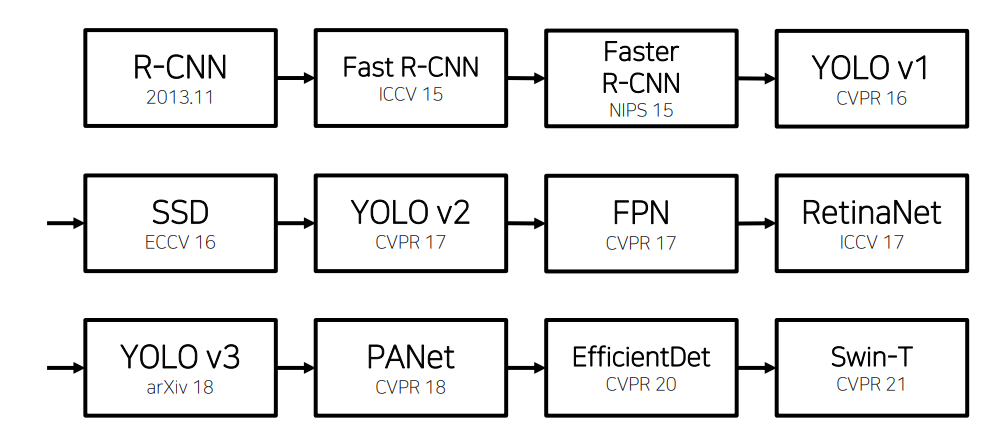
1. History
2. Evaluation
- mAP(mean Average Precision)
: 각 클래스당 AP의 평균
- Precision
:
- Recall
:
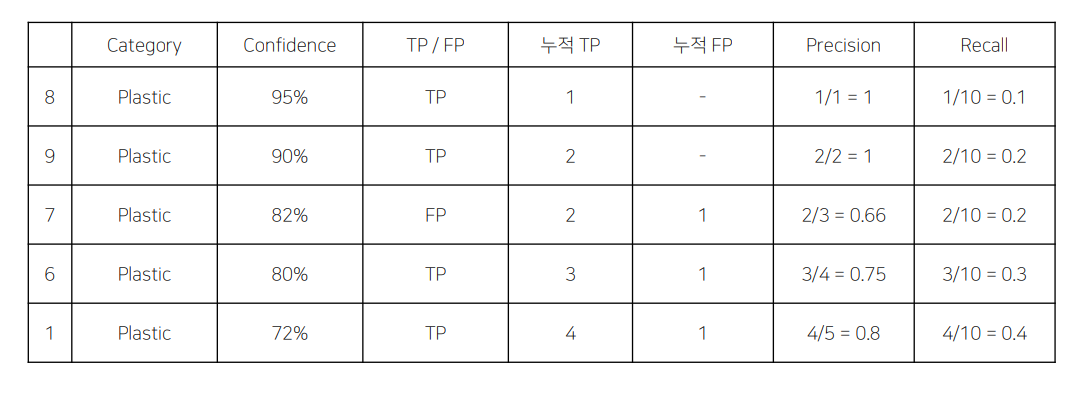
- PR Curve
: 모든 예측에 대해
confidence를 내림차순으로 정렬하여누적 Precision과누적 Recall을 구하여 그린 그래프
- AP(Average Precision)
:PR Curve의 아랫 면적 값 (0 ~ 1 사이)
- mAP(mean Average Precision)
:
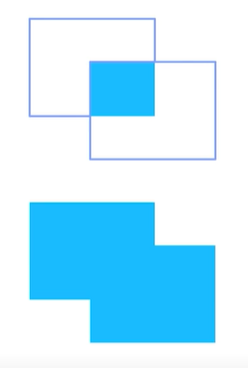
- IOU(Intersection Over Union)
:
:IOU가 일정 기준(ex 0.5) 이상일 때True라고 판정
mAP와IOU의 기준 값을 정하여 다음과 같이 사용
mAP50mAP60mAP70
...
- FPS(Frame Per Second)
: 초당 처리할 수 있는 이미지 숫자. 클 수록 모델이 빠름
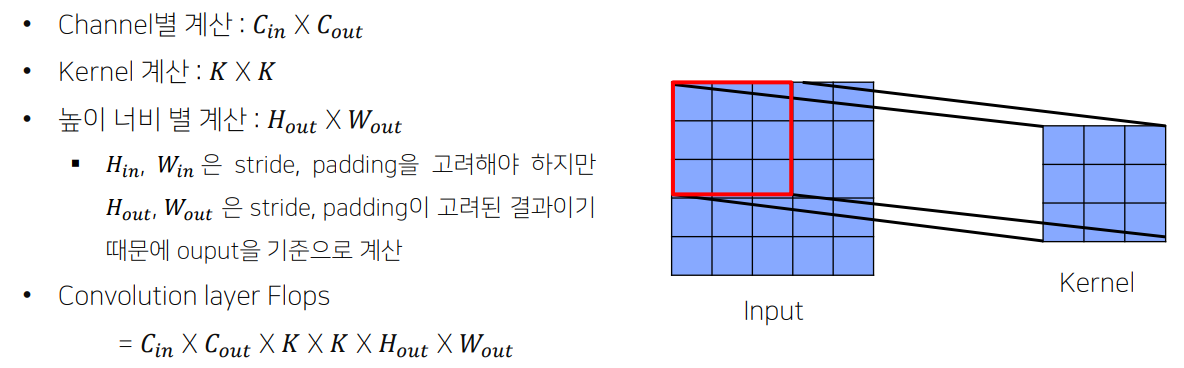
- FLOPs(Floateing Poing opertaions)
: model이 얼마나 빠르게 동작하는지 측정하는 metric
: 연산량 횟수(+,*,-등)


3. Library
- MMDetection
: pytorch 기반 object detection 오픈소스
:MMCV,MMClassification,MMDetection3D,MMSegmentation등이 있음
- Detectron2
: 페이스북 AI 리서치의 라이브러리
:Object Detection과Segmentation알고리즘을 제공
- YOLOv5
: coco 데이터셋으로 사전학습된 모델
- EfficientDet
: Google Research & Brain에서 연구한 모델로 EfficientNet을 응용해 만든 Detection 모델
: Tensorflow, pytorch 가능
4. Models
4.1 R-CNN
1. input image
2. Extract Region Proposals(selective search),2000개의 RoI추출
3. warp(RoI를 동일한 크기로 맞춰줌)
4. CNN(AlexNet)4096dim feature추출
5. SVM에서class와confidence score예측
6. CNN feature를regression을 이용해bbox예측
- Training
- Ground truth: positive samples
IoU < 0.3: negative samples- Positive samples 32, negative samples 96
- Hard negative mining:
Hard negative: False negative
배경으로 식별하기 어려운 샘플들을 강제로 다음 배치의 negative sample로 mining하는 방법
- R-CNN의 한계점
- CNN의
입력크기가 고정되어 있음 - 이미지를 고정된 크기로 자르거나(crop) 비율을 조정(warp)해야함RoI마다 CNN통과- 하나의 이미지에 대해서 2000번의 CNN을 통과해야함
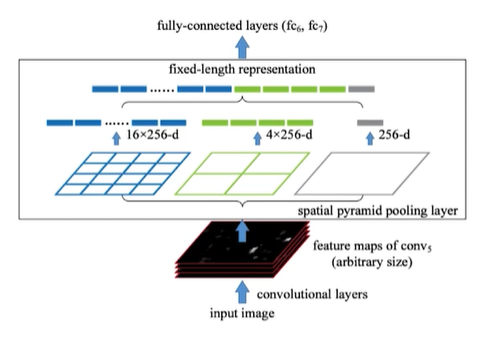
4.2 SPPNet
한 번의 CNN연산 후 2000개의 Region을 추출- CNN을 통과한 feature map에서
region proposal(ex. selective search)을 적용하여 RoI 추출warp를spatial pyramid pooling으로 대체
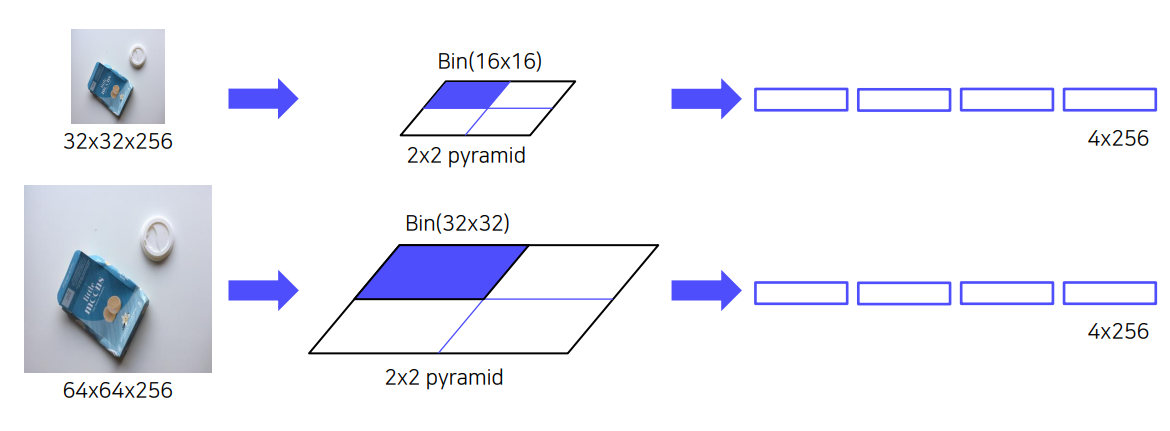
- Spatial Pyramid Pooling
- cnn에서 얻은
feature map에서 2000개의RoI를 추출하고feature map에 다양한 사이즈의pooling을 적용한 후concat하여 동일한input size를 만듦- ex.
window size와stride를RoI크기에 맞게 조정해줌으로써 같은 크기의feature를 얻을 수 있음.
참고블로그

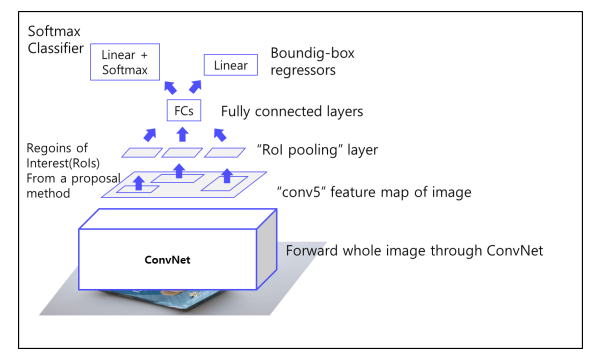
4.3 Fast R-CNN
CNN-RoI Projection-RoI Pooling-FC-prediction- VGG-16 사용
- 원본이미지에서 얻은 RoI를
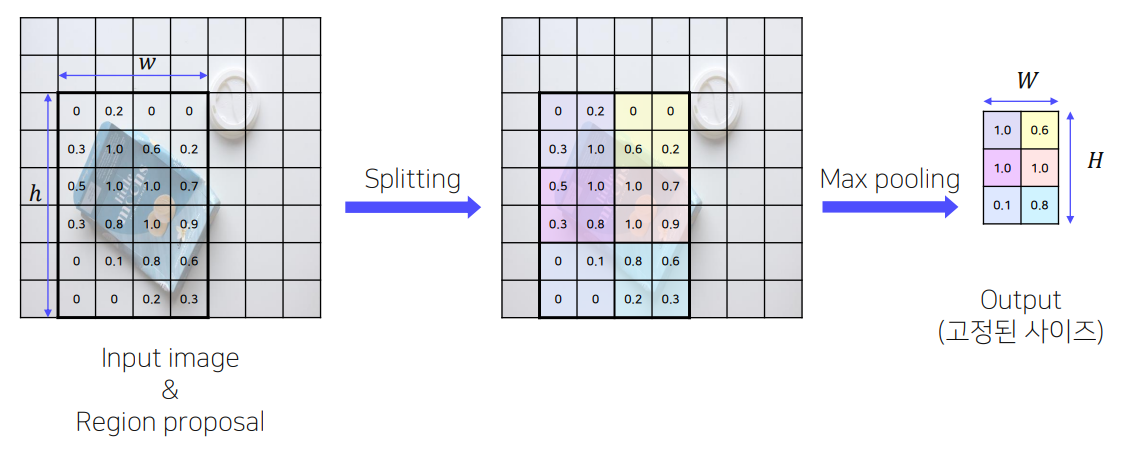
RoI Projection을 통해feature map에 적용RoI Pooling
:SPPNet의spatial pyramid pooling과 비슷함
: 한 사이즈로만pooling을 한다는 점이 다름
RoI Pooling의 결과를FC layer에 feeding하여class와bbox를 예측
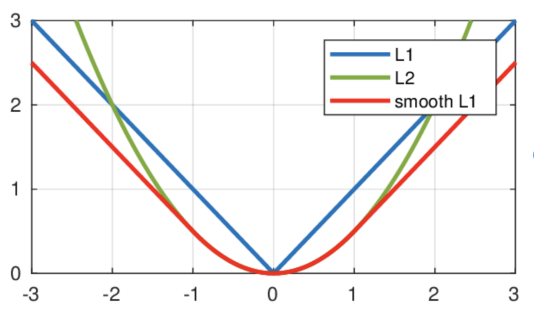
- multi task Loss 사용
- classification(
Cross entropy)- BB regressor(
Smooth L1): outlier에 덜 민감
- Dataset 구성
IoU > 0.5: positive samples0.1 < IoU < 0.5: negative samples- positive samples 25%, negative samples 75%
- sampling:
R-CNN의 경우 이미지에 존재하는 RoI를 전부 저장해 사용해서한 배치에 서로 다른 이미지의 RoI가 포함됨Fast R-CNN의 경우한 배치에 한 이미지의 RoI만을 포함- 한 배치 안에서 연산과 메모리를 공유

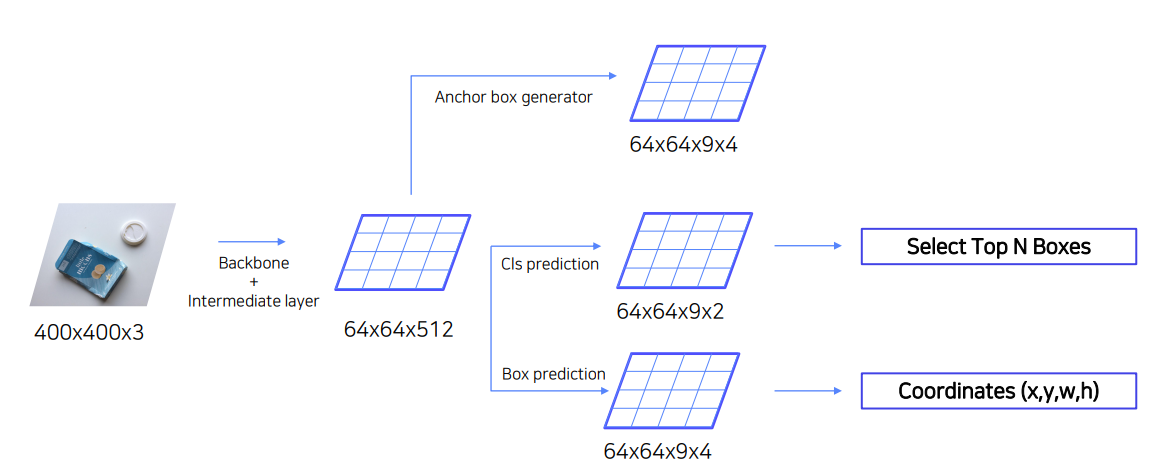
4.4 Faster R-CNN
Selective Search를RPN(Region Proposal Network)로 대체CNN(한번만사용)-RPN을 통해 RoI계산, Anchor boxAnchor box
:CNN으로 얻은feature map에서cell(x개)마다 개의anchor box를 만듦
RPN:
anchor box가object를 포함하고 있는지 여부()와 위치를 미세조정(regression)하는 역할
: class score를 얻기 위해 feature map에1x1 conv연산을 적용
:object포함 여부를 위해channel은 2(True/False) x 9(anchor box)로 설정
:bbox 위치를 얻기위해channel은 4(w,h,x,y) x 9(anchor box)로 설정
:RPN은class score를 반환함
: 유사한
NMS(Non Maximum suppression)RPN Proposals를 제거하기 위해 사용
:class score기준으로 proposals 분류
:IoU가 0.7 이상인 proposals 영역들은 중복된 영역으로 판단한 뒤 제거
Training
IoU > 0.7orhighest IoU with GT: positive samplesIoU < 0.3: negative samples그 외는 학습데이터로 사용 안함IoU > 0.5: positive samples → 32개IoU < 0.5: negative samples → 96개- 128개의 samples로 mini-bath 구성
4 steps alternative training활용 매우 복잡해서 최근에는Approximate Joint Training활용
Loss
: : 번 째
anchor box가 객체를 포함하고 있는지 아닌지에 대한 인덱스 지표(객체포함:1, 안포함:0)
: , 즉, 객체를 포함하고 있는anchor box만regression을 수행함


인공지능 꿈나무