%F0%9F%93%9A.png)
우선순위 큐
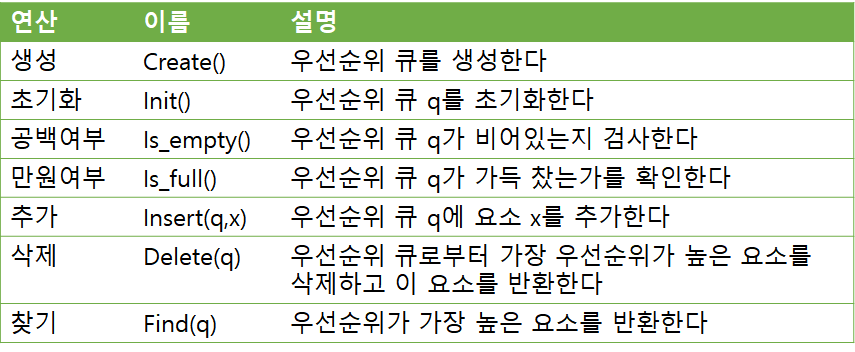
정의
- 데이터들이 우선순위를 가지고 있고 우선순위가 높은 데이터가 먼저 나가게 됨
- 부여되는 우선순위에 따라 스택이나 큐로 동작 가능
- 배열, 연결리스트, 히프로 구현 가능
- 우선순위 큐의 종류
- 최소 우선순위 큐: 가장 우선순위가 낮은 요소를 먼저 삭제
- 최대 우선순위 큐: 가장 우선순위가 높은 요소를 먼저 삭제
추상자료형
힙
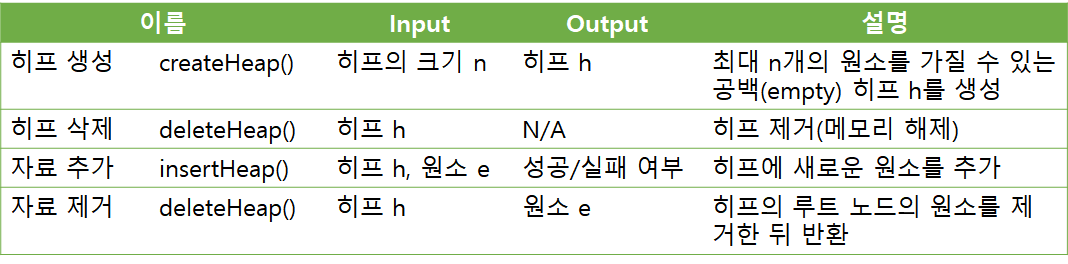
정의
- 우선순위 큐를 완전 이진 트리로 구현하는 방법
- 최솟값이나 최댓값을 쉽게 추출 가능
- 내부노드에 키를 저장하며 두 가지 속성를 만족하는 이진트리
- 힙순서 : key(v) ≥ key(parent(v))
- 완전 이진트리
- 히프의 종류
- 최소 히프(min heap): 부모 노드의 값 ≤ 자식노드의 값인 완전 이진 트리 (최소 히프의 루트 노드: 가장 작은 값을 가짐)
- 정렬 시 최소 히프의 사용 권장
- 최대 히프(max heap): 부모 노드의 값 ≥ 자식노드의 값인 완전 이진 트리 (최대 히프의 루트 노드: 가장 큰 값을 가짐)
- 최소 히프(min heap): 부모 노드의 값 ≤ 자식노드의 값인 완전 이진 트리 (최소 히프의 루트 노드: 가장 작은 값을 가짐)
- 완전이진트리: 높이 h의 완전 트리에서 레벨 1~레벨 h-1까지는 포화 이진 트리이며 레벨 h에서는 왼쪽에서 오른쪽으로 노드가 채워져 있는 이진 트리(중간에 빈 노드가 없다)
- 1차원 배열로도 구현 가능
- 배열을 이용한 완전이진트리 구현 시 응용 식
- (왼쪽 자식의 인덱스)=(부모의 인덱스)*2
- (오른쪽 자식의 인덱스)=(부모의 인덱스)*2+1
- (부모의 인덱스)=(자식의 인덱스)/2
- 힙의 마지막 노드: 깊이 (h-1)의 가장 오른쪽 내부노드
추상자료형
구현1
#include <stdio.h>
#include <stdlib.h>
#include <string.h>
#pragma warning(disable:4996)
#define TRUE 1
#define FALSE 0
typedef struct HeapElementType {
int key;
char data;
}HeapNode;
typedef struct ArrayHeapType {
int maxElementCount;//최대 노드 개수
int currentElementCount;//현재 노드 개수
HeapNode* pElement;//노드 저장을 위한 1차원 array
}ArrayMaxHeap, ArrayMinHeap;
ArrayMaxHeap* createArrayMaxHeap(int maxElementCount) {
ArrayMaxHeap* pReturn = NULL;
int i = 0;
if (maxElementCount > 0) {
pReturn = (ArrayMaxHeap*)malloc(sizeof(ArrayMaxHeap));
if (pReturn != NULL) {
pReturn->maxElementCount = maxElementCount;
pReturn->currentElementCount = 0;
pReturn->pElement = (HeapNode*)malloc(sizeof(HeapNode) * (maxElementCount + 1));
if (pReturn->pElement == NULL) {
printf("오류, 2번째 메모리 할당, createArrayList()\n");
free(pReturn);
return NULL;
}
memset(pReturn->pElement, 0, sizeof(HeapNode) * (maxElementCount + 1));
}
else {
printf("오류, 메모리 할당, createArrayList()\n");
}
}
else {
printf("최대 원소 개수는 0보다 커야 합니다\n");
}
return pReturn;
}
void insertMaxHeapAH(ArrayMaxHeap* pHeap, HeapNode element) {
int i = 0;
if (pHeap != NULL) {
if (pHeap->currentElementCount == pHeap->maxElementCount) {//히프의 크기를 초과하여 저장하는지 점검
printf("오류, 히프가 가득찼습니다 [%d], insertMaxHeapAH()\n", pHeap->maxElementCount);
}
pHeap->currentElementCount++;//현재 노드 개수를 1증가
i = pHeap->currentElementCount;//변수i는 현재 히프에서의 마지막 노드를 가르키는 위치 인덱스
while ((i != 1) && (element.key > pHeap->pElement[i / 2].key)) {//부모 노드와 키 값 비교
pHeap->pElement[i] = pHeap->pElement[i / 2];
i /= 2;
}
pHeap->pElement[i] = element;
}
}
HeapNode* deleteMaxHeapAH(ArrayMaxHeap* pHeap) {
HeapNode* pReturn = NULL;
HeapNode* pTemp = NULL;
int i = 0;
int parent = 0, child=0;
if (pHeap != NULL && pHeap->currentElementCount > 0) {//현재 반환 가능한 노드가 있는지 점검
pReturn = (HeapNode*)malloc(sizeof(HeapNode));
if (pReturn == NULL) {//반환되는 노드에 대한 메모리 할당 및 점검
printf("오류, 메모리 할당, deleteMaxHeapAH()\n");
return NULL;
}
*pReturn = pHeap->pElement[1];//루트 노드가 반환되는 노드임. 반환되는 노드의 값으로 기존 루트 노드의 값을 대입
i = pHeap->currentElementCount;//히프의 제일 마지막 위치 인덱스
pTemp = &(pHeap->pElement[i]);//히프의 제일 마지막 노드를 가리킴
pHeap->currentElementCount--;//현재 노드 개수 1개 감소
parent = 1;//루프가 시작되는 곳은 루트 노드
child = 2;//루트 노드의 왼쪽 자식 노드
while (child <= pHeap->currentElementCount) {//히프의 제일 마지막 위치에 있는 노드를 만날 때까지
if ((child < pHeap->currentElementCount)&&(pHeap->pElement[child].key<pHeap->[child+1].key)) {
child++;//왼쪽 자식노드보다 오른쪽 자식노드의 키 값이 더 크다면, 오른쪽 자식 노드가 비교 대상이 되도록 위치 인덱스 child를 수정
}
if (pTemp->key >= pHeap->pElement[child].key) {
break;//히프의 제일 마지막 노드와 현재 노드의 키 값을 비교하여 만약 마지막 노드의 키 값이 현재 노드보다 크거나 같다면 루프를 빠져 나온다. 이 위치에 삽입
}
pHeap->pElement[parent] = pHeap->pElement[child];//현재의 노드를 부모노드의 위치로 한 칸 이동
parent = child;//아래 레벨로 이동
child *= 2;
}
pHeap->pElement[parent] = *pTemp;
}
return pReturn;
}
void deleteArrayMaxHeap(ArrayMaxHeap* pHeap) {
if (pHeap != NULL) {
if (pHeap->pElement != NULL) {
free(pHeap->pElement);
}
free(pHeap);
}
}구현2
#include <stdio.h>
#include <stdlib.h>
#pragma warning(disable:4996)
#define MAX_ELEMENT 200
typedef struct {
int key;
}element;
typedef struct {
element heap[MAX_ELEMENT];
int heap_size;
}HeapType;
HeapType* create() {
return (HeapType*)malloc(sizeof(HeapType));
}
void init(HeapType* h) {
h->heap_size = 0;
}
void insert_max_heap(HeapType* h, element item) {
int i;
i = ++(h->heap_size);
while ((i != 1) && (item.key > h->heap[i / 2].key)) {
h->heap[i] = h->heap[i / 2];
i /= 2;
}
h->heap[i] = item;
}
element delete_max_heap(HeapType* h) {
int parent, child;
element item, temp;
item = h->heap[1];
temp = h->heap[(h->heap_size)--];
parent = 1;
child = 2;
while (child <= h->heap_size) {
//현재 노드의 자식노드 중 더 큰 자식노드 찾기
if ((child < h->heap_size) && (h->heap[child].key < h->heap[child + 1].key))
child++;
if (temp.key >= h->heap[child].key)
break;
//한 단계 아래로 이동
h->heap[parent] = h->heap[child];
parent = child;
child *= 2;
}
h->heap[parent] = temp;
return item;
}
int main(void) {
element e1 = { 10 }, e2 = { 5 }, e3 = { 30 };
element e4, e5, e6;
HeapType* heap;
heap = create();
init(heap);
insert_max_heap(heap, e1);
insert_max_heap(heap, e2);
insert_max_heap(heap, e3);
e4 = delete_max_heap(heap);
printf("< %d >", e4.key);
e5 = delete_max_heap(heap);
printf("< %d >", e5.key);
e6 = delete_max_heap(heap);
printf("< %d >", e6.key);
free(heap);
}힙 정렬
- 히프 정렬: 정렬할 배열을 먼저 최소 히프로 변환 다음, 작은 원소부터 차례대로 추출하여 정렬하는 방법
- 1차원 배열로도 구현 가능
구현1
#include <stdio.h>
#include <stdlib.h>
#include <string.h>
#pragma warning(disable:4996)
#define TRUE 1
#define FALSE 0
typedef struct HeapElementType {
int key;
char data;
}HeapNode;
typedef struct ArrayHeapType {
int maxElementCount;//최대 노드 개수
int currentElementCount;//현재 노드 개수
HeapNode* pElement;//노드 저장을 위한 1차원 array
}ArrayMaxHeap, ArrayMinHeap;
ArrayMaxHeap* createArrayMaxHeap(int maxElementCount) {
ArrayMaxHeap* pReturn = NULL;
int i = 0;
if (maxElementCount > 0) {
pReturn = (ArrayMaxHeap*)malloc(sizeof(ArrayMaxHeap));
if (pReturn != NULL) {
pReturn->maxElementCount = maxElementCount;
pReturn->currentElementCount = 0;
pReturn->pElement = (HeapNode*)malloc(sizeof(HeapNode) * (maxElementCount + 1));
if (pReturn->pElement == NULL) {
printf("오류, 2번째 메모리 할당, createArrayList()\n");
free(pReturn);
return NULL;
}
memset(pReturn->pElement, 0, sizeof(HeapNode) * (maxElementCount + 1));
}
else {
printf("오류, 메모리 할당, createArrayList()\n");
}
}
else {
printf("최대 원소 개수는 0보다 커야 합니다\n");
}
return pReturn;
}
void insertMinHeapAH(ArrayMinHeap* pHeap, HeapNode element) {
int i = 0;
if (pHeap != NULL) {
if (pHeap->currentElementCount == pHeap->maxElementCount) {//히프의 크기를 초과하여 저장하는지 점검
printf("오류, 히프가 가득찼습니다 [%d], insertMaxHeapAH()\n", pHeap->maxElementCount);
}
pHeap->currentElementCount++;//현재 노드 개수를 1증가
i = pHeap->currentElementCount;//변수i는 현재 히프에서의 마지막 노드를 가르키는 위치 인덱스
while ((i != 1) && (element.key < pHeap->pElement[i / 2].key)) {//부모 노드와 키 값 비교
pHeap->pElement[i] = pHeap->pElement[i / 2];
i /= 2;
}
pHeap->pElement[i] = element;
}
}
HeapNode* deleteMinHeapAH(ArrayMaxHeap* pHeap) {
HeapNode* pReturn = NULL;
HeapNode* pTemp = NULL;
int i = 0;
int parent = 0, child = 0;
if (pHeap != NULL && pHeap->currentElementCount > 0) {//현재 반환 가능한 노드가 있는지 점검
pReturn = (HeapNode*)malloc(sizeof(HeapNode));
if (pReturn == NULL) {//반환되는 노드에 대한 메모리 할당 및 점검
printf("오류, 메모리 할당, deleteMaxHeapAH()\n");
return NULL;
}
*pReturn = pHeap->pElement[1];//루트 노드가 반환되는 노드임. 반환되는 노드의 값으로 기존 루트 노드의 값을 대입
i = pHeap->currentElementCount;//히프의 제일 마지막 위치 인덱스
pTemp = &(pHeap->pElement[i]);//히프의 제일 마지막 노드를 가리킴
pHeap->currentElementCount--;//현재 노드 개수 1개 감소
parent = 1;//루프가 시작되는 곳은 루트 노드
child = 2;//루트 노드의 왼쪽 자식 노드
while (child <= pHeap->currentElementCount) {//히프의 제일 마지막 위치에 있는 노드를 만날 때까지
if ((child < pHeap->currentElementCount) && (pHeap->pElement[child].key > pHeap->[child + 1].key)) {
child++;//왼쪽 자식노드보다 오른쪽 자식노드의 키 값이 더 크다면, 오른쪽 자식 노드가 비교 대상이 되도록 위치 인덱스 child를 수정
}
if (pTemp->key < pHeap->pElement[child].key) {
break;//히프의 제일 마지막 노드와 현재 노드의 키 값을 비교하여 만약 마지막 노드의 키 값이 현재 노드보다 크거나 같다면 루프를 빠져 나온다. 이 위치에 삽입
}
pHeap->pElement[parent] = pHeap->pElement[child];//현재의 노드를 부모노드의 위치로 한 칸 이동
parent = child;//아래 레벨로 이동
child *= 2;
}
pHeap->pElement[parent] = *pTemp;
}
return pReturn;
}
void deleteArrayMinHeap(ArrayMaxHeap* pHeap) {
if (pHeap != NULL) {
if (pHeap->pElement != NULL) {
free(pHeap->pElement);
}
free(pHeap);
}
}
void heapSort(int value[], int count) {
int i = 0;
ArrayMinHeap* pHeap = NULL;
pHeap = createArrayMinHeap(8);
if (pHeap != NULL) {
for (i = 0; i < count; i++) {
HeapNode node;
node.key = value[i];
insertMinHeapAH(pHeap, node);
}
for (i = 0; i < count; i++) {
HeapNode* pNode = deleteMinHeapAH(pHeap);
if (pNode != NULL) {
value[i] = pNode->key;
free(pNode);
}
}
deleteArrayMinHeap(pHeap);
}
}
구현2
#include <stdio.h>
#include <stdlib.h>
#pragma warning(disable:4996)
#define MAX_ELEMENT 200
#define SIZE 8
typedef struct {
int key;
}element;
typedef struct {
element heap[MAX_ELEMENT];
int heap_size;
}HeapType;
HeapType* create() {
return (HeapType*)malloc(sizeof(HeapType));
}
void init(HeapType* h) {
h->heap_size = 0;
}
void insert_max_heap(HeapType* h, element item) {
int i;
i = ++(h->heap_size);
while ((i != 1) && (item.key > h->heap[i / 2].key)) {
h->heap[i] = h->heap[i / 2];
i /= 2;
}
h->heap[i] = item;
}
element delete_max_heap(HeapType* h) {
int parent, child;
element item, temp;
item = h->heap[1];
temp = h->heap[(h->heap_size)--];
parent = 1;
child = 2;
while (child <= h->heap_size) {
//현재 노드의 자식노드 중 더 큰 자식노드 찾기
if ((child < h->heap_size) && (h->heap[child].key < h->heap[child + 1].key))
child++;
if (temp.key >= h->heap[child].key)
break;
//한 단계 아래로 이동
h->heap[parent] = h->heap[child];
parent = child;
child *= 2;
}
h->heap[parent] = temp;
return item;
}
void heap_sort(element a[], int n) {
int i;
HeapType* h;
h = create();
init(h);
for (i = 0; i < n; i++) {
insert_max_heap(h, a[i]);
}
for (i = (n - 1); i >= 0; i--) {
a[i] = delete_max_heap(h);
}
free(h);
}
int main(void) {
element list[SIZE] = { 23,56,11,9,56,99,27,34 };
heap_sort(list, SIZE);
for (int i = 0; i < SIZE; i++) {
printf("%d ", list[i].key);
}
printf("\n");
}특징
- 최선, 평균, 최악:
- 히프 자료구조를 이용하여 히프에 삽입, 삭제만을 통해 정렬
- 히프 생성에 필요한 추가 메모리 필요
- 안정성 유지되지 않음

high hopes