OS_08_2_Synchronization
1. Synchronization with OS Support
1) Semaphores
- 이전의 해결책들은 더 복잡한 synchronization problem에서는 적용하기가 어려움
- 그래서 semaphore를 사용
- Semaphore S - integer variable
- 2개의 atomic한 명령을 통해서만 접근할 수 있다.
- P(proberren, wait) and V(verhogen, signal)
- Hardware나 software구현이 가능하다.
wait(S):
while S<=0 do no-op; //양수가 아니면 반복
S--; //양수면 감소 즉, wait와 signal사이에 atomic함이 보장된다.signal(S):
S++; //끝나면 증가a) Critical Section of n Processed
- Shared data:
- semaphore S; //initially S = 1
- Process Pi
do{
wait(S);
critical section
signal(S);
remainder section
} while(1);b) Atomicity and Bounded Waiting
- Atomicity
- OS는 S 접근에 대해서 atomic함을 보장한다.
- Bounded waiting
- OS는 bounded wating을 wait(S)에서 return되는 순서를 통제함으로써 보장한다.
c) Busy Waiting Semaphore
- 이전에 봤던 모든 solution은 busy waiting을 필요로한다.
- process가 critical section에 존재한다면, 다른 process들은 loop를 진행하면서 critical section에 들어가기를 원한다.
- CPU가 소득없이 사용되므로 CPU가 낭비된다.
- 단일 CPU가 다른 여러 process와 공유되는 multiprogramming system에서는
- busy waiting은 CPU cycle의 낭비를 초래한다.
- 이러한 유형의 semaphore를 spinlock이라고 칭한다.
- lock이 짧은 시간동안 유지될 것으로 예상될 때, spinlock은 유용하다.
d) Semaphore Implementation to Avoid Busy Waiting
- 주요 아이디어
- semaphore에서 기다리고 있는 process는 busy waiting을 시키는 것보다 block한다.
- 다른 Process가 signal 명령(critical section이 끝남)을 실행한다면 process를 깨운다.
- Semaphore 구조체
typedef struct{
int value;
struct process *L;
}semaphore;- 2가지 operation
- Block : process를 중단시킨다 (running을 waiting으로 강제로 바꾼다.)
- Wakeup : blocked process P를 수행시키기 위해 깨운다.
e) Blocking Semaphore
- Semaphore의 operation
wait(S):
S.value--;
if(S.value <0){
add this process to S.L;
block; //process state -> waitingsignal(S):
S.value++;
if(S.value <=0){
remove a process P from S.L;
wakeup(P);
}- negative semaphore values
- busy waiting으로 구현된 semaphore은 negative value를 가질 수 없다.
- 하지만 blocking and waking-up으로 구현된 semaphore는 negative value를 가질 수 있다.
- 음수 개 만큼의 process가 waiting하고 있다고 할 수 있다.
- value를 먼저 감소시킨 결과값이다.
- list of waiting process
- 각 PCB에 link field를 사용하여 쉽게 구현할 수 있다.
- bounded waiting을 보장하기 위해서 FIFO queue를 사용한다.
- 그러나 세마포어의 올바른 사용은 특정한 대기 큐 전략에 의존하지 않는다.
f) Two Types of Semaphores
- Binary semaphore
- semaphore는 0과 1사이의 값만 가질 수 있다.
- 초기값은 보통 1
- Blocking semaphore는 음수 값을 가질 수 있기에, value가 1을 넘지 않는 다면 binary semaphore라고 칭한다.
- semaphore는 0과 1사이의 값만 가질 수 있다.
- Counting semaphore
- semaphore는 1보다 큰 값을 가질 수 있다.
- counting semaphore는 여러개의 process가 critical section에 동시에 실행될 수 있도록 한다.
- 초기 값은 process들의 최대 값이며, 이 값이 critical section에 실행됨을 허용하는 값이다.
- 이는 binary semaphore를 사용하여 구현이 가능.
g) Semaphore as a General Synchronization Tool
- Semaphore는 general synchronization tool로 사용 가능하다.
- mutual exclusion 뿐 아니라 cooperating process들의 원하는 실행을 보장하기 위해서 사용가능하다.
- Excute B in Pj only after A executed in Pi
- semaphore flag는 처음에 0이다.
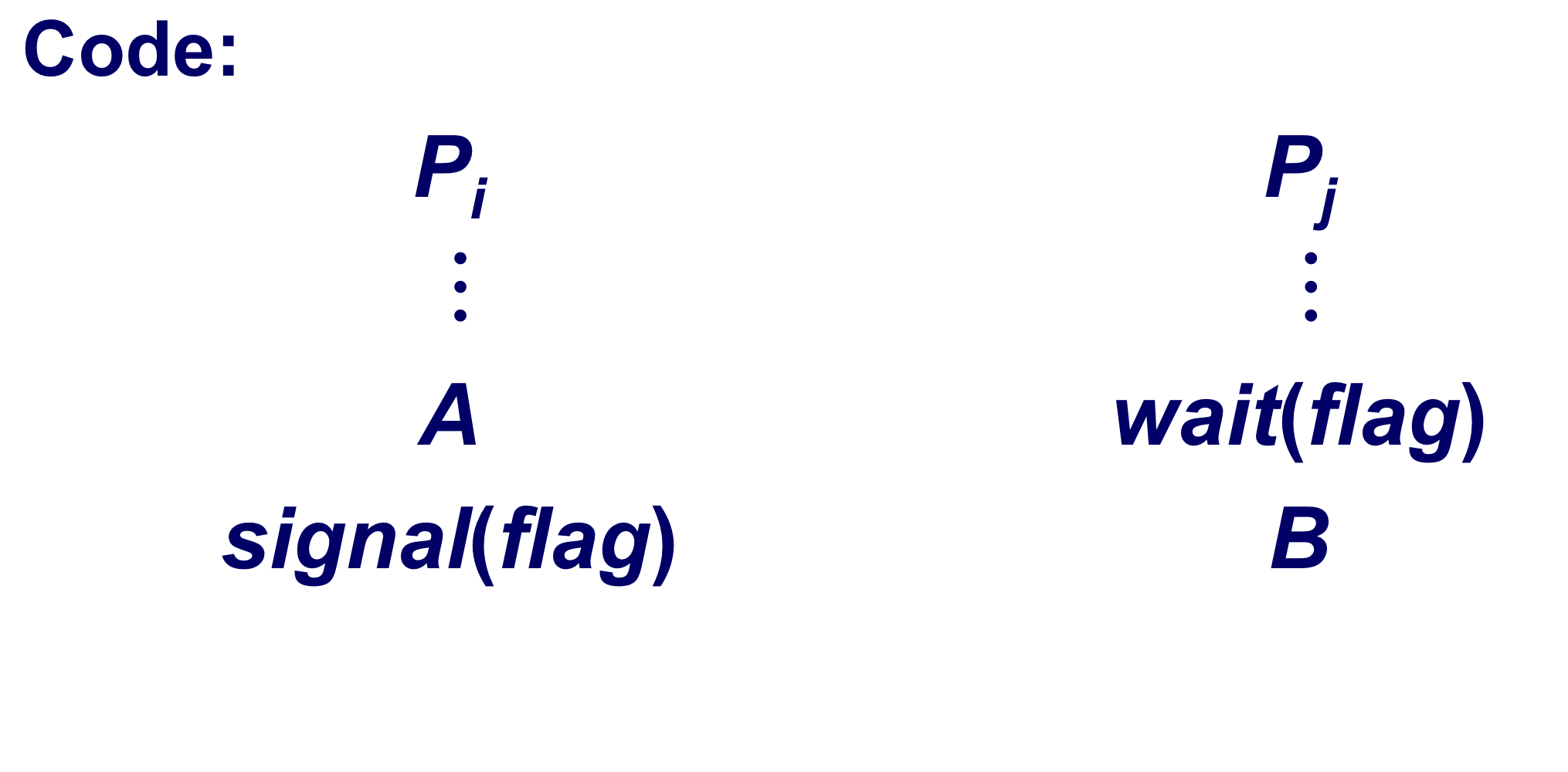
signal로 끝났음을 알려줌, wait에서 A가 끝나야 B가 실행됌.
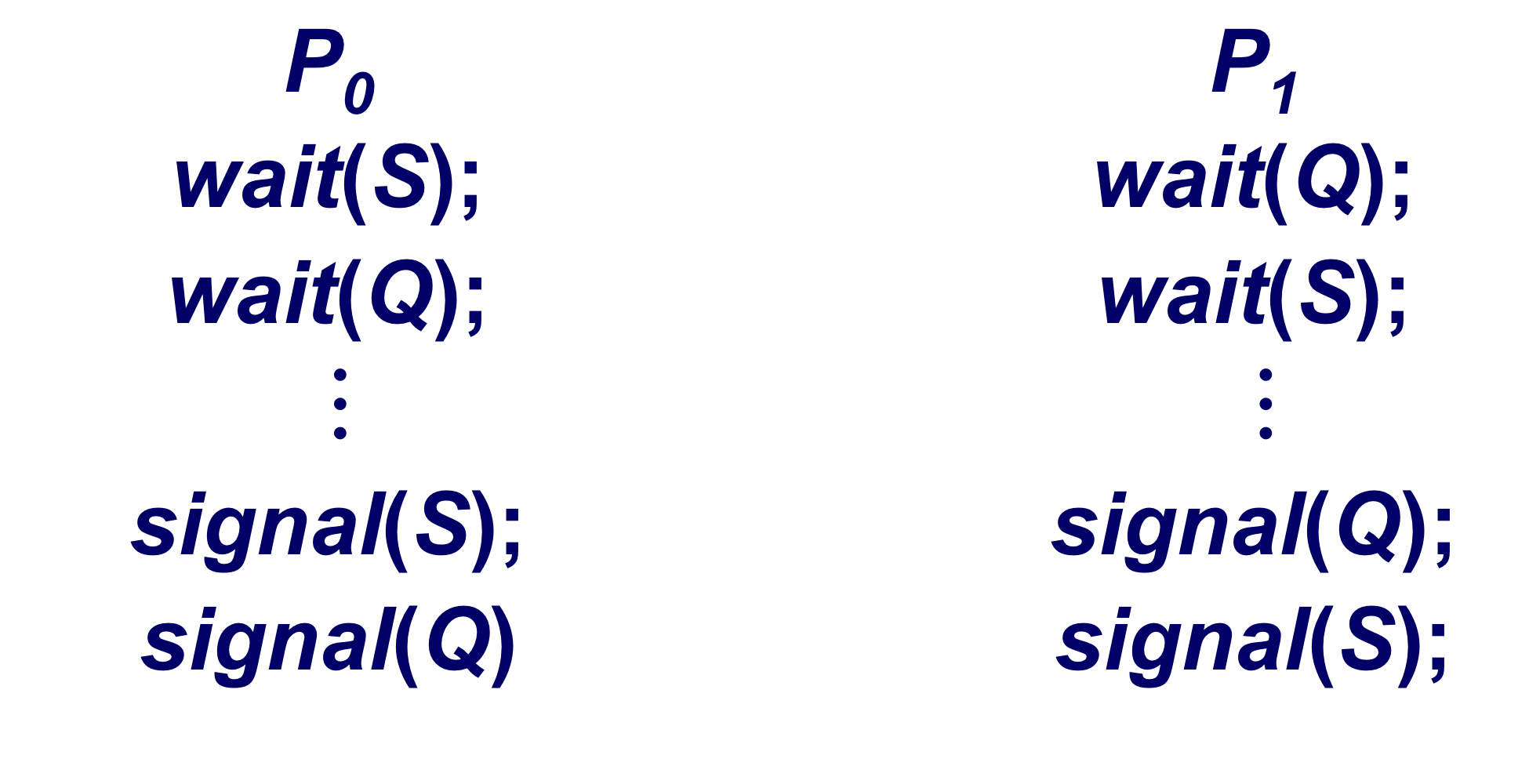
h) Deadlocks and Starvation
- Deadlock
- 두 개 이상의 프로세스가 서로가 기다리는 이벤트로 인해 무기한으로 대기하는 상태.
- S와 Q가 두 개의 semaphore, 초기값은 1.
-
P0에서 S→0 Q→-1, P1에서 Q→0 S→-1 즉, P0, P1 모두 진행하기 못하고 기다리기만 한다.
-
P0에서 Q는 -1, P1에서 S는 -1 signal이 발생해야 wait를 중단하는데 그러지 못함.
-
Starvation (indefinite blocking)
- 중단 된(blocking) process는 semaphore queue에서 나오지 않을 수 있다. (LIFO queueing)
- 나중에 들어온 process를 먼저 스케줄링 하기에, block된 것은 영원히 block이 가능
2) Mutex
- Mutex는 종종 semaphore의 동의어로 사용된다.
- MUTual EXclusion
- Mutex와 Semaphore의 차이점
- Mutex는 binary semaphore이다.
- Mutex는 소유 개념을 가지고 있다.
- 즉, 뮤텍스를 잠근 작업만이 해당 뮤텍스를 해제할 수 있다.
- POSIX APIs for Mutexes
- int pthread_mutex_init(pthread_mutex_t mutex, const pthread_mutexattr_t mutex_attr) → mutex를 초기화 하는 함수
- int pthread_mutex_destroy(pthread_mutex_t *mutex) → mutex를 제거하는 함수
- int pthread_mutex_lock(pthread_mutex_t *mutex) → Mutex를 잠그는 함수. 다른 스레드가 이미 잠근 경우 해당 스레드는 뮤텍스가 해제될 때까지 대기.
- int pthread_mutex_unlock(pthread_mutex_t *mutex) → Mutex를 해제하는 함수.
- int pthread_mutex_trylock(pthread_mutex_t *mutex) → Mutex를 잠그는 것을 시도하는 함수.
- to see whether a mutex is locked, but doesn't block
2. Classical Synchronization Problems
1) Classical Problems
- Semaphore와 Mutex는 primitives(기본적인 도구(?))로 사용한다.
- 하지만, 이 primitive를 사용하여 올바른 동기화를 시키는 것은 프로그래머의 책임이다.
- Non-trivial and classic synchronization problems
- Readers and Writers Problem
- Dining-Philosophers Problem
2) Readers-Writers Problem
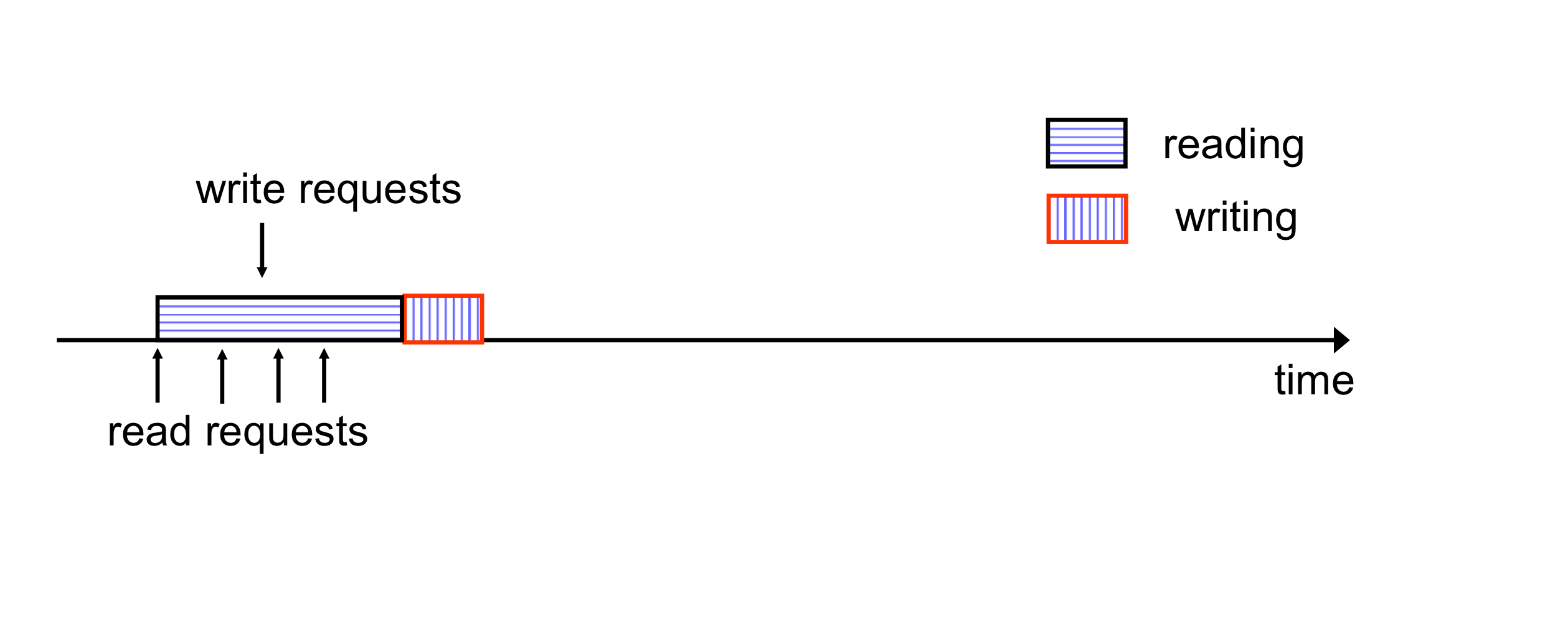
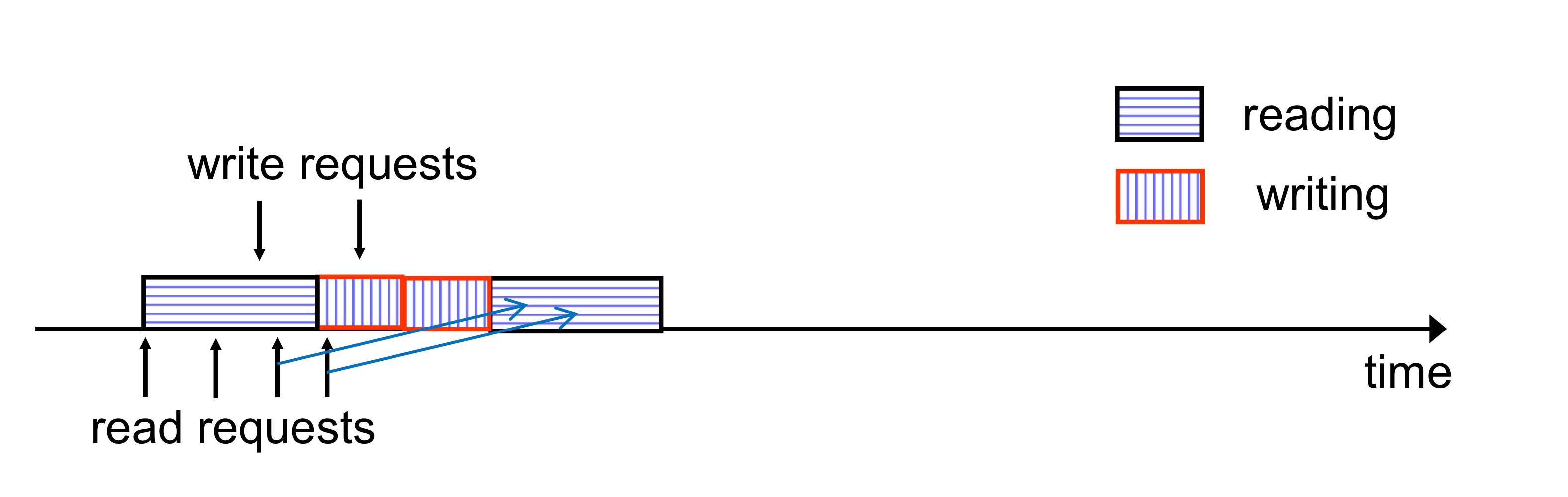
- Readers-Writers problem
- single buffer에 multiple reader과 multiple write가 접근하는 경우를 가정하자.
- 동시에 write에 access하는 경우에만 race가 발생한다.
- writer는 shared object에 대해 독점 access가 필요하다.
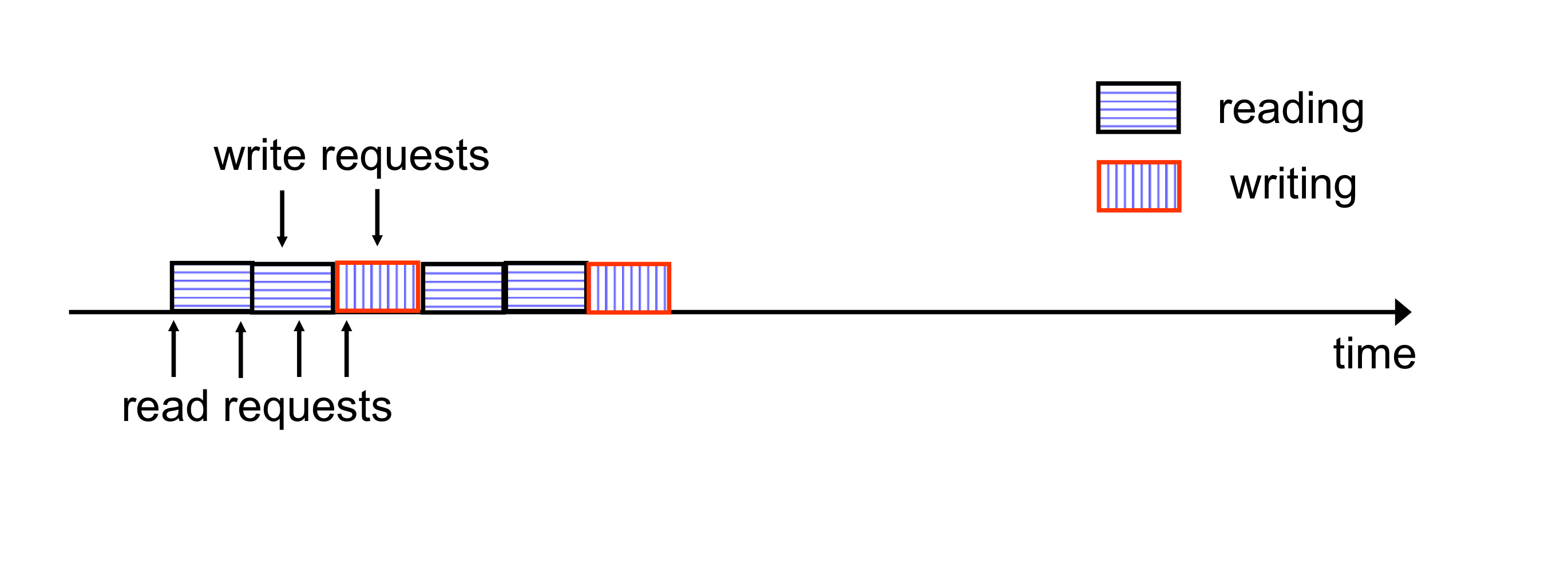
- “Single writer in CS” or “multiple readers in CS”
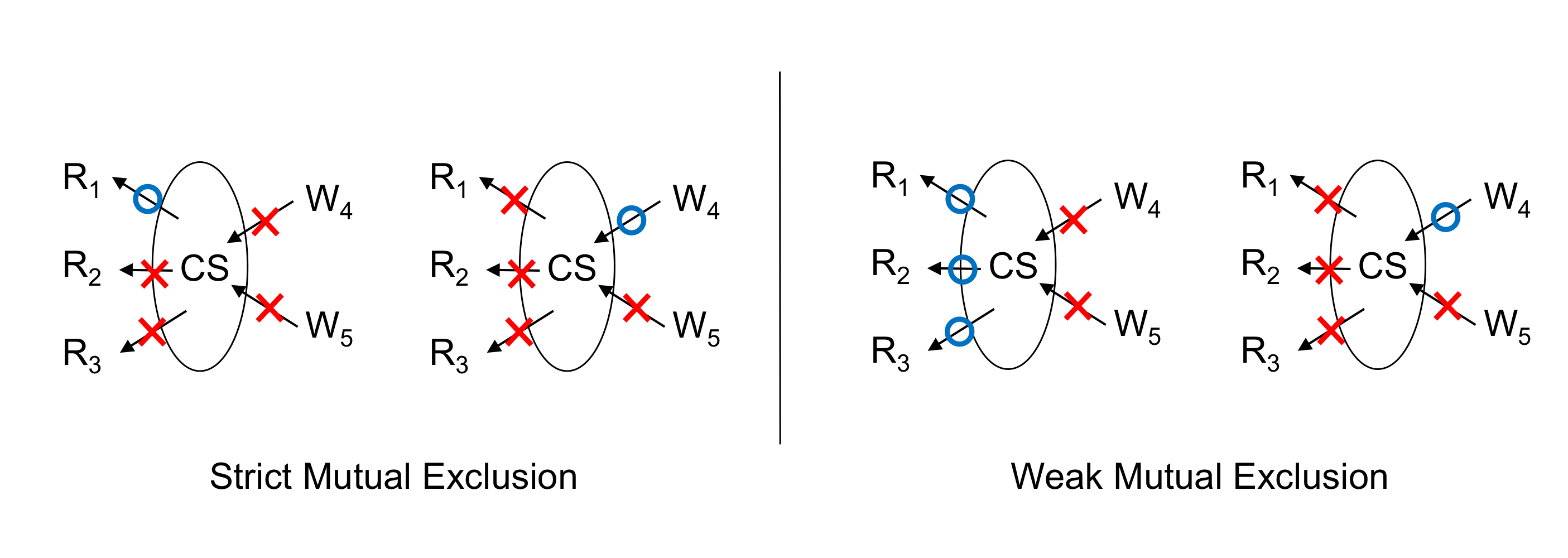
왼쪽은 한 개가 읽고, 한 개가 씀. 오른쪽은 여러개가 읽고, 한개가 씀
- 2가지의 경우가 있다 (둘 다 starvation 문제를 가지고 있음)
- First readers-writers problem → reader에게 특혜
- reader는 writer가 shared object에 대한 접근 권한을 얻기 전까지 기다리지 않는다.
- reader들은 다른 reader들을 기다리지 않음.
- Second readers-writers problem → writer에게 특혜
- write가 준비가 되면, writer는 가능한 빨리 일을 수행한다.
- writer가 shared object에 접근을 대기하고 있다면, 새로운 reader는 일을 수행하지 않는다.
- First readers-writers problem → reader에게 특혜
a) First Readers-Writers Problem
- The First readers-writers problem
- reader에게 특혜를 준다.
- writer는 unbounded waiting을 겪는다.
- Shared data
- semaphore S, wrt;
- initially, S = 1, wrt = 1, readcount = 0
wait(wrt);
...
/* writing is performed */
glob_x++;
glob_y++;
...
signal(wrt);wait(S);
readcount++;
if(readcount == 1)
wait(wrt);
signal(S);
...
/*reading is performed */
temp1 = glob_x;
temp2 = glob_y;
...
wait(S);
readcount--;
if(readcount == 0)
signal(wrt);
signal(S);- writer는 reader가 모두 나가야 수행 할 수 있다.
- reader는 처음 들어올 때, writer의 signal을 1로 바꾼다.
- readcount 변수 변경을 atomic하게 진행하기 위해 wait(S), signal(S)를 사용한다.
보통 writer가 많을 때 쓴다. (그래서 reader에게 특혜를 줌)
b) Second Readers-Writers Problem
- The second readers-writers problem
- writer에게 특혜를 준다.
- reader는 unbounded waiting을 겪는다.
- Shared data
- semaphore S1, S2, wrt, rd, wrtpending;
- Initially,
- S1 = 1, S2 = 1, wrt = 1, rd = 1, wrtpending = 1,
- readcount = 0, writecount = 0
wait(S2);
writecount++;
if(writecount == 1)
wait(rd);
signal(S2);
wait(wrt)
...
writing is performed
...
signal(wrt);
wait(S2);
writecount--;
if(writecount == 0)
signal(rd);
signal(S2);wait(wrtpending);
wait(rd);
wait(S1);
readcount++;
if(readcount == 1)
wait(wrt);
signal(S1);
signal(rd);
signal(wrtpending);
...
reading is performed
...
wait(S1);
readcount--;
if(readcount == 0)
signal(wrt);
signal(S1);- writer는 writecount에 작업을 수행하기 전에 S2를 통해 atomic을 보장함.
- writecount(writer의 개수)를 늘리고, 처음 writer가 들어왔다면 rd semaphore에 대해서 wait를 수행
- 다른 reader가 read를 수행할 수 없음.
- wrt semaphore를 통해서 읽기작업을 수행
- reader는 wrtpending semaphore를 사용하여 writer가 작업중인 경우 reader가 작업을 못하도록 막음.
- 즉, read작업이 끝나고, write 작업을 시작한다면 write작업이 모두 끝나야 read작업 시작
c) The Third Readers-Writers Problem?
- The third readers-writers problem
- 둘 다에게 priority를 준다.
- 도착순서에 따라 reader와 writer가 우선순위를 가진다.
- 만약 reader들이 자원에 접근중인 동안 writer가 도착한다면, writer는 reader들이 resouce를 free할 때 까지 기다린 후, resource를 변경한다.
- 이와 동시에 도착하는 reader들은 기다려야한다.
- 둘 다에게 priority를 준다.
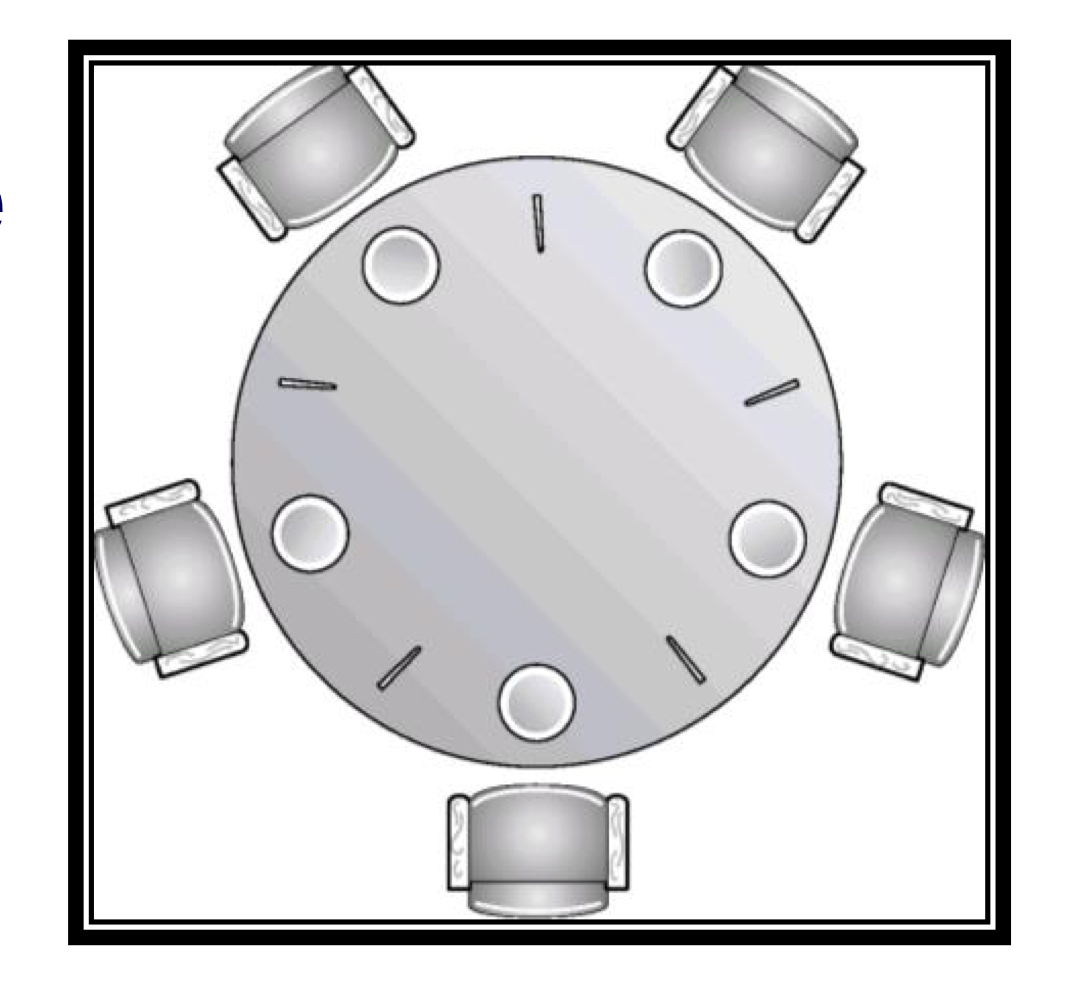
4) Dining-Philosophers Problem
- 생각하고 먹는 5명의 철학자를 고려한다.
- circular table에 5개의 single chopsticks이 잇다.
- 철학자들은 가끔 배가 고파지고, 자신에게 가장 가까운 두개의 젓가락을 집으려고 한다.
- 철학자는 한 번에 한 개의 chopstick만 집을 수 있다.
- DP problem
- concurrency-control의 문제이다.
- deadlock and starvation free 방식으로 여러 프로세스 사이에 여러 자원을 할당해야함을 나타내는 예제
- 5개의 semaphore를 사용한 간단한 solution
-
철학자들은 wait 명령을 수행함으로써 chopstick을 집으려고 한다.
-
철학자는 signal 명령을 수행함으로써 chopstick을 내려놓는다.
-
Declare : semaphore chopstick[5];
-
philosopher i의 구조
do { wait(chopstick[i]); wait(chopstick[(i+1) % 5]); eat ... signal(chopstick[i]); signal(chopstick[(i+1) % 5]); think ... } while (1); -
wait(chopstick[i]) → 자신의 왼쪽에 있는 젓가락을 기다림.
-
wait(chopstick[(i+1) % 5] → 자신의 오른쪽에 있는 젓가락을 기다린다.
-
signal(chopstick[i]) → 자신의 왼쪽에 있는 젓가락을 내려놓음.
-
signal(chopstick[(i+1) % 5)] → 자신의 오른쪽에 있는 젓가락을 내려놓음.
-
- 방금의 해결책은 deadlock을 발생시킬 가능성이 있다.
- Possible solutions
- 최대 4명의 philosophers가 동시에 table에 앉을 수 있도록 허용한다.
- philosopher가 두 개의 젓가락을 모두 사용 할 수 있을 때만 젓가락을 집을 수 있도록 한다.
- 비대칭적인 solution 사용 → 홀수 번호의 철학자는 왼쪽의 젓가락을 먼저 집고 오른쪽의 젓가락을 집는다, 반대로 짝수 번호의 철학자는 오른쪽의 젓가락을 먼저 집고 왼쪽의 젓가락을 집는다.
- deadlock-free solution은 starvation의 가능성을 반드시 제거하는 것이 아니다. 즉, 교착 상태가 발생하지 않더라도, 철학자 중 일부는 우선권을 얻지 못하고 무한이 대기할 수 있다.
