1. Interface
-
정의: ROS에서 노드 사이의 데이터 통신 시, 사용되는 데이터 타입
-
종류
- Topic - .msg
- Service - .srv
- Action - .action
-
특징
-
보통 여러개의 패키지를 가지는 경우가 대다수이기에, 별도의 인터페이스 패키지를 생성하여 사용하는 것을 추천
-
std_msgs, geometry_msgs 등과 같이 미리 선언된 인터페이스 사용가능
from std_msgs.msg import String msg = String() msg.data = "string" -
필요에 따라 인터페이스를 커스텀하여 사용 가능
$ mkdir <workspace>/<pkg_name>/<msg/srv/action># message.msg 파일 내용 float32 num string text
-
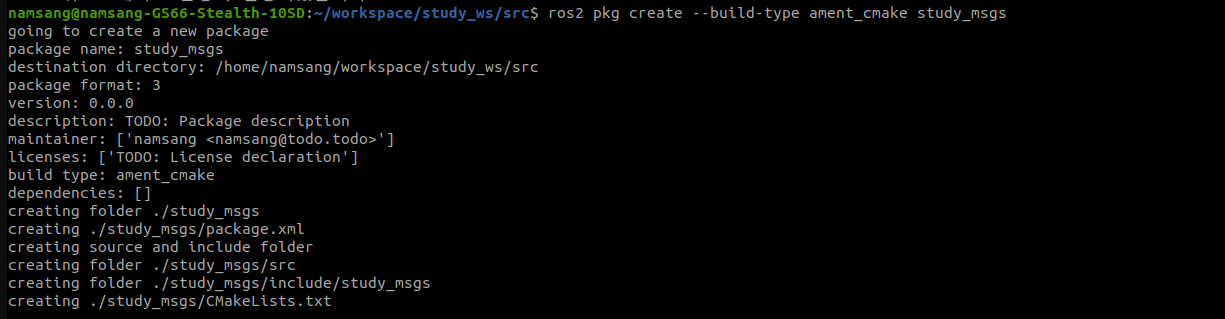
2. Interface package 생성
- 주의점
- 각 인터페이스에 해당하는 폴더 생성
- 해당 폴더 내에 파일 생성, camel-case를 적용하여 생성
- 파일의 첫문자가 소문자일 경우 빌드 시 오류 발생
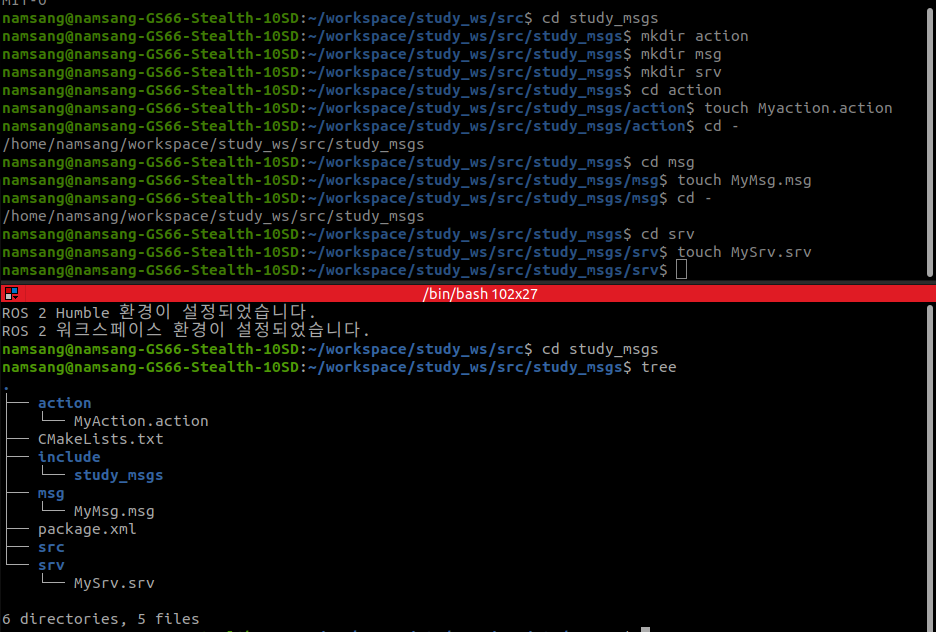
2.1 msg, srv, action 파일 작성
- 아래의 파일 작성 후, package.xml과 CMakeLists.txt 파일에서 해당 파일들을 참조하도록 수정 필요
2.1.1 MyMsg.msg
# MyMsg.msg
int32 id # 고유 id
string name # 텍스트 정보 저장(센서의 이름등)
float32 value
# float32[] values : 여러 수치 데이터 집합 표시2.1.2 MySrv.srv
- 요청과 응답 분리 --> '---'
# MySrv.srv
# Request
float32 req
---
# Response
float32 res2.1.3 MyAction.action
- 요청과 응답 분리 --> '---'
# Goal
float32 go
---
# Result
float32 res
---
# Feedback
string[] str3. package.xml 수정
<buildtool_depend>ament_cmake</buildtool_depend>
<buildtool_depend>rosidl_default_generators</buildtool_depend>
<exec_depend>buildtool_interfaces</exec_depend>
<exec_depend>rosidl_default_runtime</exec_depend>
<member_of_groups>rosidl_interface_packages</member_of_groups>위의 코드를 package.xml 파일에 추가한다. 각 코드의 기능을 설명하도록 하겠다.
-
<buildtool_depend>ament_cmake</buildtool_depend>: CMake ROS2 패키지 빌드 도구 -
<buildtool_depend>rosidl_default_generators</buildtool_depend>
: ROS2의 인터페이스 파일을 자동으로 생성하는 데 필요한 도구 -
<exec_depend>buildin_interfaces</exec_depend>
: ROS2 패키지 실행에 필요한 의존성 정의 -
<exec_depend>rosidl_default_runtime</exec_depend>
: ROS2 메시지를 사용하기 위해 런타임에 필요한 의존성 정의, 생성된 인터페이스 실행 시 필요 -
<member_of_groups>rosidl_interface_packages</member_of_groups>
: 패키지의 그룹을 정의 -
rosidl(ROS interface Definition language)
- 인터페이스 정의: msg,srv,action의 형식 및 구조 정의
- 자동 코드 생성
- 구문 검사
- 다양한 언어 지원
| name | explanation |
|---|---|
| rosidl_default_generators | .msg, .srv, .action 파일에서 C++ 및 Python 클래스를 생성 |
| rosidl_interface_packages | ROS 2에서 인터페이스 패키지들을 관리하기 위한 메타 패키지 여러 인터페이스 패키지들을 통합하여 관리하는 데 사용 |
| rosidl_default_runtime | ROS 2에서 정의된 메시지, 서비스, 및 액션 인터페이스의 런타임 지원을 제공하는 패키지 |
4. CMakeLists.txt 수정
find_package(builtin_interfaces REQUIRED)
find_package(rosidl_default_generators REQUIRED)
set(msg_files
"msg/MyMsg.msg")
set(srv_files
"srv/MySrv.srv")
set(action_files
"action/MyAction.action")
rosidl_generate_interfaces(${PROJECT_NAME}
${msg_files}
${srv_files}
${action_files}
DEPENDENCIES builtin_interfaces
)find_packages: CMake에서 다른 패키지를 찾아서 사용할 수 있도록 하는 명령어
-REQUIRED: 해당 패키지가 필수임을 나타내어 패키지를 찾지 못하면 오류 발생set: 각 인터페이스 파일의 경로 지정, 파일 경로를 리스트 형으로 정의rosidl_generate_interfaces: 인터페이스 파일로부터 python 클래스를 자동 생성builtin_interfaces: time, duration, string 등의 메시지 형식이 정의되어 있음
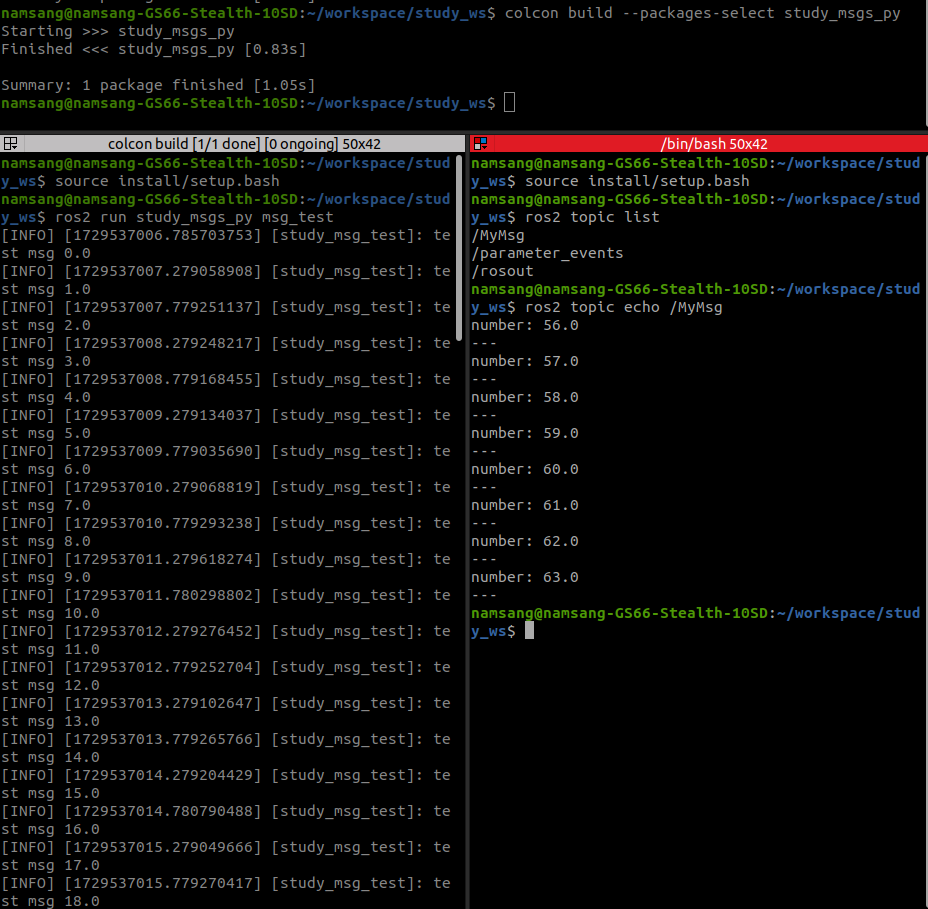
5. build

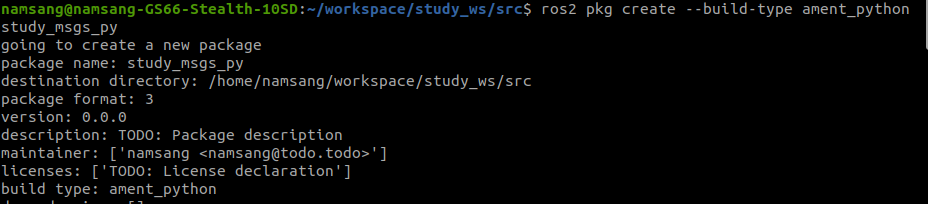
6. new package 생성
study_msg_test.py 작성
import rclpy
from rclpy.node import Node
from rclpy.qos import QoSProfile
from study_msgs.msg import MyMsg
class study_msg_test(Node):
def __init__(self):
super().__init__("study_msg_test")
qos_profile = QoSProfile(depth=10)
self.publisher_ = self.create_publisher(MyMsg, 'MyMsg', qos_profile) # 수정된 부분
self.timer = self.create_timer(0.5, self.timer_callback)
self.i = 0.0
def timer_callback(self):
msg = MyMsg()
msg.number = self.i
self.publisher_.publish(msg)
self.get_logger().info('test msg %s', self.i) # 수정된 부분
self.i += 1
def main(args=None):
rclpy.init(args=args)
study_msg_test_publisher = study_msg_test()
rclpy.spin(study_msg_test_publisher)
study_msg_test_publisher.destroy_node()
rclpy.shutdown()7. package.xml, setup.py 수정
<depend>study_msgs</depend>위 코드를 추가하여 인터페이스 패키지를 빌드 및 실행 시 사용하도록 설정
8. 빌드 및 실행