Jetson Nano에 ROS2 Foxy 설치하기
Jetson Nano에 ROS2 Foxy를 설치하는 방법을 안내합니다. 이 과정에서는 Ubuntu 20.04가 필요하며, ROS2 Foxy는 이 버전과 호환됩니다.
1. 사전 준비
- Jetson Nano (Ubuntu 20.04 설치 완료)
- 터미널을 사용하여 설치를 진행합니다.
2. 설치 방법
ROS2 Foxy를 설치하는 두 가지 방법이 있습니다.
방법 1: GitHub 스크립트 사용
- 터미널 열기 (Ctrl + Alt + T)
- git 설치:
sudo apt install git -y - 설치 스크립트 다운로드:
git clone https://github.com/t-shaped-person/quick-ros2-setup.git - 스크립트 실행:
스크립트가 완료되면 Jetson Nano가 자동으로 재부팅됩니다.cd quick-ros2-setup ./1_ros2_foxy_install.sh
방법 2: ROS 공식 문서에 따른 수동 설치
이 방법은 ROS2 Foxy 공식 설치 가이드를 참고합니다.
-
ROS2 패키지 소스 설정:
sudo apt update && sudo apt install curl -y sudo curl -sSL https://raw.githubusercontent.com/ros/rosdistro/master/ros.asc | sudo apt-key add - sudo sh -c 'echo "deb [arch=arm64] http://packages.ros.org/ros2/ubuntu $(lsb_release -cs) main" > /etc/apt/sources.list.d/ros2-latest.list' -
ROS2 패키지 설치:
sudo apt update sudo apt install ros-foxy-desktop -y -
ROS2 환경 설정:
설치가 완료되면, ROS2 명령어가 잘 실행되도록 환경 설정을 합니다.echo "source /opt/ros/foxy/setup.bash" >> ~/.bashrc source ~/.bashrc
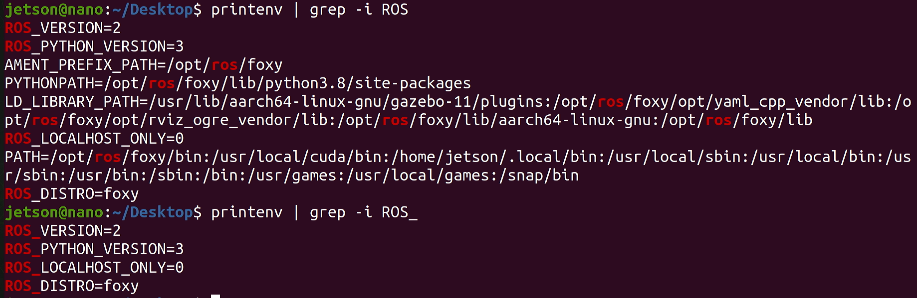
3. 설치 확인
터미널에서 다음 명령어를 입력하여 설치를 확인합니다:
printenv | grep -i ROS
printenv | grep -i ROS_버전 정보가 표시되면 설치가 성공한 것입니다.
추가 설정
Jetson Nano에서 원활한 성능을 위해 스왑 파일을 추가로 설정할 수 있습니다:
sudo fallocate -l 4G /swapfile
sudo chmod 600 /swapfile
sudo mkswap /swapfile
sudo swapon /swapfile
echo '/swapfile none swap sw 0 0' | sudo tee -a /etc/fstab결론
이제 Jetson Nano에서 ROS2 Foxy를 사용할 준비가 완료되었습니다. 설치가 완료되었으므로, 다양한 ROS2 패키지를 설치하고 테스트할 수 있습니다.

student studying Embedded-development