03 Optimization
bagging vs boosting
https://medium.com/analytics-vidhya/ensemble-models-bagging-boosting-c33706db0b0b
Gradient Descent Methods
- Stochastic gradient descent
: update every single sample- Mini-batch gradient descent
: update subset of data- batch gradient descent
: update whole dataBatchsize
ON LARGE-BATCH TRAINING FOR DEEP LEARNING: GENERALIZATION GAP AND SHARP MINIMA, 2017
"We have observed that the loss function landscape of deep neural
networks is such that large-batch methods are attracted to regions with sharp minimizers and
that, unlike small-batch methods, are unable to escape basins of attraction of these minimizers"i) LB는 model을 over-fit한다
ii) LB는 saddle point에 attracted된다
iii) LB는 SB에 비해 탐색이 부족하고, initial point에 가까운 minimizer에 zoom-in하는 경향이 있다.
iv) SB와 LB는 다른 minimizer에 수렴한다
*LB: Large-Batch / SB: Small-Batch
*saddle point: 안장점, 어느 방향에서보면 극대값이지만, 다른 방향에서 보면 극소값이 되는 점(wiki)
- batch size별 비교(MNIST)
- batch size / learning rate 별 비교
https://medium.com/mini-distill/effect-of-batch-size-on-training-dynamics-21c14f7a716e
※ It is known that simply increasing the learning rate does not fully compensate for large batch sizes in more complex datasets than MNIST.
Gardient Descent Method
- Nesterov Accelerated Gradient
- Adagrad
- Adadelta
- RMSprop
- Adam(Adaptive Moment Estimation)
Regularization
- Early Stopping
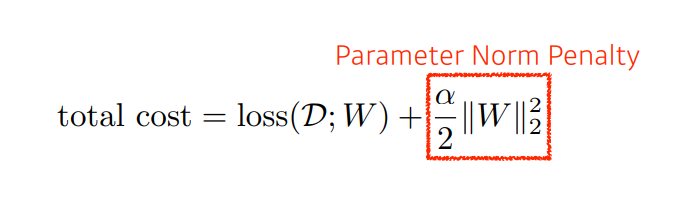
- Parameter norm penalty(weight decay)
- 파라미터가 너무 커지지 않게함
- L1(Lasso), L2(Lidge)
- add smoothness to function space
- Data augmentation
- Noise robustness
- Label smoothing
- Dropout
- Batch normalization











(03 - 실습) Optimization Methods(colab)
[기본 과제] Optimization Assignment (colab)
04 Convolution은 무엇인가?
- 최근 FC Layer를 줄이는 추세
- 파라미터가 많을 수록 generalization에 불리
- 파라미터 개수에 대한 감을 갖고 있는 것이 중요
https://towardsdatascience.com/types-of-convolutions-in-deep-learning-717013397f4d
stride
:window가 건너뛰는 크기
padding
: input의 추가 테두리
convolution Arithmeric
https://seongkyun.github.io/study/2019/01/25/num_of_parameters/
- Dense layer가 Convolution layer에 비해 더 많은 파라미터가 필요하다.
- 앞 단에 convolution layer를 깊게 쌓고, 뒷 단에 FC layer를 줄이는 추세
1x1 Convolution
- dimension reduction
- increasing depth
- reduce #parameter
- ex) bottlenect architecture




(04 - 실습) Convolutional Neural Network(colab)
05 Modern CNN - 1x1 convolution의 중요성
SOTA models
- AlexNet
- ReLU
- linear model의 성질을 보존한다
- gradient descent를 최적화하기 쉽다
- vanishing gradient문제를 해결
- 2 GPU
- Local response normalization(LRN), Overlapping pooling
- Data augmentation
- Dropout
- VGGNet
- 3x3 filter만 사용
- 1x1 convolution for fc layer
- dropout
- why 3x3 convolution?
※ 3x3을 두번한 것과 5x5를 한번한 것은 동일한 receptive field를 가짐.
*Receptive field: 하나의 feature map 값을 얻기 위해서 고려할 수 있는 input의 크기
- GoogLeNet
- NIN(network in network) 구조
- inception block
- 3x3, 5x5 convolution 전에 1x1 conv layer를 거침
- 파라미터 수를 줄일 수 있음
- 1x1 convolution은 channel-wise dimension reduction
- benefit of 1x1 convolution
- (h, w, 128) --> (h', w', 128)
- (h, w, 128) -> (h, w, 32) -> (h', w', 128)
* 약 30%의 파라미터 감소
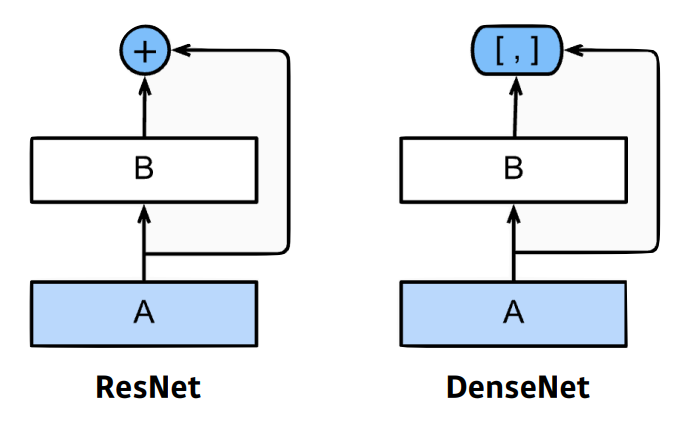
- ResNet
- identity map(skip connection)
shorcut의 차원을 맞추기위해 1x1 conv를 사용
batchnorm의 위치(논문, 사람마다 다름)
bottleneck architecture
GooLeNet과 유사
- DenseNet
- concatenate
- Dense Block
: 모든 feature map을 concatenate
: channel의 수가 기하급수적으로 증가- Transition Block
: BatchNorm -> 1x1 Conv -> 2x2 AvgPooling
: Dense Block 다음에 차원을 축소시키는 역할





06 Computer Vision Applications
Semantic Segmentation
- Fully Convolutional Network
- convolutionalization
- dense layer와 파라미터 수는 일치
- 이미지의 크기와 상관없이 사용가능
- heatmap output으로 출력할 수 있음
- Deconvolution
- FCN(Fully Convolutional Network)의 output을 이미지로 upsample하기 위해 사용됨
Detection
- R-CNN
1) takes an input image
2) extracts around 2,000 region
proposals (using Selective search)
3) compute features for each
proposal(using AlexNet)
4) classifies with linear SVMs.
- SPPNet
- CNN을 한 번 돌려서 R-CNN에 비해 빠름
- Fast R-CNN
- ROI pooling
- Faster R-CNN
- Region Proposal Network(RPN) + Fast R-CNN
- Fully Convolution Network
- YOLO
- bounding box를 뽑는 Region Proposal step이 없어서 빠름
- 이미지를 SxS grid로 나눔
- B개의 bbox를 예측
- bbox의 class와 confidence를 예측



인공지능 꿈나무