
▋ 개요
프로젝트명 : DC 모터 컨트롤러
기획 및 제작 : 박순창
분류 : 메인 프로젝트 (개인)
시작/제작 기간 : 23.10.00 ~ 23.10.00 (1일)
진행상태: 스펙 정의 - 기능 검증 - RTL 생성 - 시뮬레이션 - 합성 및 배선진행중
사용 툴:Vivado,Xcelium,Genus,Innovus
사용 도구:FPGA
▋ 설명
▶ 개발 동기
DC모터 2개를 컨트롤 하는 드라이버 설계
▶ Spec
ㅇDA 모터
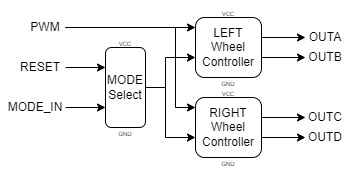
- 내부 구조
1) MODE Selector
2) Wheel PWM Controller
- 핀 구조
1) PWM
2) INA, INB, INC
3)
▶ Diagram
-
System Diagram
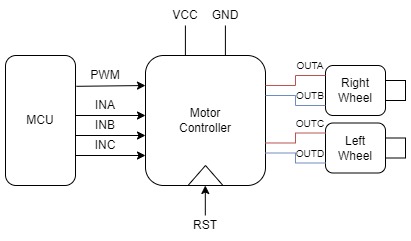
-
Block Diagram
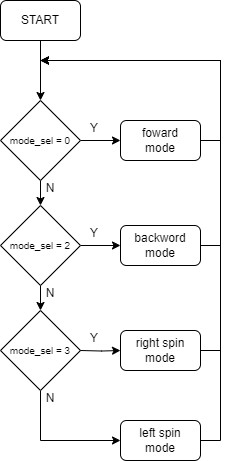
▶ 알고리즘

▋Code
- DC_Motor_Controller.v
`timescale 1ns/1ps
module DC_Motor1 (pwm_in, rst, mode_Sel, pwm_Ra, pwm_Rb, pwm_La, pwm_Lb);
input pwm_in;
input rst;
input [2:0] mode_Sel;
output reg pwm_Ra;
output reg pwm_Rb;
output reg pwm_La;
output reg pwm_Lb;
parameter STANDBY = 0;
parameter FORWORD = 1;
parameter BACKWORD = 2;
parameter RIGHT_TURN = 3;
parameter LEFT_TURN = 4;
parameter BRAKE = 5;
reg [2:0] mode;
always @(*) begin
if(rst) mode <= STANDBY;
else begin
case (mode_Sel)
3'b000: mode <= STANDBY;
3'b001: mode <= FORWORD;
3'b010: mode <= BACKWORD;
3'b011: mode <= RIGHT_TURN;
3'b100: mode <= LEFT_TURN;
3'b101: mode <= BRAKE;
default: mode <= STANDBY;
endcase
end
end
always @(*) begin
case(mode)
STANDBY: begin
pwm_Ra <= 1'b0;
pwm_La <= 1'b0;
pwm_Rb <= 1'b0;
pwm_Lb <= 1'b0;
end
FORWORD: begin
pwm_Ra <= pwm_in;
pwm_La <= pwm_in;
pwm_Rb <= 1'b0;
pwm_Lb <= 1'b0;
end
BACKWORD: begin
pwm_Ra <= 1'b0;
pwm_La <= 1'b0;
pwm_Rb <= pwm_in;
pwm_Lb <= pwm_in;
end
RIGHT_TURN: begin
pwm_Ra <= 1'b0;
pwm_La <= pwm_in;
pwm_Rb <= pwm_in;
pwm_Lb <= 1'b0;
end
LEFT_TURN: begin
pwm_Ra <= pwm_in;
pwm_La <= 1'b0;
pwm_Rb <= 1'b0;
pwm_Lb <= pwm_in;
end
BRAKE: begin
pwm_Ra <= pwm_in;
pwm_La <= pwm_in;
pwm_Rb <= pwm_in;
pwm_Lb <= pwm_in;
end
endcase
end
endmodule- DC_Motor_Controller_tb.v
`timescale 1ns/1ps
module DC_Motor1_tb;
reg pwm_in, rst;
reg [2:0] mode_Sel;
wire pwm_Ra, pwm_Rb, pwm_La, pwm_Lb;
DC_Motor1 dc1 (pwm_in, rst, mode_Sel, pwm_Ra, pwm_Rb, pwm_La, pwm_Lb);
task expect;
input [2:0] mode;
if(rst) begin
if(pwm_Ra || pwm_Rb || pwm_La || pwm_Lb) begin
$display("rst TEST OK");
end
else begin
$display("rst TEST FAILED");
$display("At time %0d rst=%b Ra=%b Rb=%b La=%b Lb=%b",
$time, rst, pwm_Ra, pwm_Rb, pwm_La, pwm_Lb);
$finish;
end
end
endtask
initial forever begin
#3 pwm_in <= ~pwm_in;
#7 pwm_in <= ~pwm_in;
#1 pwm_in <= ~pwm_in;
#9 pwm_in <= ~pwm_in;
#5 pwm_in <= ~pwm_in;
#5 pwm_in <= ~pwm_in;
end
initial begin
$display("test start");
pwm_in <= 1'b0; rst <= 1'b0;
#10 mode_Sel <= 3'd0; $display("STANDBY TEST OK");
#10 mode_Sel <= 3'd1; $display("FORWORD TEST OK");
#10 mode_Sel <= 3'd2; $display("BACKWORD TEST OK");
#10 mode_Sel <= 3'd3; $display("RIGHT_TURN TEST OK");
#10 mode_Sel <= 3'd4; $display("LEFT_TURN TEST OK");
#10 mode_Sel <= 3'd5; $display("BRAKE TEST OK");
#10 rst <= 1'b1; expect (mode_Sel);
#10 $display("test fisnish");
$finish;
end
endmodule▋Test
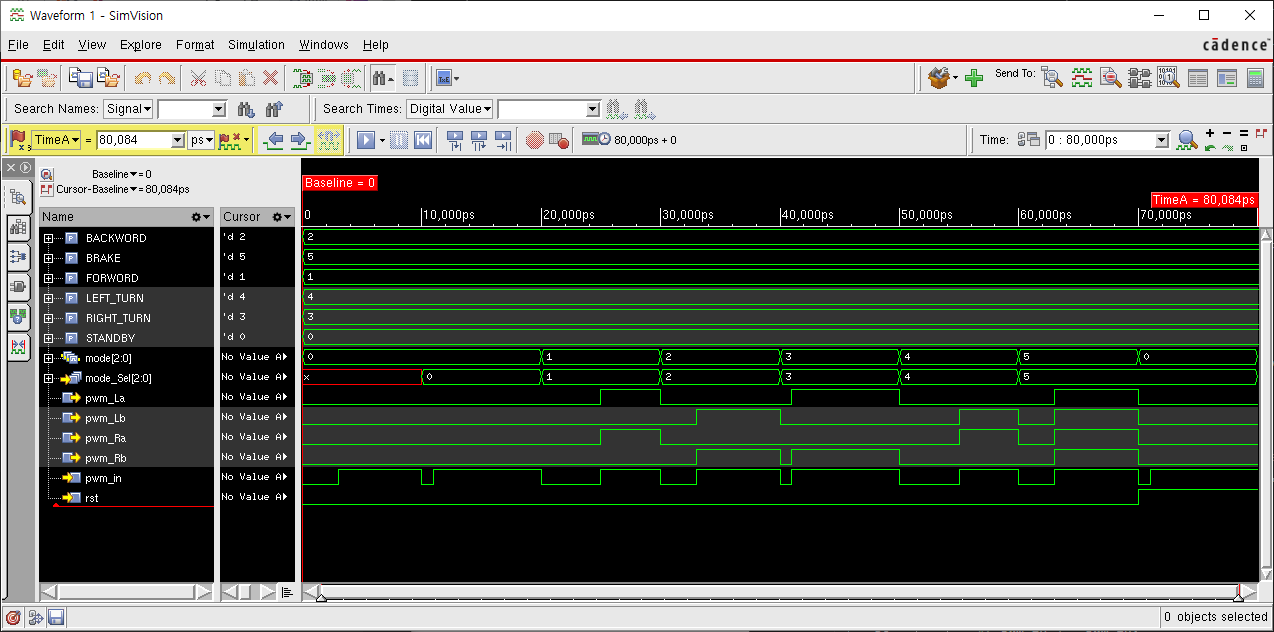
▶ Simulation
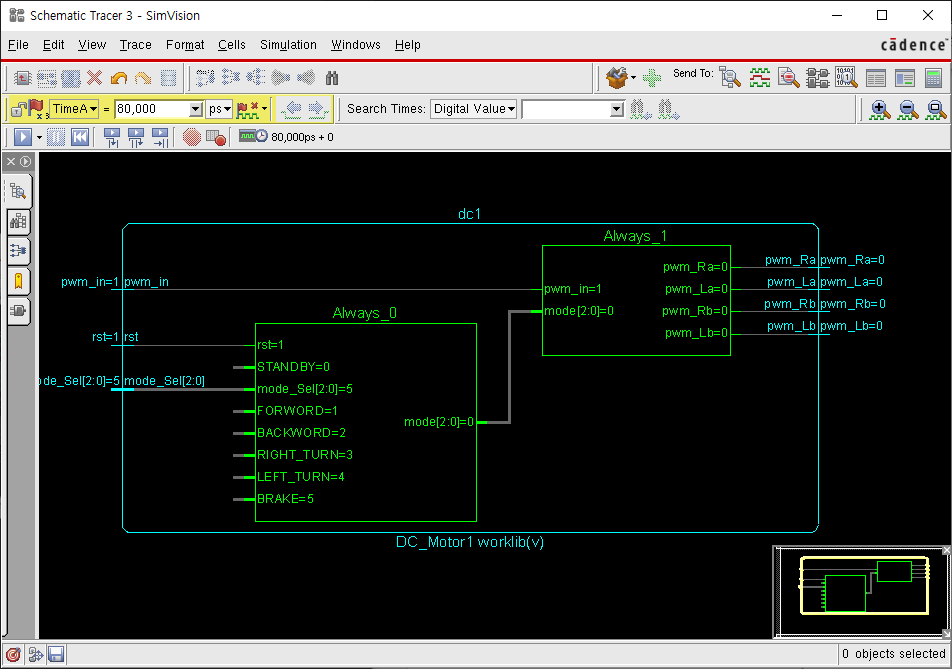
- Waveform
- Block Diagram
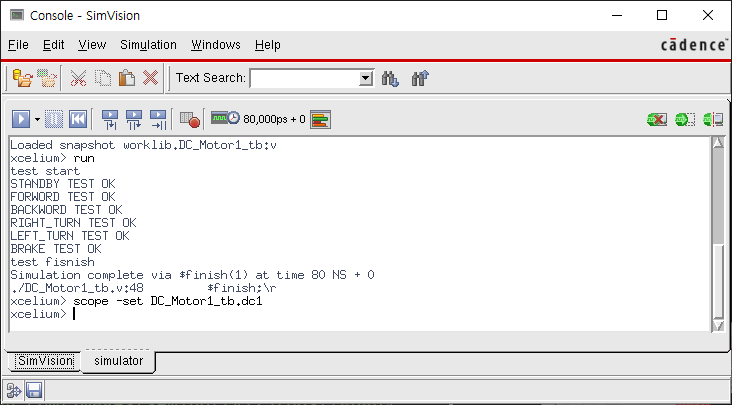
- Log
▶ Synthesis
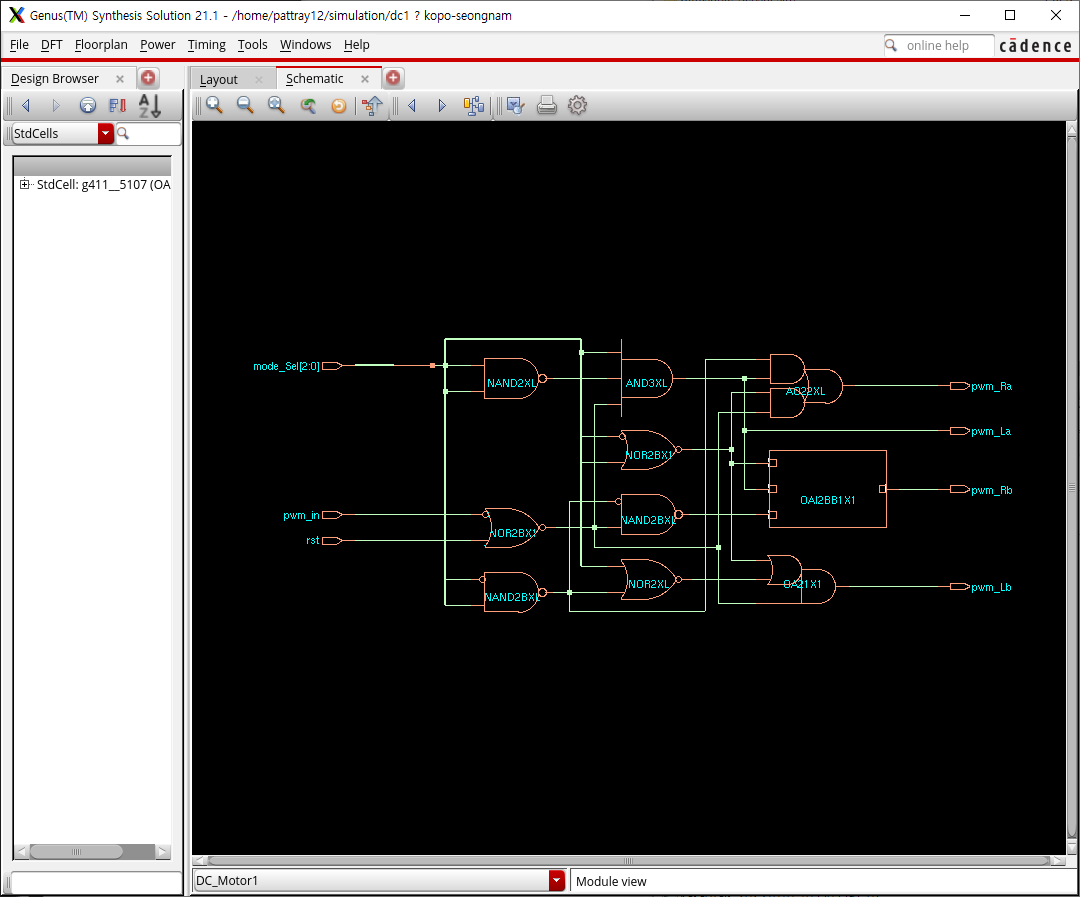
- 교육용으로 제공된 cell library 사용
- Schematic
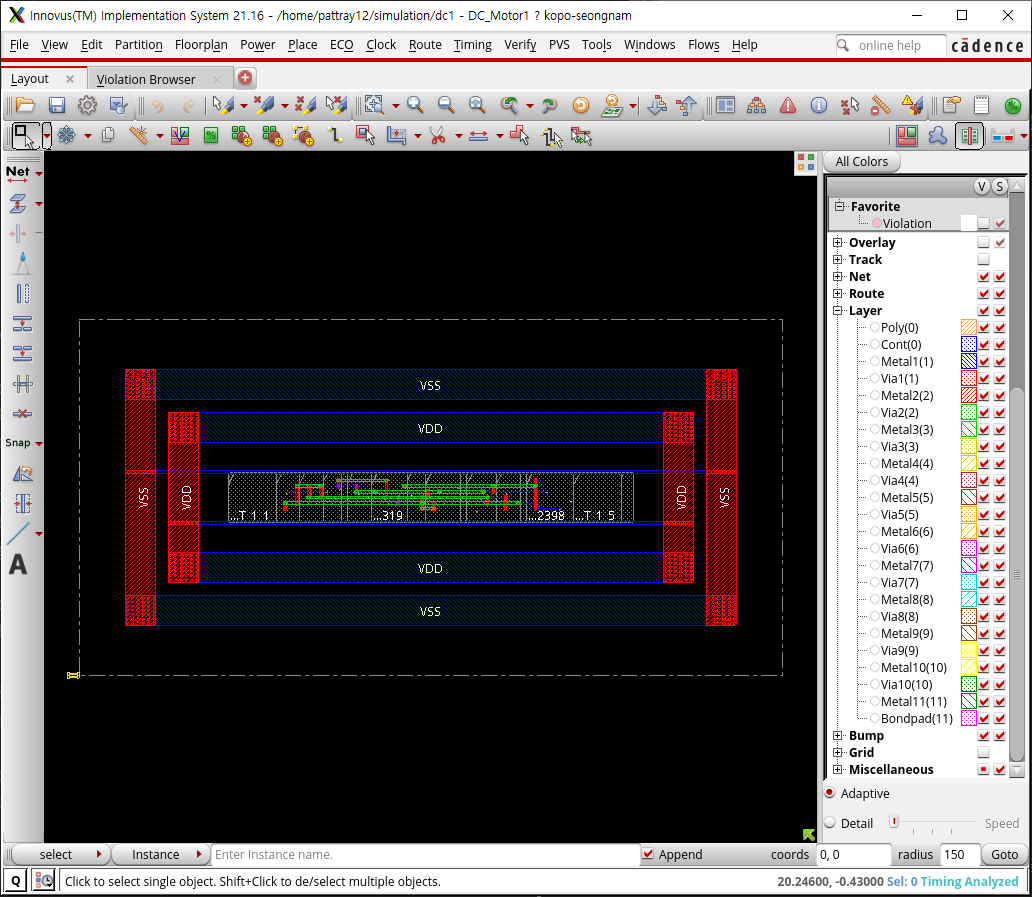
▶ PnR
- Layout
▋결론
- ㅇ
▋link
- Youtube:
- github:
개인 공부 겸 포트폴리오 사이트