피사계심도(DOF)
렌즈가 피사하여 받아들이는 이미지에 대해 오브젝트로 설정된 이미지가 가지는 깊이가 있을 경우
깊이가 어느정도 선 이상이 되면 잡지 못하게 되는데 이를 측정하는 척도
즉 초점이 맞은 것으로 인식되는 범위
즉, 오브젝트의 깊이가 깊은데 피사계심도가 낮을 경우, 깊이가 깊은 쪽에 속하는 물체에 관하여서는 흐린 이미지를 반환하기 때문에 원하는 이미지를 도출할 수 없을 수 있다.
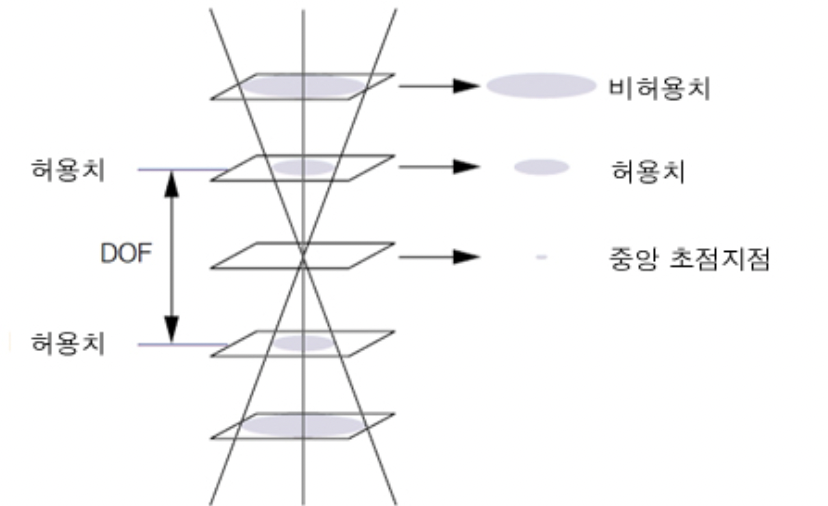
다른 의미로 한 사진의 초점이 맞은 것으로 인식되는 범위를 일컫습니다.
피사계심도를 이용한 보케(아웃포커싱) 효과는 심도를 표현하기 때문에 초점이 잡힌 거리를 광학적으로 섬세하게 구별하지만 semantic segmentation 모듈은 한계가 존재
컴퓨터 비전에서 깊이 추정은 장면에서 기하학적 관계를 보여주는 대표적인 문제로
- Depth Estimation 연구는 2D 이미지로부터 3D 복원을 수행하기 위해 합성곱 신경망 (CNN) 을 적용시도하기도한다.
- 합성곱 신경망을 이용하여 DoF 영역을 추출할 수 있는 새로운 네트워크 모델을 제안
피사계 심도 영역을 효율적인 합성곱 신경망을 통해 찾는 방법
RGB 채널기반의 상호-상관 필터를 이용하여 DoF영역을 이미지로부터 효율적으로 분류하고, 합성곱 신경망 네트워크에 학습하기 위한 데이터를 구축하며, 이렇게 얻어진 데이터를 이용하여 이미지-DoF가중치 맵 데이터 쌍을 설정합니다.
학습할 때 사용되는 데이터는 이미지와 상호-상관필터 기반으로 추출된 DoF 가중치 맵을 이용하며, 네트워크 학습 단계에서 수렴률을 높이기 위해 스무딩을 과정을 한번 더 적용한 결과를 사용합니다. 테스트 결과로 얻은 DoF 가중치 이미지는 입력 이미지에서 DoF영역을 안정적으로 찾아낸다.
DA/DA/AE