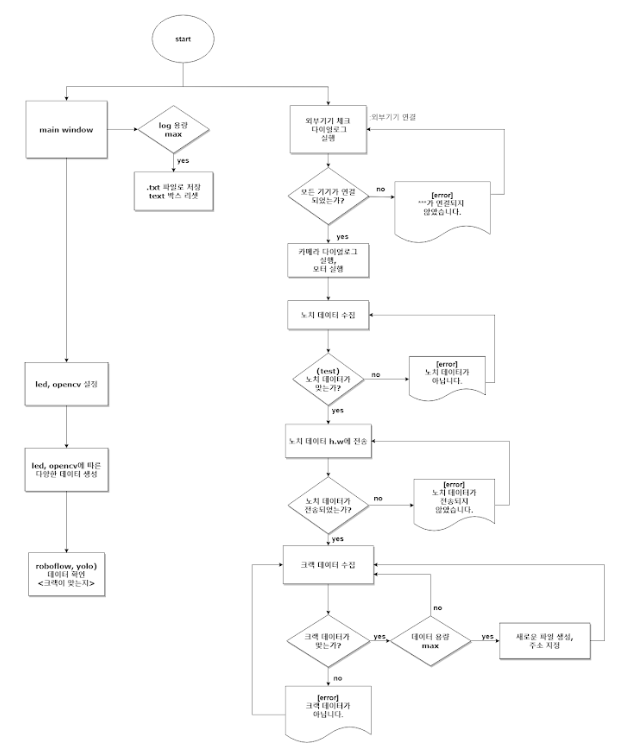 OpenCV_GUI
OpenCV_GUI
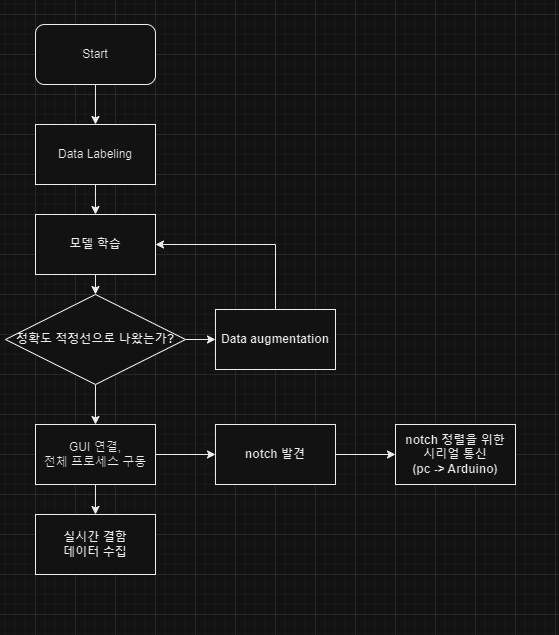 DATA_DeppLearning
DATA_DeppLearning
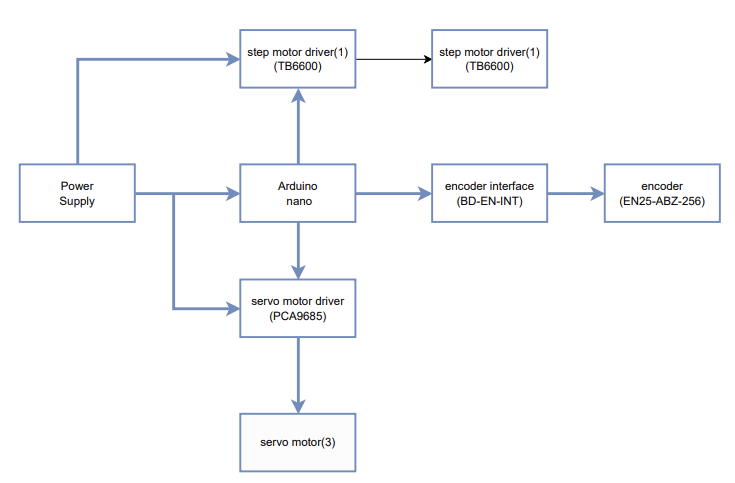
H/W 구성도
주요 기술 시나리오
-
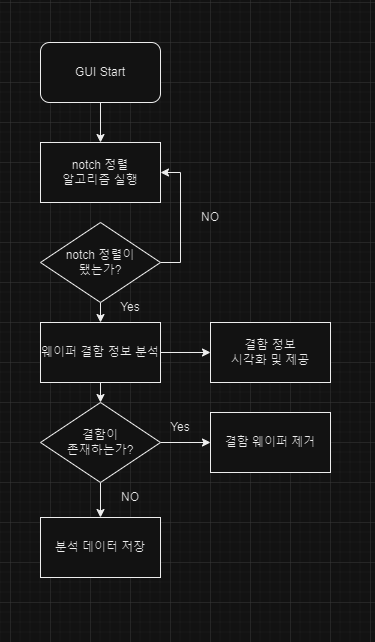
1) 사용자는 GUI를 통해 장치에 웨이퍼 카세트를 업로드 하며, 이후 시작 단추를 클릭하여 프로세스를 시작합니다.
-
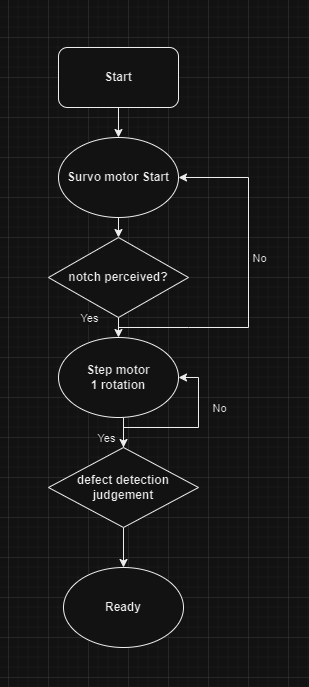
2) 각 웨이퍼에 장착된 서보모터를 활용하여 notch 정렬 알고리즘을 실행합니다.
해당 알고리즘은 웨이퍼의 notch를 상단부에 정확히 정렬시킵니다. -
3) notch가 상단부에 정렬된 이후, 웨이퍼의 결함 정보를 분석하기 시작합니다.
해당 단계에서 데이터 처리 및 딥러닝 모델을 활용하여 결함을 탐지하고 분석 합니다. -
4) 분석결과는 모니터에 표시되며, 웨이퍼의 결함 정보는 시각화되어 표현됩니다.
이를 통해 근무자는 결함이 있는 웨이퍼를 식별할 수 있습니다. -
5) 결함이 있는 웨이퍼는 근무자에 의해 식별되며, 필요한 조치를 취할 수 있습니다.
-
6) 분석된 데이터 및 결함이 있는 웨이퍼의 사진은 로그 및 디렉토리 폴더에 저장합니다.
이를 통해 데이터 추적 및 문제 해결에 도움을 줍니다.
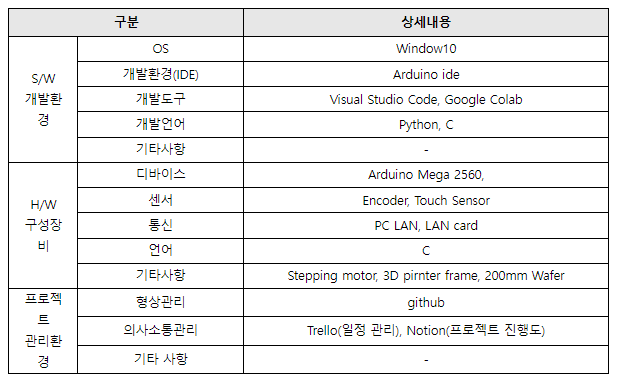
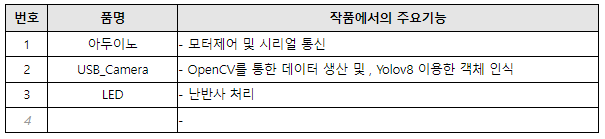
개발 환경 및 기자재
프로젝트 기능
S/W
데이터 라벨링(defect, notch)
OpenCV를 통해 데이터 확보 후 학습을 위한 defect, notch 데이터 라벨링
YOLOv5 & YOLOv8 R&D
YOLO 버전을 교체해가며 정확도 향상
딥러닝 모델 R&D
YOLO 버전 이외에 다양한 CNN 모델 R&D
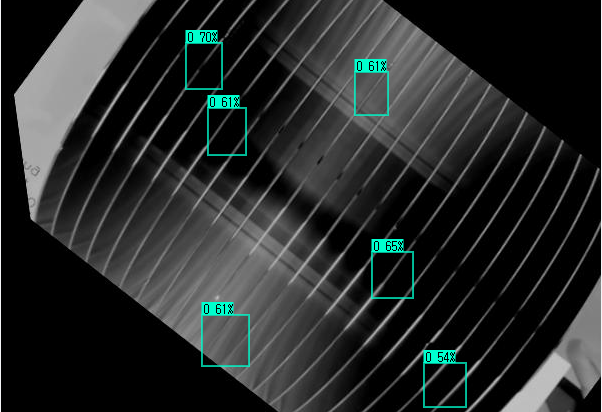
객체 인식
웨이퍼 결함 인식
GUI - 디자인 설계
제품 실용성을 높이기 위한 디자인 설계
GUI - 데이터 관리
웨이퍼 결함 데이터를 종류별, 시간별 정리
GUI - serial통신을 통한 기능활성화 및 제품 상태 확인
초기 실행단계에서 제품에 들어가는 모든 모터 정상 작동 확인 과정
H/W
프로토타입 제작
딥러닝 모델 및 배치 설계 프로토타입
프레임 설계
안정적인 웨이퍼 셋업에 필요한 기구 제작
모터 선정 및 실험
aligner led 지그 모터 선정 및 실험
led 각도 조절 지그 설계
특정 각도 3개를 구현하여 다양한 환경에 적용할 수 있도록 제작
카메라 고정부 설계
카메라 고정을 통한 일정한 데이터(높이, 너비) 확보
Wafer Aligner, 기어 부 설계
notch 정렬 알고리즘에 기반한 디자인 설계
S/W 주요 기능
YOLOv5
웨이퍼 데이터의 라벨링 작업이 완료된 후에 YOLOv5 모델을 활용하여 학습이 진행되었습니다.
데이터 품질을 향상시키기 위해 100mm 렌즈를 구입하여 새로운 데이터를 증강하였습니다.
또한, YOLOv5의 정확성을 높이기 위해 활성화 함수 및 하이퍼 파라미터를 조정해보면서 모델을 안정화시켰습니다.
 프로젝트 실물사진
프로젝트 실물사진
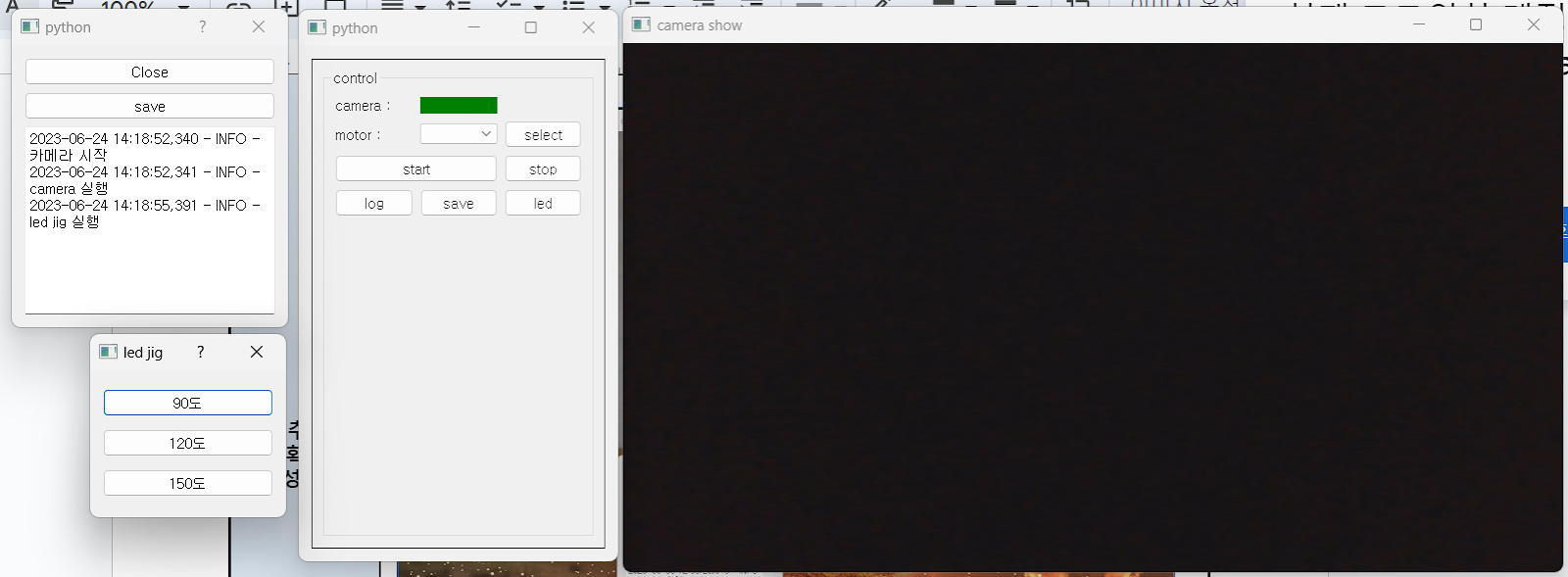
OpenCV - GUI
제작된 GUI는 PyQT를 사용하여 사용자와의 상호작용을 원활하게 할 수 있도록 설계되었습니다.
또한, 이벤트 처리를 통해 사용자 입력에 신속하게 반응하고 필요한 동작을 수행할 수 있도록 구현되었습니다.
특히, OpenCV 라이브러리를 활용하여 카메라 전용 GUI를 설계해 해당 장비의 활용성을 높였으며,
실시간으로 카메라 영상을 표시하고 다양한 이미지 처리 기능을 제공하였습니다.
로그, 모터, LED가 장착된 장비의 정상 유무를 육안으로 판단할 수 있는 시그널 GUI를 별도로 설계하였으며, 이를 통해 사용자는 장비의 작동 상태를 한눈에 확인할 수 있으며, 필요한 경우 긴급 제어 버튼을 통해 장비의 고장을 최소화할 수 있습니다.
H/W 주요 기능
웨이퍼 정렬 - 모터
노치 정렬을 위한 R&D 과정에서는 웨이퍼 각각을 서보모터를 이용하여 회전시키고, 이를 통해 영상에서 노치를 인식합니다. 노치 인식 후에는 해당 웨이퍼의 서보모터를 정지합니다.
이후, 노치를 모두 위로 고정한 상태에서 스텝 모터를 활용하여 웨이퍼를 전체적으로 회전시킵니다. 이 회전 과정을 통해 결함을 검출할 수 있습니다.
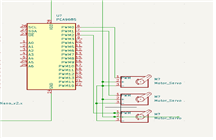
LPF 필터 설계
서보모터와 스텝모터의 노이즈 제거를 위한 LPF(Low Pass Filter)설계입니다.
대부분의 노이즈는 AC성분이므로 간단한 1차 LPF(RC필터)를 이용하여 DC, 서분만 통과시킴
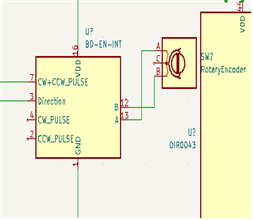
엔코더 피드백
스텝모터의 위치를 폐회로 루프를 이용하여 확인합니다.
스텝모터가 정회전과 역회전을 하며 이동하는 동안 폐회로 루프는 펄스 신호를 계산하여 현재 위치를 파악할 수 있습니다. 이를 통해 웨이퍼를 정확히 정렬 후 스텝모터의 위치를 파악할 수 있으며, 대략적으로 200mm웨이퍼를 결함 검출하기 위해 몇 바퀴 돌아야 하는지도 파악할 수 있습니다.
또한, 회전 정도에 대한 데이터를 확보하여 장비 고장에 빠른 대처가 가능합니다.
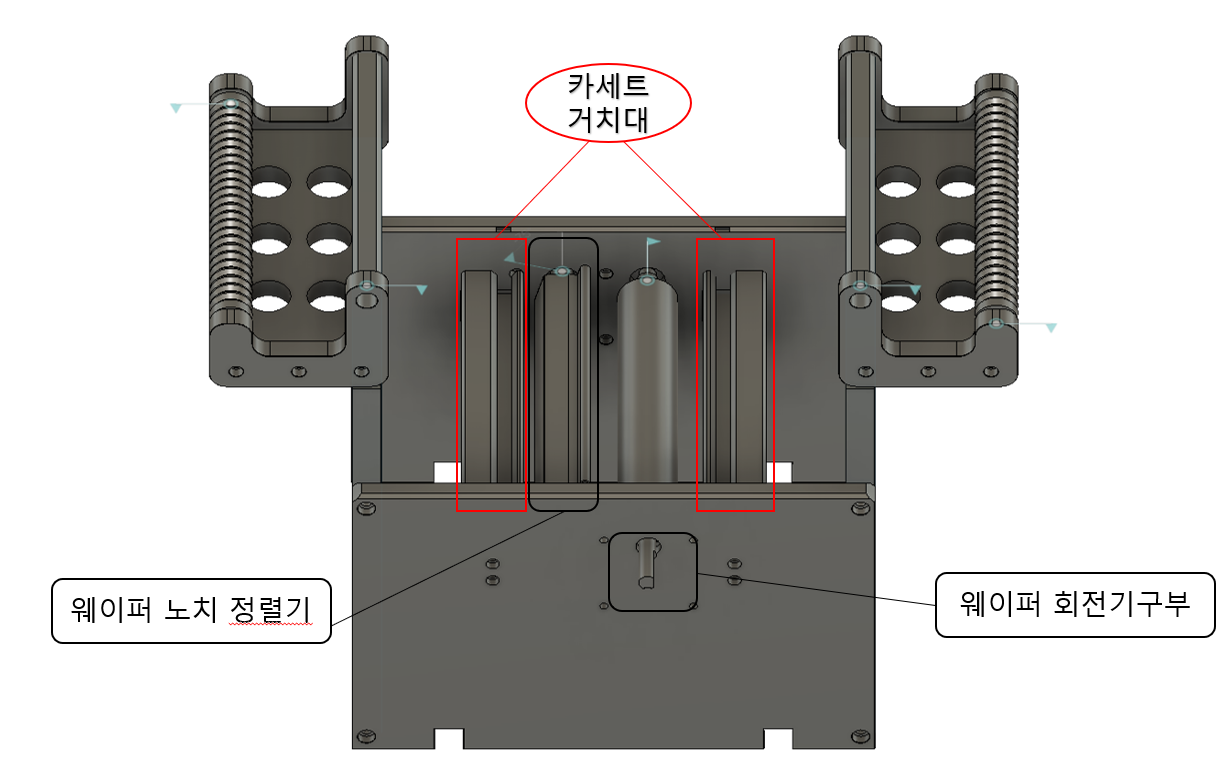
3D Modeling
제작한 기구부는 웨이퍼 카세트의 사이즈를 고려하여 디자인되었으며, 웨이퍼 카세트를 기구부에 안정적으로 얹힐 수 있도록 설계했습니다.
이 모든 과정은 Fusion360을 활용하여 설계가 이루어졌으며, 설계한 기구부는 웨이퍼 카세트의 안전한 배치와 정확한 정렬을 보장하며, 생산 공정에서 웨이퍼의 이상을 최소화하고 원활한 작업을 지원합니다.
프로젝트의 특/장점
-
1) 웨이퍼 결함 프로세스 자동화
해당 프로젝트는 웨이퍼 자동 결함 감지 프로세스 시스템으로, OpenCV라이브러리를 사용하여 웨이퍼 데이터를 수집합니다. 해당 데이터는 다양한 결함 데이터를 포함하도록 Roboflow 라벨링툴을 통해 라벨링하고 YOLO딥러닝 모델을 사용하여 웨이퍼 결함을 감지하는 시스템을 구축합니다.
이러한 시스템은 200mm 공정에서 장비 및 자원이 부족하여 작업자가 육안으로 결함을 판단하는 것을 보완하고자 개발 되었습니다. -
2) 유연한 환경에서 작동 가능
결함 감지 장비를 소형화하여 어떤 웨이퍼 공정이라도 적용할 수 있는 유연한 시스템을 개발합니다. 기존에는 특정 공정에만 한정되던 결함 감지 기능을 다른 공정에도 확장할 수 있으며, 작은 크기의 장비는 공간을 절약하여 설치 및 운영의 편의성을 높여 생산 공정에 적용하기 용이합니다.
또한, 웨이퍼 결함 검출은 주로 빛의 변화나 반사로 인해 영향을 받을 수 있는데, 이에 대한 대응으로 개발된 결함 장비는 밝거나 어두운 환경에서도 안정적으로 동작할 수 있도록 설계합니다.
센서와 조명 시스템을 최적화하여 웨이퍼의 결함을 정확하게 감지하고, 밝기 변동에 영향을 받지 않도록 합니다.
이를 통해 공정 환경의 변화에 민감하지 않고 일관된 결함 검출 성능을 유지할 수 있습니다. -
3) 결함 데이터 관리
GUI를 통해 웨이퍼의 결함 검출 데이터뿐만 아닌 모터의 회전수, 작업 시간, 결함이 발생한 시간 등 다양한 정보를 관리합니다.
GUI를 통해 수집된 데이터는 각 항목별 코드를 지정하여 저장되며 추후에 분석 및 활용할 수 있도록 합니다.
웨이퍼의 결함 검출 데이터는 각 웨이퍼에 대한 상세한 정보를 포함하며, 이를 기반으로 어떠한 결함이 발생햇는지를 파악할 수 있으며 모터의 회전수와 작업 시간은 웨이퍼 정렬 및 결함 검출 과정에서의 작업 상태를 파악하는데 도움이 되며, 결함이 발생한 시간은 문제 발생 원인을 분석하는 데 사용합니다.
문제점 및 해결방안
프로젝트 관리 측면
- 웨이퍼 관리 측면
웨이퍼에 먼지가 쌓이거나 사용 웨이퍼가 단결정 실리콘 웨이퍼이기에 임의로 결함을 만들다 쉽게 깨지는 경우가 생겼습니다. 해당 문제로 인해 재정적인 측면에서 어려움을 겪었습니다.
교내 프로젝트 및 동아리 활동을 통해 재정적인 도움을 받았습니다.
프로젝트 개발 측면
- 카메라 및 LED 고정문제
웨이퍼 데이터를 확보하기 위해 카메라와 LED를 얼라이너 장비에 직접 고정하는 과정에서 정보 습득 환경이 변동되는 문제를 발견하였습니다.
이로 인해 결함 데이터의 인식이 매번 다르게 나타나는 문제가 발생하였고, 이러한 문제를 해결하기 위해 3D프린터를 활용하여 스텝 모터와 엔코더를 배치하였으며, 이를 통해 항상 일정한 값과 지표에 카메라를 정확히 위치시킬 수 있었습니다. 데이터 인식 과정에서 변동성을 최소화하고, 결함 데이터의 일관된 인식을 가능하게 만들었습니다.
추가적인 관리 부분
1. 웨이퍼의 표면에 난반사가 잘 일어나는 각도를 설계하였습니다.
2. 웨이퍼에 비추는 빛의 종류 중 웜 화이트를 사용하여 데이터 품질을 향상시켰고,각도 조절용 지그를 이용해서 (ex : 15, 45, 60도의 LED각도를 설정) 데이터를 가공하였습니다.
3. 웨이퍼 정렬을 위해 사용된 모터의 가동 시간 및 위치를 측정하여 데이터를 정리하였습니다.
4. 웨이퍼 정렬 중에 저장된 영상 파일의 용량 기록위의 데이터 특정을 엑셀 파일로 정리하여 데이터 가공 작업을 실시하였습니다. 이를 통해 각 웨이퍼의 특징 값을 수집하고 분석하여 결함 검출 및 프로세스 개선에 활용하였습니다.
-
데이터 확보에 대한 어려움
개발 초반에는 핸드폰 카메라를 이용해 저화질 영상으로 데이터를 확보하여 특징점을 찾아는데 어려움이 있었습니다. 이를 해결하기 위해 전용 카메라를 확보하여 웨이퍼 영상을 고화질로 촬영할 수 있었고 데이터 품질을 크게 향상 시킬 수 있었습니다.
또한, 100mm 렌즈를 도입하여 확대 기능을 추가하였습니다.
웨이퍼의 세부적인 결함을 더 선명하게 기록할 수 있었으며, 선명한 영상을 통해 모델이 웨이퍼 결함들 정확하게 인식하고 분석할 수 있도록 데이터 품질을 높이는 데 큰 도움이 되었습니다. -
웨이퍼 노치 정렬을 위한 알고리즘
notch를 이용한 웨이퍼 정렬 설계 과정에서 발생한 문제에 대해 여러 가지 시도하였습니다.
초기에는 스텝 모터의 펄스 값을 조절하여 웨이퍼 정렬을 시도했으나, 이 과정에서 모터 펄스 초기값을 정확하게 읽어내지 못하는 문제가 발생하였고, 이에 대한 대안으로 엔코더를 도입하여 모터의 회전 수를 정밀하게 읽어들이는 방법을 도입하였습니다.
하지만 엔코더를 사용하여 모터의 회전 수를 읽어들여도 웨이퍼 정렬을 위한 스텝 모터의 각도를 정확하게 지정하는데 어려움을 겪었습니다.
노치 정렬을 위한 R&D 과정에서 가장 성과가 좋았던 부분은 웨이퍼 각각을 서보모터를 사용해 회전시키고, 이를 통해 영상에서 노치를 인식합니다.
노치 인식후에는 해당 웨이퍼의 서보모터를 정지하고 이후, 노치를 모두 위로 고정한 상태에서 스텝 모터를 활용해 웨이퍼를 전체적으로 회전시켜 웨이퍼 전체가 동일한 환경에서 결함을 검출할 수 있었습니다.
프로젝트의 기대효과
웨이퍼 결함(Crack, Chip, Scratch)의 데이터화로 이슈 발생원인을 파악 가능할 수 있게합니다.
데이터화된 웨이퍼 결함 정보는 이슈 발생 원인을 파악하는데 도움을 줍니다.
각각 결함 유형에 대한 데이터를 정확하게 기록하고 분석하여, 어떤 종류의 결함이 많이 발생하는지, 어떤 결함이 특정 상황에서 많이 발생하는지를 파악할 수 있습니다.
이를 통해 웨이퍼 제조 과정에서의 결함 발생 원인을 식별하고 개선하는 데 집중할 수 있습니다.
또한, 데이터화된 웨이퍼 결함 정보는 품질 관리 및 예방 조치에 도움을 줍니다.
결함 데이터를 분석하여 특정한 결함의 원인이나 패턴을 식별할 수 있으면, 이를 예방하기 위한 조치를 적용할 수 있습니다.
협소한 공정 환경에서의 소형 장비 개발을 통해 공간 절약 효과를 가져옵니다.
이는 작업 공간을 효율적으로 활용할 수 있을뿐더러 추가적인 설비나 공간 확보에 대한 비용을 절감할 수 있습니다.
