DART 플랫폼을 활용한 협동로봇 동작 운영 실습
1. 기자재
- 노트북 2개: 리눅스, 윈도우 용 각각
- usb 랜카드
- 로봇 교육용 기어, 결합용 나사
- 로봇 교육용 블럭, 결합용 나사
- Gripper-RG2: 차후 제공
- Gripper mounting, Controller: 차후 제공
2. 협동로봇
-
협동로봇의 정의: 사람과 같은 공간에서 작업하면서 사람과 물리적으로 상호작용할 수 있는 로봇
- 안정성/기능성/비용을 고려하여 활용법을 생각해봐야함
--> 협동로봇을 활용할 수 있는 공정과 안전성 혹은 기능성을 향상시킬 수 있는 방법 강구(사업계획서 형식)
-
DART: 두산의 협동 로봇 시뮬레이션 소프트웨어 플랫폼
- DRL: Doosan Robot Language
2.1 초급 교육
목표
1. 두산협동 로봇이 구성을 이해하고 라인업의 차이 이해
2. 안전 시스템을 이해하고 등록한 tool과 skill을 핫용한 pick&place 공정 설치
3. 로봇의 이상동작 발생 시 안전 복구 할 수 있다.
2.1.1 두산 협동 로봇 소개
-
협동로봇(cobot)의 정의- 사람과 같은 공간에서 작업하며 사람과 물리적으로 상호작용하는 로봇
(상호 접촉 발생) - 인간과 로봇이 같은 공간에서 작업하기 위한 협동 운영 조건을 충족하는 산업용 로봇(ISO 10218-1, 2022년 기준)
- 산업용 로봇이 사람과는 독립된 공간에서 작동하도록 설계된 점과 대조되는 점
- 사람과 같은 공간에서 작업하며 사람과 물리적으로 상호작용하는 로봇
-
협동로봇(cobot)의 특징- 안전한 외관 : 로봇 외관을 부드럽게 하여 충돌에 의한 상해 위험을 낮추고, 사람의 신체 끼임이 최소화 되도록 설계
<-> 산업용 로봇은 모터 및 가동부가 노출되어 접촉
- 경량설계: 충돌 시 위험을 최소화하고 2~3인의 작업자가 쉽게 설치 할 수 있도록 함
- 안전한 외관 : 로봇 외관을 부드럽게 하여 충돌에 의한 상해 위험을 낮추고, 사람의 신체 끼임이 최소화 되도록 설계
두산 협동로봇의 안전기능- 업계 최고 수준의 국제 안전 인증
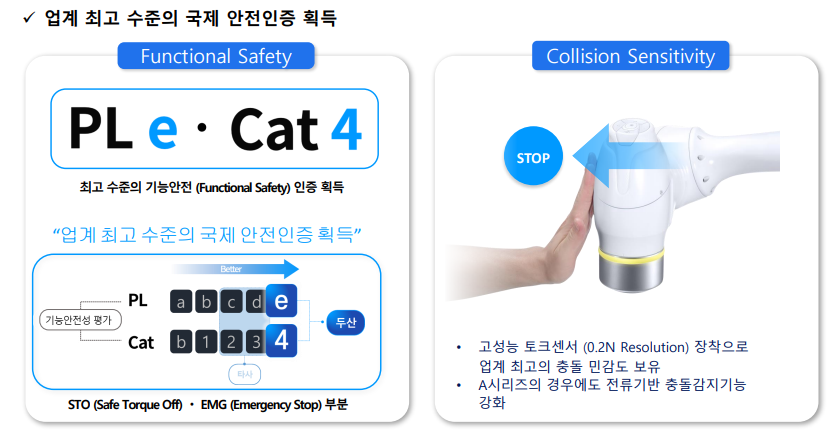
- 업계 최고 수준의 국제 안전 인증
-
작업장 안전 인증- 로봇 시스템은 관련법에 의거 위험성 평가 및 위험 저감 조치를 수행해야 한다.
- 펜스 등의 안전 방책이 없는 협동로봇 사용을 위해 로봇 시스템 사용자는 설치 단계에서 2가지 중 하나 수행 필요
- 협동로봇 설치 작업장 안전인증(로봇 사용자 협회)
- 한국 산업 표준에서 정한 안전 기준에 부합한 조치
- 산업용 로봇(협동로봇 포함) 시스템은 사용단계에서 주기적인 산업용 로봇 안전 검사 필요
- 두산 협동 로봇은 위험 저감 조치로 활용될 수 있는 다양한 안전 기능과 안전 기기 연결 인터 페이스를 제공
-
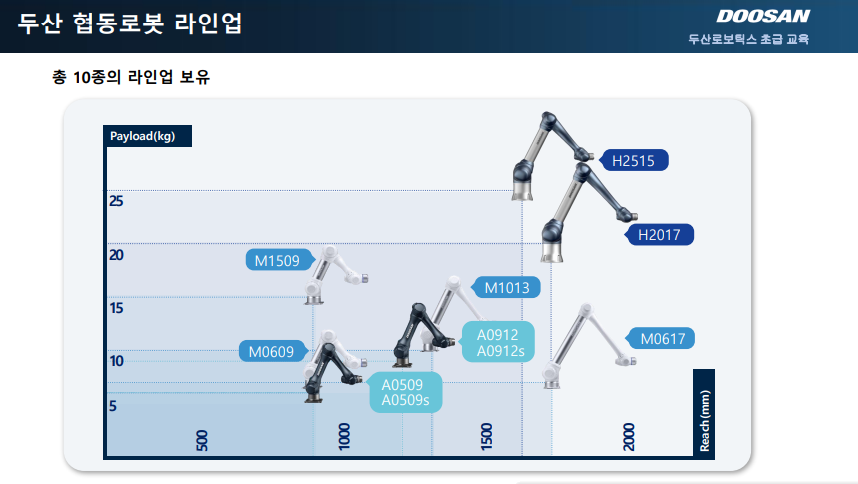
두산 협동로봇 라인업

-
실습 모델: M6090(6kg, 900mm)
-
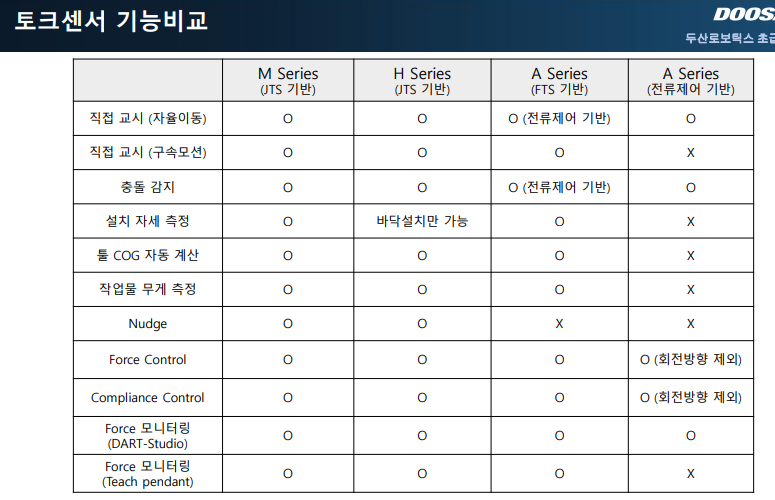
JTS: 좀더 세밀한 조정 가능
-
전류 기반 조작으로 대체가능하지만 안전성은 더 떨어짐
-
직접 교시: 사람이 직접 잡고 로봇은 원하는 곳으로 이동
2.1.2 DART-Platform
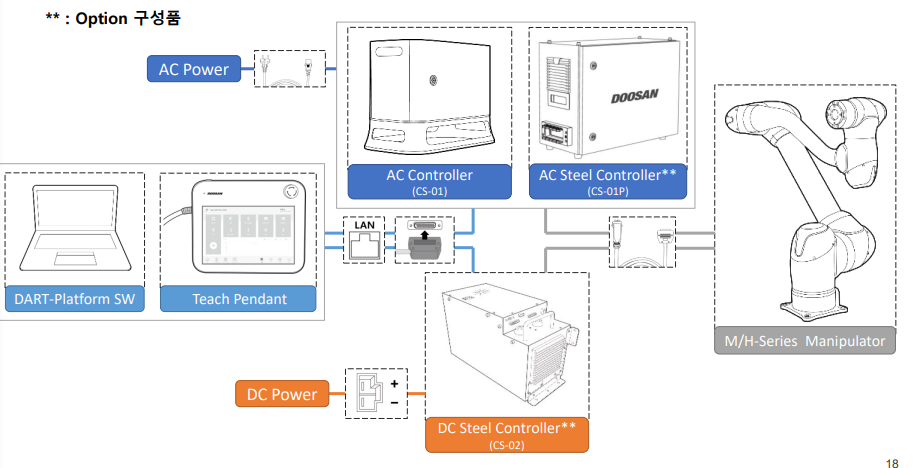
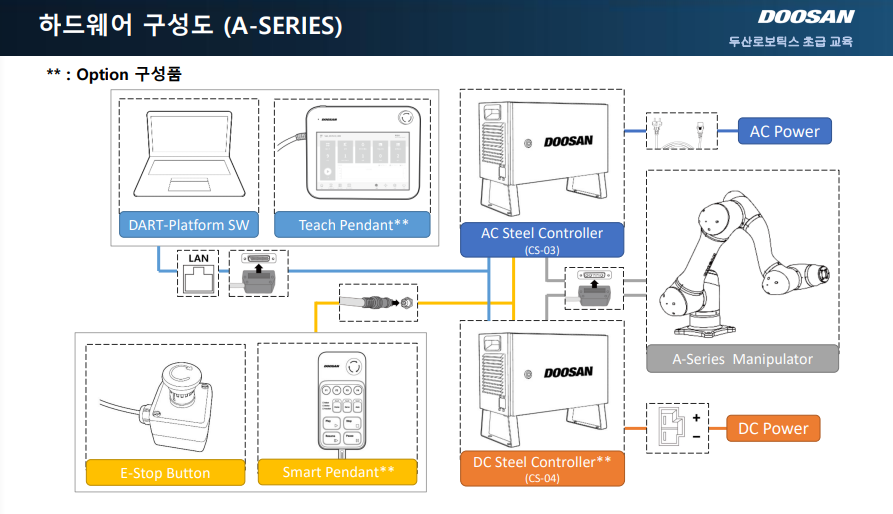
2.2 주요 구성품 소개
- 터치펜던트
- 컨트롤러
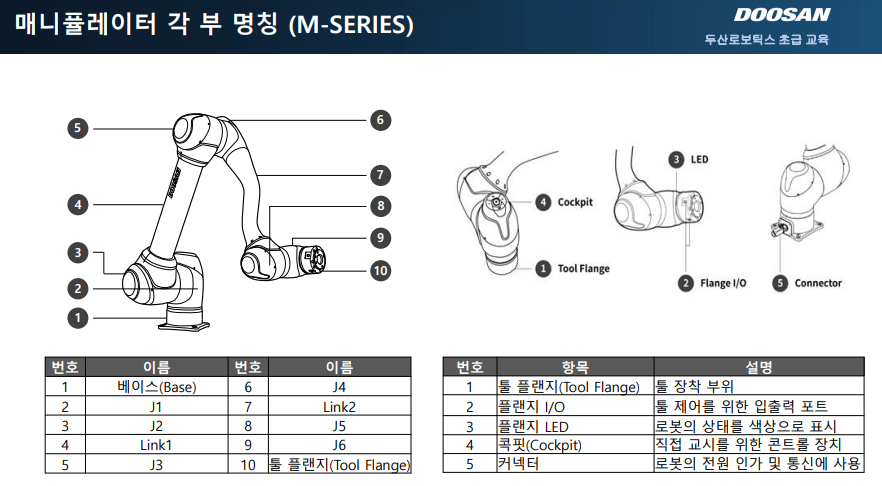
- 매니퓰레이터: 작업물을 운반하거나 부품을 조립하는데 이용되는 로봇 팔, 다양한 툴을 부착하고 자유로운 모션을 구사하여 사용할 수 있는 6축 다관절 로봇
- 전장에 대하여 전반적인 지식은 필요하다
- tcp (tool center point)
2.3 작업 영역
-
최대 도달 거리 VS 유효 작업 반경
-
작업영역은 tcp를 가지고 움직일 수 있는 영역
-
특이점(singularity)영역
: 다관절 로봇에서 다음자세를 계산하기 어려운 자세(또는 점) -
선형 이동 중 특이점 자세를 지나갈 때에 부저연스러운 움직임과 급격한 속도 및 자세 변화롤 인하여, 조인트 각도 제한 위반 또는 조인트 속력 제한 위한 에러가 발생할 수 있다
| 종류 | 설명 |
|---|---|
| Elbow | 3축이 0도에 근접한 경우 |
| Wrist | 5축이 0도에 근접한 경우 |
| Shoulder | 1축과 6축이 동일선상에 있는 경우 |
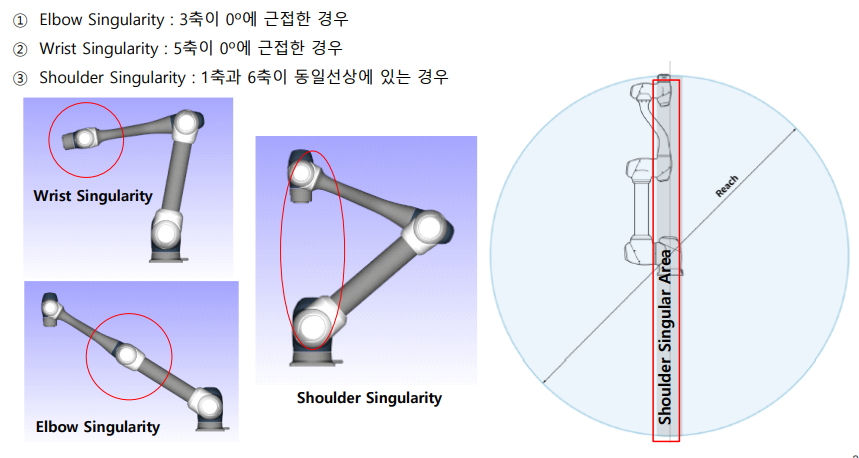
- 특이점 회피 방법
- 조인트 이동 명령어를 사용하여 특이점의 영향을 받지 않도록 수정
- 선형 이동 명령어 사용시에 특이점을 회피하는 옵션 사용(Mainsub 처리)
2.4
2.11.10203구속모션 - z축 고정과 면고정이 기본으로 설정 --> 모든 기준은 tool, end-effector 기준
로봇의 끝단 구속 모션에서 사용할 수 있는 [Z축 고정/면 고정/점 고정/각 고정] 4가지 고정 상태에 대해 설명하겠습니다. 이 고정 상태들은 로봇의 움직임을 특정 조건에 맞춰 제한하여, 안전하고 정확한 작업을 수행하도록 돕습니다.
- Z축 고정
설명: 로봇의 끝단이 Z축 방향으로만 움직이도록 제한하는 상태입니다. 다른 방향(X축, Y축)으로의 이동은 허용되지 않으며, Z축 방향에서만 직선 운동이 가능합니다.
용도: 높이 조정이 필요하거나 수직 이동만 요구되는 작업에 적합합니다. 예를 들어, 특정 위치에서 위아래로만 조절이 필요한 경우 사용할 수 있습니다. - 면 고정
설명: 특정 평면(X-Y, X-Z, 또는 Y-Z 평면) 상에서만 이동을 허용하고, 그 평면에서 벗어난 움직임을 제한하는 상태입니다.
용도: 특정한 평면 위에서 자유롭게 이동해야 하지만, 그 평면을 벗어나면 안 되는 작업에 적합합니다. 예를 들어, 평평한 작업 표면을 따라 이동해야 하는 경우에 유용합니다. - 점 고정
설명: 로봇의 끝단을 특정한 위치에 고정하여, 모든 방향으로의 이동을 제한하는 상태입니다. 고정된 점에서 회전만 가능하며, 위치 변화는 허용되지 않습니다.
용도: 고정된 지점에서만 회전 작업을 수행하거나, 정밀한 작업이 필요해 움직임을 완전히 제어해야 하는 경우에 적합합니다. 예를 들어, 조립 작업에서 특정 지점을 유지하며 다양한 각도로만 회전하는 작업에 유용합니다. - 각 고정
설명: 로봇의 끝단이 특정 각도를 유지하도록 제한하는 상태입니다. 이동 중에도 고정된 각도가 유지되며, 지정된 회전 축에 대한 회전이 제한됩니다.
용도: 로봇이 특정 각도로 움직여야 하거나, 작업 중 끝단의 회전이 변화하지 않아야 하는 경우에 유용합니다. 예를 들어, 용접 작업 중 용접 각도를 고정하고 이동해야 하는 경우 사용할 수 있습니다.
기초 조작
-
Joint 좌표계: 공장 홈위치의 6축 각도를 원점으로 하는 좌표계(degree)
- 사용 형태 : posj(J1, J2, J3, J4, J5, J6) -
Task 좌표계: Cartesian Coordinate System
- xyz 값은 베이스 좌표계의 원점으로부터 툴 중심위치까지의 거리
-
오일러각
- 좌표계에서 툴이 향하는 방향을 뜻하는 회전 정보 - rZ --> rY --> rZ 순으로 누적하여 회전 - Rz로 A각도, Ry로 B각도 그리고 다시 Rz로 C각도를 순서대로 회전하여 물체의 현재 회전 방향을 표현 - 최초로 기준 좌표계에서 Z축으로 회전한 후 변경된 좌표계를 기준으로 추가적인 회전을 함 (≠Fixed Angle) -
커넥터가 들어가는 방향이 y+
-
Base 좌표계: 로봇 베이스의 바닥 중심을 원점으로 한 좌표계
-
Tool 좌표계: 로봇의 툴 중심 위치를 원점으로 한 좌표계
- 사용 형태 : posx(X, Y, Z, A, B, C)
tool 좌표와 base 좌표를 구분하여 회전을 명확히 인지해야함
5. 컨트롤 박스 I/O 종류
SMPS: Switching Mode Power Supply의 약자로, 스위칭 모드 전원 공급 장치를 의미합니다. 일반적으로 전력을 변환하거나 전압을 조정하는 데 사용, 입력 전압을 먼저 고주파 스위칭을 통해 변환한 다음, 원하는 전압으로 변환하고 안정화하여 출력
엔드이펙터
- 로봇이 태스크를 실행학 위하여 로봇의 툴 플랜지에 부착되어 작업 대상에 직접 작용하는 기능을 가진 장치
- 그리퍼(전기/공압/진공)과 도구(너트러너/에어블로우 등)등이 있으며 통신기능 설정 및 TCP 설정을 할 수 있다
- TCP의 위치는 로봇의 테스크 모션과 힘/순응 제어의 기준점이 된다.
P2P : Point to Point
move j : 관절을 풀면서 사전 설정된 각도값으로 움직임
move l : 관절 상관없이 최단 거리 이동
