SkyPort: Investigating 3D Teleportation Methods in Virtual Environments
- 두 가지 기존 목표 지정 방법(직선 및 포물선)과 세 가지 종류의 목표로의 전환(: (1) instant, (2) interpolated (as an intermediary step between discrete and continuous movement), and (3) continuos)을 결합한 여섯 가지 3D 텔레포테이션 방법을 제안
INTRODUCTION
movement in virtual environments: (1) discrete and (2) continuous
- discrete movement: teleportation --> 2D 또는 pre-defined 2D plane(2.5D)에 국한되어 있음 => 본 연구에서 3D로 확장
- continuous movement: flying ...
Contribution
- Six 3D teleportation methods in virtual environments.
- An empirical evaluation of six proposed 3D teleportation
methods focused on the quick and precise target selection
and reduction of VR sickness.
RELATED WORK
Virtual Reality Locomotion Techniques
- walking in place [36], moving tiles [15] and shoes [16], leaning in chairs [20, 40], using fngers [18, 46] and controllers to simulated walking [32]
- discrete :teleportation (using controllers [9, 14], feet [10, 39], gates [17], or static portals [13])
- 하지만 jumps는 immersion을 깨뜨리고, eye strain을 유발함 --> 이를 극복하기 위해 continuous locomotion 제안 (redirected, scaled, in-place walking)일부는 3D로 전환 가능 - walking up the stairs [2, 25, 45] or jumping [33, 44], they still restrict the granular exploration of the complete 3D virtual space
Point&Teleport Locomotion
Teleport consist of two main operation: (1) aiming at a target (2) transitioning to a target (reduced immersion and orientation but easy to user and little effort and does not tend to cause motion sickness)
TELEPORTATION CHALLENGES IN 3D
- related to explicitly setting a teleportation point in 3D space (point a user wants to teleport to)
- set an adjustable maximum distance up 필요. --> overlaid the touchpad of controller with a scale in the longitudinal axis - 컨트롤러의 터치패드에 길이축에 스케일을 overlay = 바닥에 가까운 아래쪽 터치 - 가까운 거리 선택, 상단에 가까운 위쪽 터치 - 먼 거리 선택
- relative placement of the user to the teleport point
- 2D는 ground level에 위치시키면 되지만 3D는 그렇지 않음. - body, hand torso를 3D point에 위치시켜야하는데, teleport pointㅡㄹ target position of the controller로 함.
- 하지만 이렇게 하면 지며 수준 아래로 떨어질 수 있기 때문에, VR 설정 내에서 실제 지면 수준을 가상 환경 지면 수준과 비교하고 후자를 처음 수준으로 제한함
EVALUATION
Participants
We recruited 24 participants (identifed as 5 female, 19 male) aged between 22 and 33 years old (M = 26.17, SD = 2.87)
Study design
1. aming methods (linear vs. parabolic)
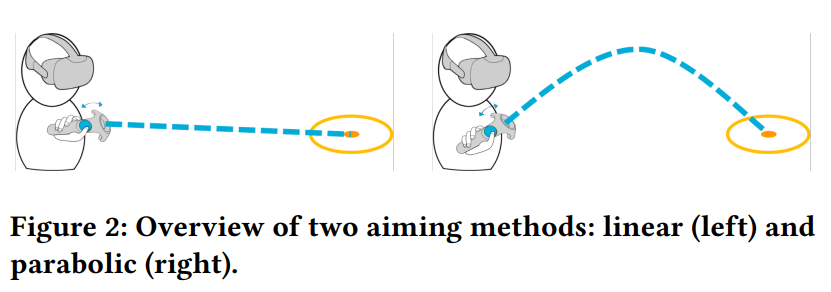
- maximum distance를 동일하게 18m로 설정.
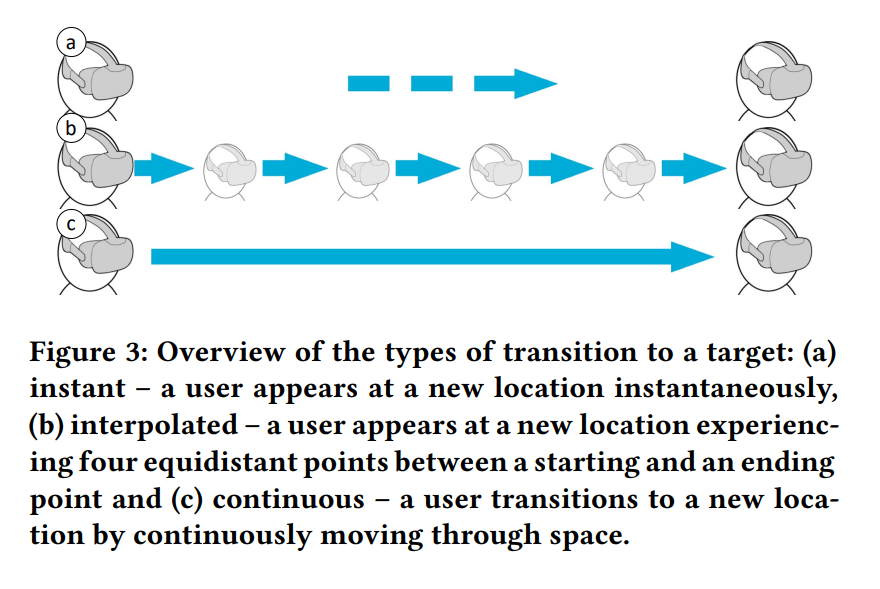
2. transitioning to a target (instant vs. interpolated vs. continuous)
- instant: existing method of teleportation (view faded out over 0.1s, actual teleportation takes place and view fades back in over 0.1s)
- continuous: linear movement to a target
- interpolated: 현재 위치에서 목표 위치로 이끄는 궤적에서 사용자가 텔레포트될 네 개의 등간격 지점을 계산 -> 목적지에 도달하기 전에 instant 텔레포트와 유사한 방식으로 4번 중간 정지
3. target distance (7m, 14m, 21m)
4. target direction (left, right, up, down, in front of)
- 두 독립 변수에 대한 조합을 사용하여 동전을 수집하는 궤적을 만들었습니다. 각 연속적인 동전은 다음 다섯 가지 대상 방향 중 하나에 무작위로 생성
(3 distance x 5 direction x 3번 시도 = 45번)
Task
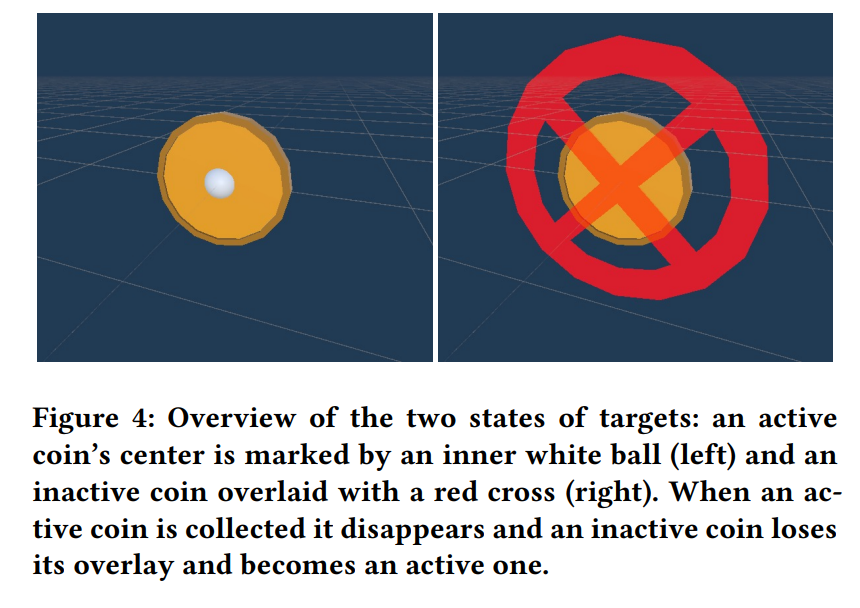
(1) 수집할 동전(활성) 및 (2) 빨간 십자가로 오버레이된 다음 동전
Apparatus
used a wireless HTC Vive setup, which includes HTC Vive Controller
with Deluxe Audio Strap and Wireless Upgrade
RESULTS
- linear와 instant 조합이 속도와 정확성 츠겸ㄴ에서 가장 뛰어난 성능
Coin Collection time: the time necessary to collect each individual coin (starting from the second one)
-
aimin methods: linear faster than parabolic
-
transitioning to the target: instant fastest > continuous > interpolated
-
target direction: teleportation forward takes the shortest amount of time < upward < left, right < downward
-
target distance: 7m shortest amount of time < 14m < 21m
-
signifcant interaction effects for aiming method*target direction (F (4, 2047) = 11.42,p < 0.001), aiming method*target distance (F (2, 2047) = 9.24,p < 0.001) and target direction*target distance (F (8, 2047) = 3.14,p < 0.01).
Coin Collection Offset: measured distance between controller and cetre of the coin after the last teleport
-
transitioning to the target: instant shortest < continuous and interpolated
-
aiming methods: no significant difference in linear and parabolic
-
target direction : downward, forward shortest < left, right, upward
-
target distance: 7m > 14m and 21m
-
significant interaction effect: transitioning*target direction
Number of Teleportations
-
aiming methods: linear < parabolic
-
transitioning to the target: continuous < interporated < instant
-
target direction: downward > upward, leftrawd, rightward, forward
-
target distance: 7m < 14m <21m
-
(1) aiming method * target direction (F (4, 2047)= 35.5,p < 0.001), (2) type of transitioning * target direction (3) aiming method * target distance (F (2, 2047) = 28.3,p < 0.001), (4) type of transitioning * target distance (F (4, 2047) = 3.9,p < 0.01), (5) target direction * target distance (F (8, 2047) = 13.6,p < 0.001).
Virtual Reality Sickness and Presence
- Sickness: parabolic interpolated > linear instant and parabolic continuous
- Presence: no statistically signifcant
Subjective Feedback : Ease and Frequency of Use, Speed, Orientation
- aiming methods: linear easier, intuitive < parabolic
- transitioning to the target: no significant difference
Gaining the High Ground: Teleportation to Mid-Air Targets in Immersive Virtual Environments

연구 목적 및 배경
이 연구의 목적은 가상 현실 환경에서 사용자가 중간 공중 목표물로 순간이동할 수 있는 새로운 기법을 개발하는 것입니다. 기존의 순간이동 기술은 주로 선택 가능한 장면 객체 근처의 목표 위치에 국한되어 있었지만, 이 연구에서 제안하는 기법들은 사용자가 중간 공중 목표물로도 이동할 수 있게 함으로써, 가상 환경 내에서의 이동 가능성을 확장하고자 합니다. 연구의 배경은 순간이동과 가상 회전을 결합한 관련 연구에서 영감을 받았으며, 고도 변경을 기존의 목표 선택 과정에 통합하는 방식에 초점을 맞추고 있습니다.
상호작용 기법 (Interaction Technique)
상호작용 기법은 사용자가 가상 환경에서 고도를 변경하면서 순간이동할 수 있도록 하는 세 가지 다른 접근 방식을 포함합니다. 이 기법들은 고도 변경이 수평 이동과 동시에, 연결된 두 번째 단계로, 또는 수평 이동과 별개로 이루어질 수 있도록 설계되었습니다. 각 기법은 사용자가 중간 공중 목표물로의 이동을 더 쉽고 효율적으로 수행할 수 있도록 하기 위해 고안되었습니다.
실험 및 결과
실험은 30명의 참가자를 대상으로 진행되었으며, 참가자들은 세 가지 상호작용 기법을 사용하여 두 가지 다른 태스크(경로 따라가기 태스크와 탐색 태스크)를 수행했습니다. 실험 결과, 동시 방법이 가장 높은 정확도를 보였고, 두 단계 방법이 가장 낮은 작업 부하를 유발하며 가장 높은 사용성 평가를 받았습니다. 별도의 방법은 혼자서는 가장 적합하지 않았지만, 다른 기법들과 결합하여 사용될 때 유용할 수 있음을 발견했습니다. 이러한 결과를 바탕으로, 연구팀은 중간 공중 탐색 기법에 대한 초기 설계 지침을 제시했습니다.
- our three techniques differ in the extent to which elevation changes are integrated into the conventional target selection process: Elevation can be specified either simultaneously, as a connected second step, or separately from horizontal movements.
INTRODUCTION
-
teleportation: sickness 최소화
-
가상 바닥이나 일련의 인접한 지붕을 따라 이동할 수 있지만 근처에 객체가 없는 mid air target으로 이동할 수 없음
-
Our work is motivated by related research on the specification of
virtual rotation as an additional degree of freedom for teleportation -> prior work has presented techniques that enable the user to specify rotation either (1) simultaneously with a target position [5, 20, 44, 46], (2) as part of a two-step process along with a target position [3, 25], (3) or as an additional mechanism independent of movement to a target position [3, 38, 49].- Our three techniques for changing elevation in this paper are derived from these conceptual models.
contribution
- the derivation of three conceptual approaches for adding elevation change as an additional degree of freedom to common teleportation workflows
- the design of three novel teleportation techniques based on these concepts, which allow users to execute a variety of horizontal, vertical, and diagonal movements
- a discussion of the benefits and drawbacks of these three techniques as identified by a user study in a constrained route following as well as a more open search scenario (N = 30)
- a summary of initial design guidelines for mid-air navigation techniques combining prior as well as the presented results
RELATED WORK
- 장면을 더 잘 overview하기 위해, 사용자의 시점은 자신의 아바타의 자기 중심적 관점에서 일시적으로 분리되어 navigation을 위해 고정된 높은 관점으로 이동한 다음 새 위치에서 아바타를 다시 구현할 수 있습니다 [11, 21].
Prior Approaches to Mid-Air Travel
-
Steering: 하지만 멀미 증상 원인으로 간두죔 -> Teleportation으로 완화
-
특정 속도 임계값을 초과할 때 자동 순간이동을 하는 pointing-directed flying [35] -> 순간이동될 지상 기반 목표 위치를 초기에 선택해야 합니다.
-
Matviienko et al. presented two central challenges in extending ground-based teleportation to mid-air travel [30]: the selection of a target location in mid-air (C1) and the sensible choice of a relative camera placement with respect to this location (C2)
Virtual Rotation as an Additional Degree of Freedom for Target-Based Travel
Simultaneous Specification
- The virtual rotation to be applied during a teleport is specified at the same time as a target position is selected with the selection ray
- Cuved Teleport[20], Point&Teleport[5], additional inpu (joystick, touchpad... [20,46,49])
Two-Step Specification
- selection of a POI in the first step influences the user's rotation at the target position specified in the second stop
- Navidget technique[25]
Sperate Specification
- position and rotation is decoupled into two technique
- Rotation Snapping [3, 49]
This paper ...
- applied each of these design paradigms to the specification of elevation and compared the resulting techniques empirically to gain a better understanding of their effectivity, efficiency, and usability.
- Our prototypes with simultaneous, two-step, and separate mechanisms will be explained in the following.
TECHNIQUE DESIGN
Basic Teleportation Features
- 컨트롤러를 이동함으로써 사용자는 포물선이 장면 객체와 교차하는 위치를 어디서든 선택할 수 있으며, 이는 또한 해당 지오메트리(예: 집의 지붕)에 도달할 수 있는 더 작은 고도로 이동할 수 있게 합니다.
- 그러나 벽으로의 불쾌한 순간이동을 피하기 위해 수평으로부터 30도 이상 벗어나지 않는 표면만 허용합니다.
- 사용자가 이미 더 높은 고도에 위치한 경우(예: 지붕 위에 서 있는 경우), 포물선은 현재 고도의 보이지 않는 proxy 과 교차하여 이후에 고도 변경 없이 수평으로 순간이동할 수 있도록 합니다.
- 대상 선택 중에 미리보기 아바타는 순간이동이 실행될 경우 사용자가 위치할 방법을 시각화합니다. 관련 작업에 의해 예측 가능성 측면에서 유용하다는 것이 확인되었습니다 [16, 44, 48]. 트리거를 완전히 누르면 순간이동이 실행되며, 트리거를 이른 시간에 놓으면 사용자가 의도를 바꿀 경우 순간이동이 취소

Specifying Elevation Changes: Simultaneous
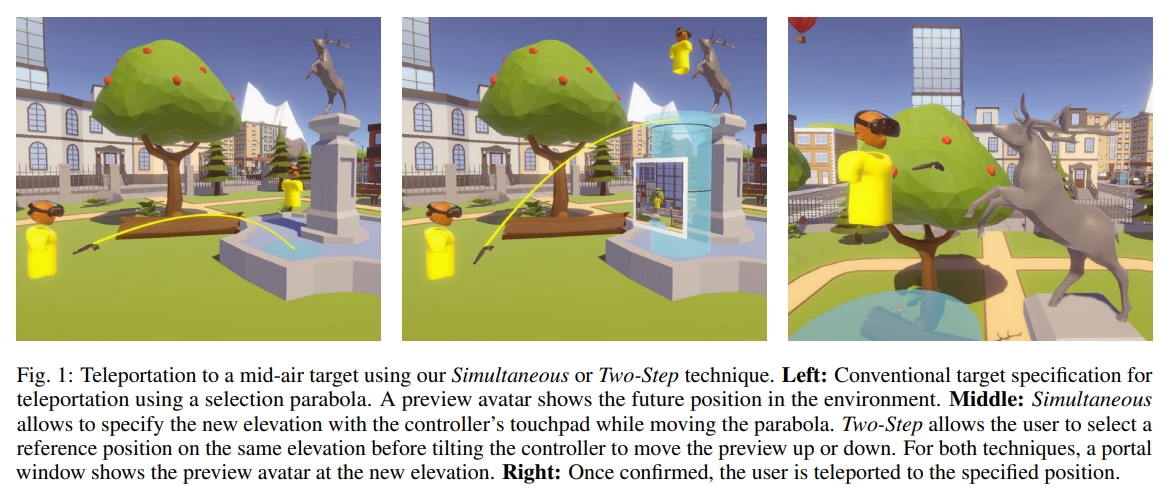
- 사용자가 현재 고도 수준에서 포물선을 통해 참조 지점을 선택하는 동안 터치패드를 조작하여 미리보기 아바타를 이 지점과 상대적으로 위로 또는 아래로 이동시킬 수 있습니다.
- 이를 위해 터치패드의 중앙에서 사용자의 손가락의 수직 거리가 미리보기가 위로 또는 아래로 이동할 속도를 결정하는 데 사용됩니다(vmax = 3m/s).
- Figure1 (Center): 추가적인 기둥 지오메트리(거리: 1m)는 미래의 플랫폼 위치를 나타냅니다.
- preview가 수평 지오메트리와 교차하는 경우, 추가적인 하향 입력은 무시되어 scene 지오메트리에 정렬되고 객체나 지면 아래의 목적지를 방지합니다.
- 이 방법으로 큰 고도 변경을 지정하는 것은 strain their neck. 또한, elvation 차이가 커질수록 preview를 볼 수 없게 되어 더욱 어려워집니다.
- 따라서 우리는 현재 eye 레벨의 사용자 앞에 포털 창을 표시. 이 창은 현재 선택된 고도에서 preview 아바타의 third-person view를 보여줍니다(Figure 1 Center).
- 이 포털 창을 사용하면 사용자는 큰 고도 변경을 지정할 때 머리를 돌리거나 낮은 아바타 가시성과 대면하지 않아도 수평 순간이동을 위해 얻는 시각적 정보와 동일한 시각적 정보를 얻을 수 있습니다. 포털 창은 실제 미리보기 아바타를 가리지 않을 때만 나타나며, 피어 사용자에 대한 수평 거리와 상관없이 동일한 상대 크기를 유지
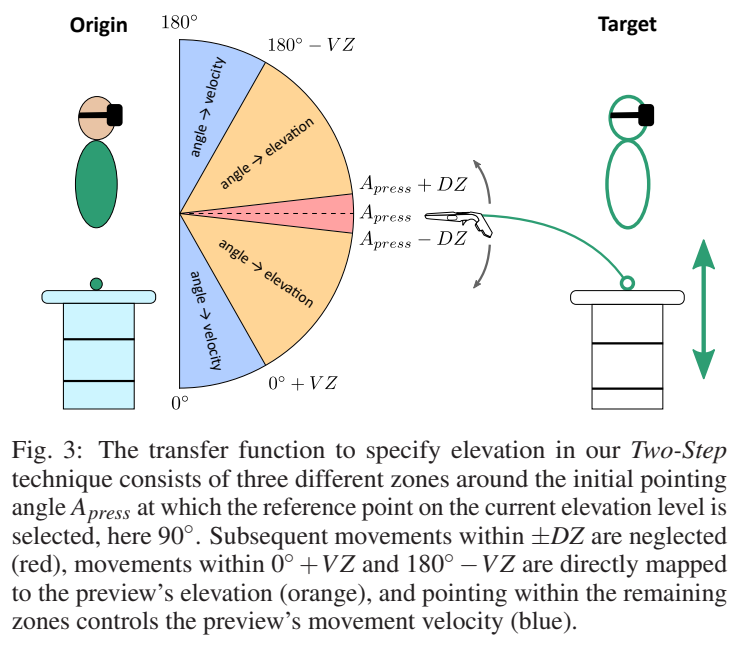
Specifying Elevation Changes: Two-Step
-
user select and lock a reference point on the current elevation level with their parabola by pressing and holding the trigger all the way down. 이후의 두 번째 단계에서는 컨트롤러를 위로 또는 아래로 기울이면서 preview의 고도를 조절할 수 있습니다. (Figure 3)
-
이 초기 각도 주변 Deadzone (±DZ = ±3°, 빨간 영역): 미리보기에 대한 각도 변경이 적용되지 않습니다.
-
Deadzone을 벗어나면 컨트롤러의 포인팅 각도와 preview의 고도 간에 직접적이고 정확한 조절을 허용하는 선형 매핑이 이루어집니다 (1° =ˆ 0.1m, 주황색 영역). 그러나 이 선형 매핑에서는 더 큰 고도 변경이 불편하거나 불가능한 팔 움직임을 필요로할 수 있습니다.
-
따라서 absoulte 컨트롤러 각도가 일정 범위 내에서 수직성에 접근할 때 (±V Z = ±30°, 파란색 영역), velocity 기반 전달 함수로 전환하는 것을 제안합니다.
- velocity zone 내에서는 컨트롤러 각도와 시작 지점 간의 각도 차이가 preview 아바타가 위로 또는 아래로 이동할 속도를 정의합니다 (1° =ˆ 0.1m/s). --> 따라서 사용자는 미리보기를 속도 영역을 사용하여 coarse region으로 이동한 후 직접 매핑을 사용하여 보다 fine-grained 조절을 수행할 수 있습니다. velocity 영역에 진입하거나 나가는 것은 사용자에게 인식을 높이기 위해 컨트롤러 진동을 통해 알려집니다.
-
이전과 마찬가지로 새로운 플랫폼 위치가 수평 지오메트리와 교차하는 경우 하향 입력은 무시됩니다.
-
이전에 누르고 있던 트리거를 놓으면 순간이동이 실행됩니다.
Specifying Elevation Changes: Separate
- 분리 기술은 수직 축을 따라 임의의 위아래 이동을 가능하게 하도록 설계되었습니다. 해당 상호 작용 순서는 Figure 4에 나와 있습니다.
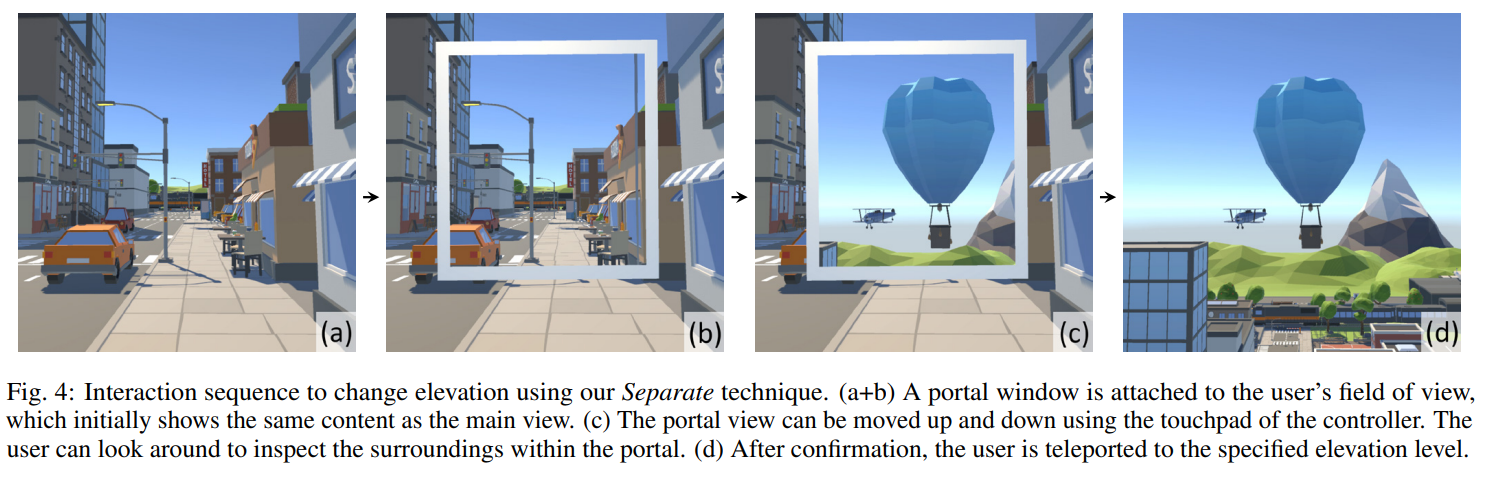
- 사용자는 고도를 변경하려면 터치패드 위에 있는 메뉴 버튼을 누르면 메인 뷰와 동일한 콘텐츠를 초기에 표시하는 정사각형 포털 창이 시야에 부착됩니다. 사용자는 그런 다음 터치패드를 사용하여 포털 내에서 뷰를 위로 또는 아래로 이동시킬 수 있으며 이는 simultaneous 기술에 대한 설명에서 설명한 컨트롤과 유사합니다 (vmax = 3m/s). 포털이 사용자의 뷰에 부착되어 있기 때문에 사용자는 트리거를 눌러 이동하기 전에 지정된 고도 주변을 자유롭게 살펴볼 수 있습니다.
- 포털을 열면 시점이 'backward' 바뀌게 되는데, 이는 1인칭 시점을 표시할 때 제공하는 매끄러운 전환보다 3인칭 시점이 더 이해하기 어렵다고 생각
EMPIRIC COMPARISON OF ELEVATION SPECIFICATION
Task
Route Following Task
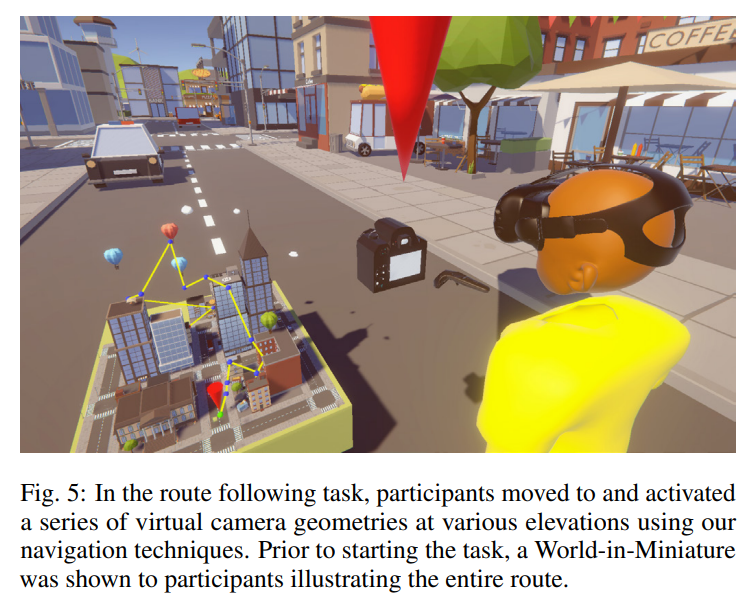
- Figure 5에 나와 있는 것처럼 각 웨이포인트는 환경에서 흥미로운 관점을 향한 카메라 지오메트리 형태로 시각화되었습니다. 다음으로 이동할 카메라를 나타내기 위해 빨간 콘과 흰색 가이드 라인이 사용자에게 표시되었습니다.
- 개별 참가자들이 고소공포증을 가질 수 있으므로 실험 시작 전에는 참가자들에게 실험을 진행하기 전에 전체 경로를 보여주는 World-in-Miniature [40]가 제시되었습니다
Search Task
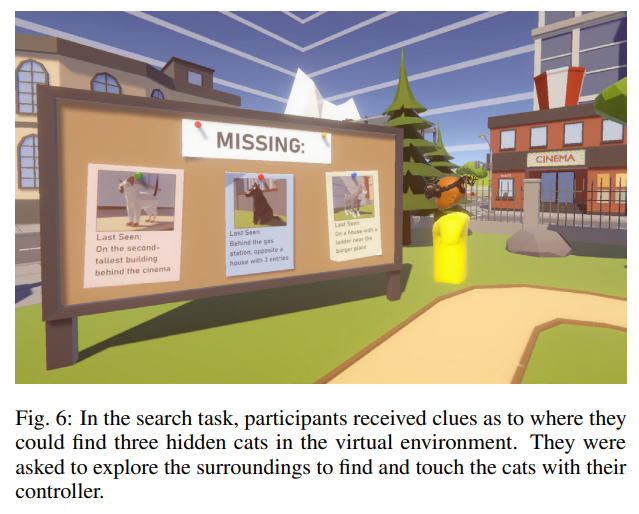
- 세 가지 다른 인스턴스를 디자인 -> 이 작업에서 참가자들은 가상 도시의 30m 이상의 높은 고도(열기구나 비행기 위 등), 약 10m 정도의 중간 고도(지붕 위 등), 그리고 지면에 숨겨진 세 마리 고양이를 찾아야 했습니다.
- 참가자들을 돕기 위해 각 검색의 시작 위치에는 세 마리 고양이의 위치에 관한 세 문장의 단서가 기록된 가상 게시판이 배치되었습니다(그림 6 참조).
- 참가자들은 필요할 경우 항상 시작 위치로 돌아가 단서를 다시 읽을 수 있었습니다. 이 작업은 경로 따라가기 작업과는 달리 덜 제약이 있어 참가자들이 자체적으로 경로 계획을 수행해야 했습니다.