STM32
1.STM32 - INTRO

rev.2502211007 : 첫 작성.앞으로 STM32의 사용법을 학습해보자.학습방법은 STM32 MCU에서 제공하는 Peripherals를 다뤄볼 것이다.Peripherals는 MCU의 코어 CPU(ARM Cortex)를 제외한 GPIO, ADC, USART, Ti
2.STM32 - INTRO(2)
rev. 2502211105 : 첫 작성.사실 INTRO를 지난 포스팅에서 끝내려고 했다.내 학습 방법과 순서에 대해서 정리하고 기록하려고는 용도로만 작성하려고 했기 때문이다.그럼에도 두번째 인트로를 작성하는 이유는 본격적인 Peripherals를 다루기 앞서, MCU
3.STM32 - Timer
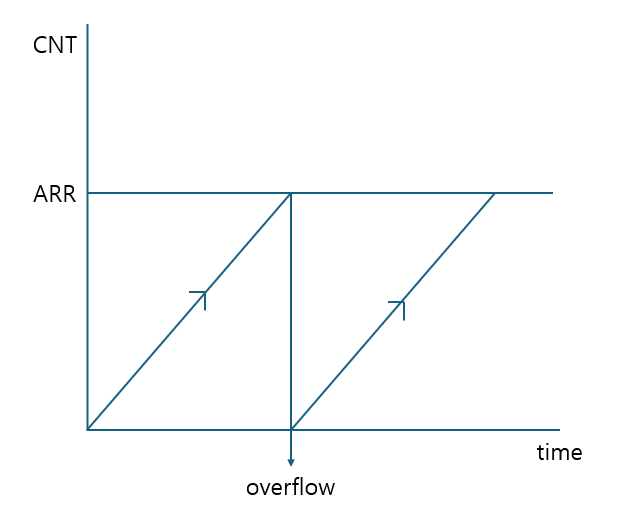
이 포스팅을 통해 ST사 MCU의 장치 중 하나인 Timer에 대해서 알아보자. > Timer의 개념 Timer는 어플리케이션의 시간 기반 작업을 처리하기 위한 요소이다. 즉, 어떤 시간 동안 혹은 후에 특정 작업을 수행해야 된다고 할 때, 시간을 계산해주는 장치이
4.STM32 - USART/UART
rev.2502211937 : 첫 작성. 이 포스팅에서는 USART에 대해서 알아보자. > USART 개념
5.STM32 - RTC
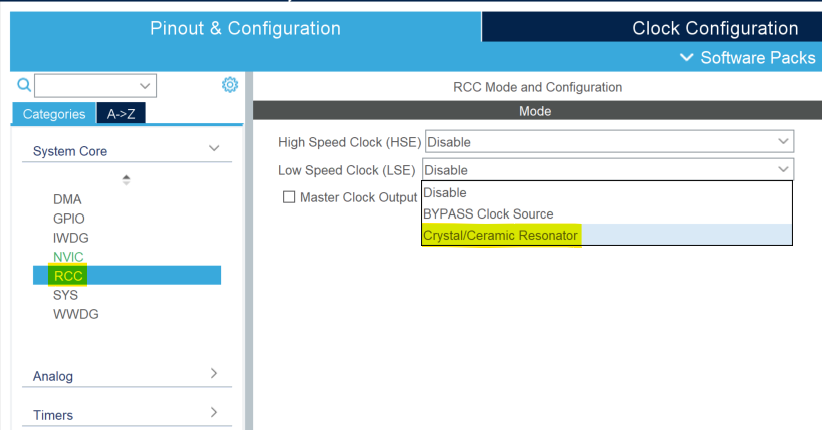
rev. 2502241046 : 첫 작성. 오늘은 RTC에 대해서 학습해보자. STM32에서는 RTC를 내장해서 제공해주고 있다. RTC는 처음 다뤄보니 RTC가 무엇인지부터 확인해보자. > RTC RTC는 Real Time Clock의 약어이다. 이 장치의
6.STM32 - SPI
오늘은 SPI 통신에 대해서 학습해보자. 마찬가지로 내가 사용하는 MCU에서는 SPI 통신을 지원한다. 우선 SPI가 무엇인지부터 알아보자. > SPI SPI는 Serial Peripherals Interface의 약자이다. MCU가 주변 장치와 데이터를 교환하
7.STM32 - Interrupt(feat.GPIO)
이 포스팅에서는 지난 Interrupt 개념에 이어, STM32 MCU로 GPIO를 Interrupt 설정하여 제어해볼 것이다. 지난 Polling 방식으로 GPIO를 통해 스위치 입력을 받았을 때는 스위치를 한번 누를 때마다 해당 프로그램이 여러번 동작하는 에러가
8.STM32 - DMA
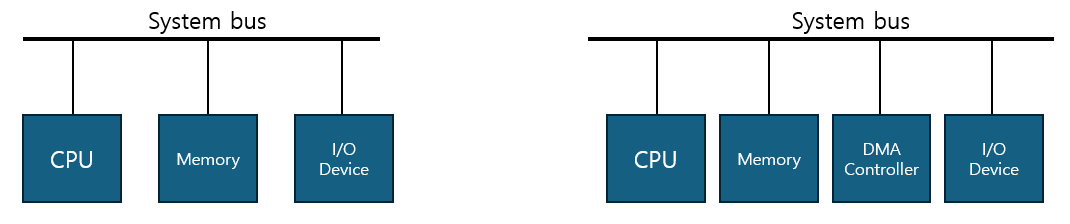
rev.2503041454 : 첫 작성.이번엔 DMA에 대해 알아보자.여느 때와 마찬가지로 DMA가 무엇인지에 대한 것부터 알아보자.DMADMA는 Direct Memory Access의 약어이다.앞서 배웠던 Polling 방식이나 Interrupt 방식 모두 I/O 장
9.STM32 - CAN
rev.2503051545 : 첫 작성.오늘은 CAN통신에 대해서 배워보자.우선 개념부터 알아보자.CANCAN은 Controller Area Network의 약자이다.말 그대로, Controller 장치 간 Network를 구성해서 통신하는 프로토콜을 얘기한다.해당 통