1. 로봇이란
1.1 로봇의 정의
- 기계적 장치: 프로그래밍된 지시에 따라 특정 작업을 자동으로 수행하는 기계적 장치
- 특정 목적 달성: 센서, 제어장치, 구동 장치 등을 포함하며, 물리적 세계와 상호작용하면서 특정 목적을 달성하기 위해 설계된 기구
- 산업분야 분류: 3개 이상의 액추에이터를 가지고 동작을 하는 기기
- 한국 표준 규격: 자동 제어에 의한 매니퓰레이션 기능 또는 이동기능을 가지며, 각종 작업을 프로그램에 의하여 실시할 수 있고, 산업에 사용되는 기계
1.2 로봇의 분류
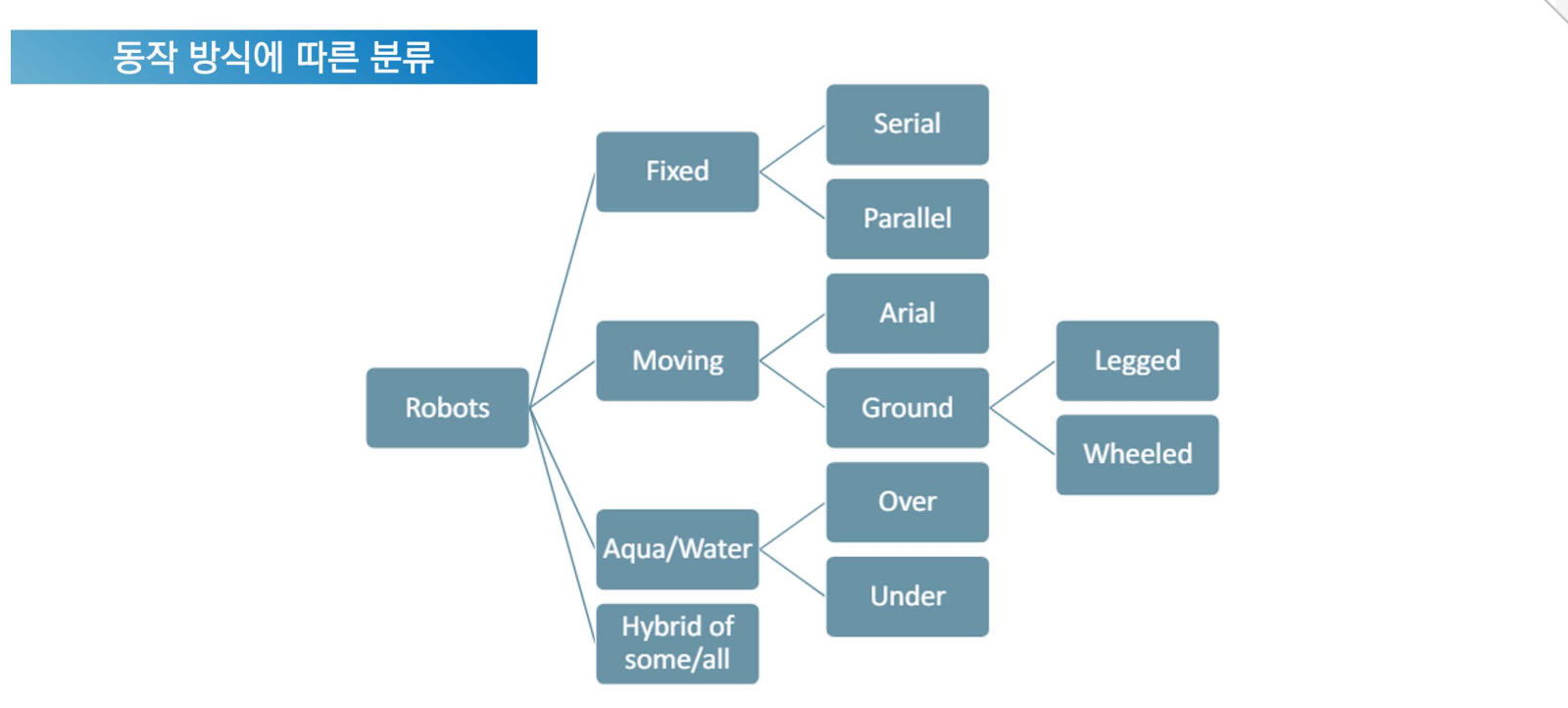
1.2.1 동작 방식에 따른 분류
1.2.2 사용 용도에 따른 분류

1.2.3 주요 로봇의 종류
-
산업용 로봇
- 공장에서 생산, 조립, 용접, 페인팅 등의 작업을 수행하는 로봇
- 수직 다관절 로봇(인간의 팔과 유사한 구조)

-
서비스 로봇
- 인간을 돕기 위한 목적으로 설계된 로봇
- 산업용 로봇과 구분되어 제조업 이외의 분야로 응용분야가 확장된 로봇
- 개인서비스로봇(가사지원, 교육, 실버케어, 엔터)
- 전문서비스 로봇(필드로봇, 청소, 검사 및 유지보수, 국방, 물류 등)
서비스로봇
-
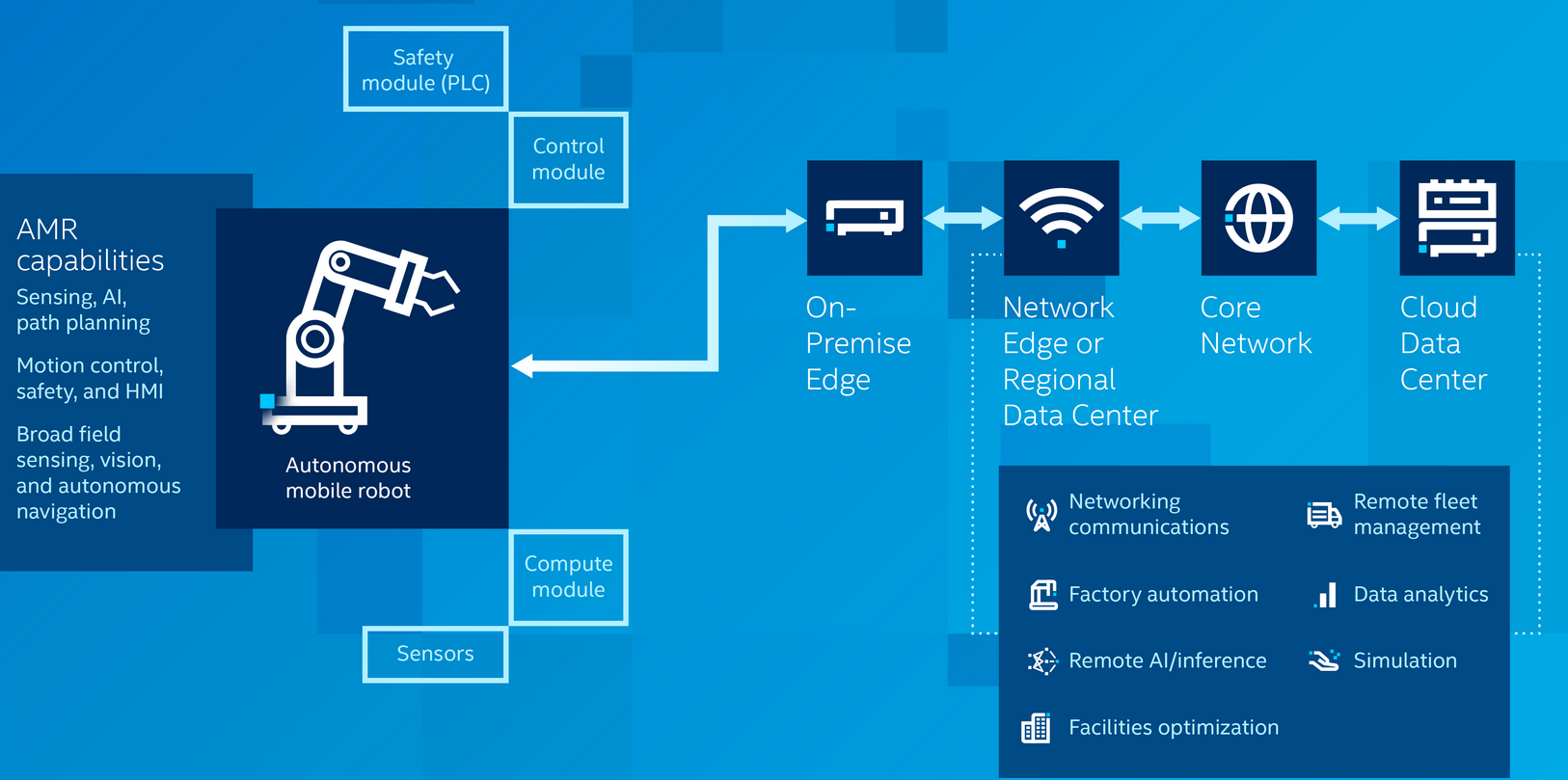
자율 이동 로봇(Autonomous Mobile Robot, AMR)
- 자율적으로 이동하면 임무를 수행하는 로봇
- 독립적으로 환경을 이해하고 이동하는 로봇 --> ML, AI 등의 경로 계획을 위한 컴퓨팅 기법 활용
- 카메라와 센서를 활용하여 객체 인식 후 경로 탐색 기술을 통해 로봇의 움직임을 명령
- 자율주행 자동차나 드론, 자율 뮬류 로봇 등
- AGR(Autonomous Guide Robot)
- AMR에 앞서 개발되어 경로 안내를 위한 유도선, 장치를 통해 신호를 교환하며 운행
- RGV(Rail Guided Vehicle)
- LGV(Laser Guided Vehicle)
- 의료 로봇
- 수술 보조, 환자 케어 및 의료 서비스 제공
- 수술로봇/수술 시뮬레이터/재활로봇/기타 의료로봇
- 휴머노이드 로봇
- 인간의 형태를 모방한 로봇으로 인간과 유사한 동작을 수행하는 로봇
- 5대 핵심기술 --> 인공지능/배터리/그리퍼/보행능력/센서
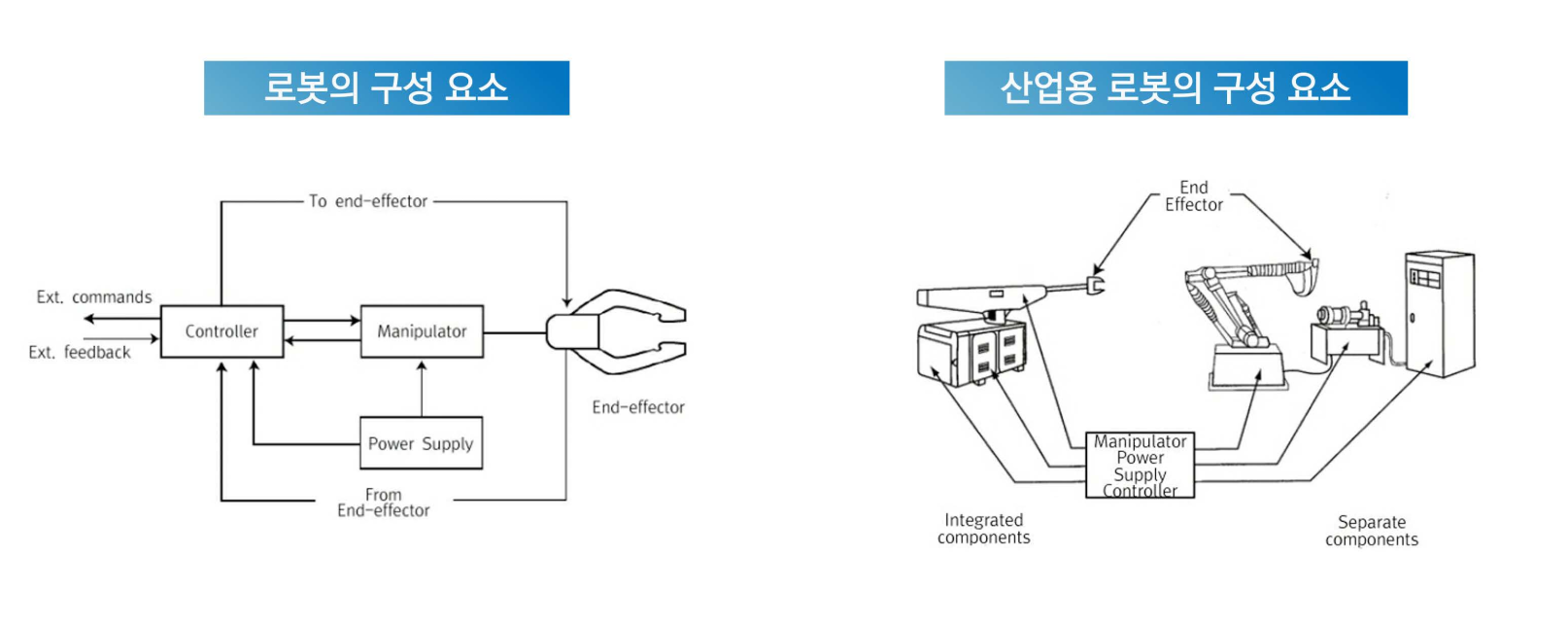
1.3 로봇의 구성요소
- 기구부: 프레임, 하우징, 바퀴, 바퀴축, 베어링, 기어, 벨트, 말단효과장치 등
- 하드웨어부: 컴퓨터, 제어기, 전원관리 보드, 모터, 센서 등
- 소프트웨어부: 하드웨어 제어프로그램(모터제어, 센서 입출력), 운영체제, 응요 소프트웨어 등
2. 로보틱스 기초 이론
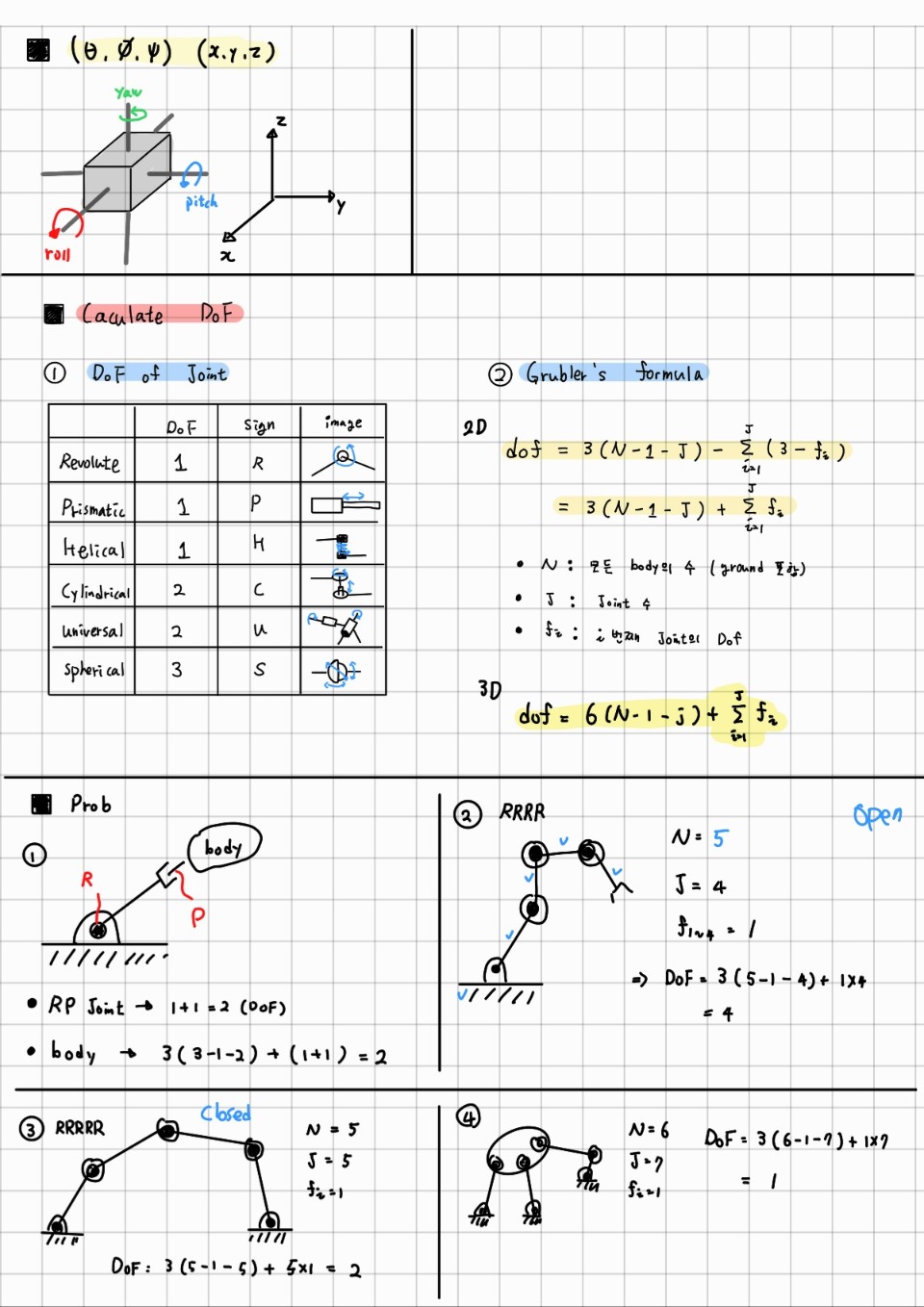
2.1 자유도(Degree of Freedom)
-
DOF(degree of : 관절에서 허용되는 독립적인 움직임 방향의 수
- 로봇의 자유도: 로봇의 각 관절, link가 회전하거나 이동할 수 있는 방향-
manipulator는 작업 공간 내에 임의의 위치에서 임의의 자세를 취하기 위해서는 6자유도 이상이 필요하다. 3관절은 end-effector(도구)가 원하는 위치로(x,y,z) 다른 3관절은 원하는 방향(pith, yaw, rolling)으로 움직이기 위해 이용한다.
-
3차원 공간 상에 놓인 물체의 상태를 표현할 때는 3개의 위치 정보, 3개의 각도 정보가 필요하다. 따라서 manipulaor는 물체의 상태에 대앙하기 위해 6DOF를 가져야 한다.
-
사람의 팔은 7자유도이며 7자유도 이상인 경우 redundant DOF(여자유도)를 갖는다.
-

공부하는 거북이