Data Link Control Protocols
Our discussion so far has concerned sending signals over a transmission link .
For effective digital data communications, much more is needed to control
and manage the exchange. In this chapter, we shift our emphasis to that of
sending data over a data communications link . To achieve the necessary control,
a layer of logic is added above the physical layer discussed in Chapter 6;
this logic is referred to as data link control or a data link control protocol .
When a data link control protocol is used, the transmission medium between
systems is referred to as a data link .지금까지 transmission link를 통해 신호를 보내는것만 배워왔다면, 이젠 효과적인 디지털 데이터 통신을 위해 무엇이 필요한지 배워볼것이다.
- 데이터 통신 링크를 통해 데이터를 전송한다는 강조점에 집중
- 필요한 제어를 달성하기 위해, 로직 레이어가 6장에서 소개된 물리적 계층에 추가될것이다
- 데이터 링크 제어 프로토콜을 사용하는 경우, 시스템간의 전송 매체를 데이터 링크라고 정의한다
Data Link Control Protocols
To see the need for data link control, we list some of the requirements
and objectives for effective data communication between two directly connected
transmitting-receiving stations:
• Frame synchronization: Data are sent in blocks called frames. The beginning
and end of each frame must be recognizable. We briefly introduced
this topic with the discussion of synchronous frames (Figure 6.2).
• Flow control: The sending station must not send frames at a rate faster
than the receiving station can absorb them.
• Error control: Bit errors introduced by the transmission system should
be corrected.
• Addressing: On a shared link, such as a local area network (LAN), the
identity of the two stations involved in a transmission must be specified.
• Control and data on same link: It is usually not desirable to have a
physically separate communications path for control information.
Accordingly, the receiver must be able to distinguish control information
from the data being transmitted.
• Link management: The initiation, maintenance, and termination of a
sustained data exchange require a fair amount of coordination and cooperation
among stations. Procedures for the management of this exchange
are required.데이터 링크 제어의 필요성을 확인하기 위해, 연결된 전송부와 수신부의 효과적인 데이터 통신을 위한 몇가지 요구사항과 목적을 확인해볼 필요가 있다.
1. Frame sychronization: 데이터는 프레임이라는 블록 안으로 전송되게 된다. 각 프레임의 시작점과 끝점은 인식가능해야한다. (6.2장에서 동기화된 프레임에 대해 간단히 배웠었다)
2. Flow control: 전송부는 수신부가 수용할수 있는 용량 이상으로 빠르게 프레임들을 전송해서는 안된다
3. Error control: 전송 과정중에 의해 발견된 Bit에러는 수정되어야 한다
4. Addressiog: LAN(Local Area Network)와 같은 공유 링크에서 전송에 관련된 두 기지국은 특정지어져야 한다.
5. Control and data on same link: Control information에 대해 물리적으로 분리된 communications path를 갖는것은 바람직하지 않다. 그러므로 수신기는 제어 정보와 송신되는 데이터를 구별할 수 있어야 한다.
6. Link management: 지속적인 데이터 교환의 초기화, 유지, 종료를 위해서는 스테이션간의 상당한 조정과 협력이 필요하다. 이런 데이터 교환의 관리를 위한 절차가 필요하다.
Flow Control
- 송신 엔티티가 데이터로 수신 엔티티를 압도하지 않도록 보장하는 기술
- 수신 엔티티는 일반적으로 전송을 위해, 어떤 최대 길이의 데이터 버퍼를 할당한다
- 데이터가 수신되었을때, 수신 엔티티는 더 높은 레벨의 소프트웨어로 데이터를 전송하기 전에 상당한 작업을 거쳐야한다. - Flow Control이 없으면, 수신기가 오래된 데이터를 처리하는동안 채워지고 오버플로우 될 수 있다.
Stop-and-Wait Flow Control
- 가장 간단한 형태의 flow control이다
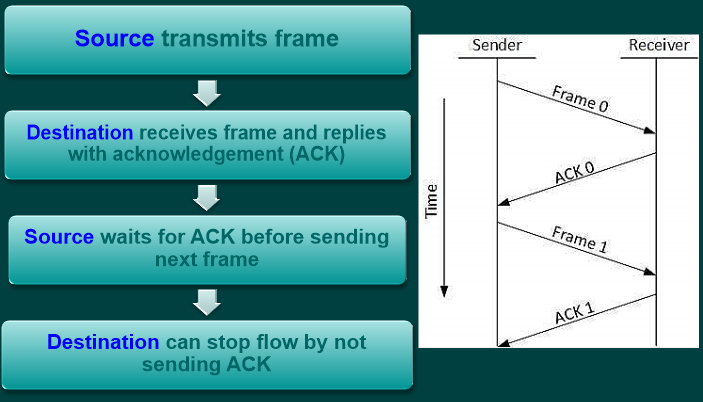
- Source가 프레임을 전송한다
- Destination이 프레임을 수신하고, 확인신호(ACK)로 Source 응답한다
- Source가 다음 프레임을 전송하기 전에 확인신호(ACK)를 기다린다
- Destination은 확인신호(ACK)를 보내지 않음으로서 flow를 방지할 수 있다
- 이 과정은 몇개의 큰 프레임으로 전송될 때는 잘 작동하며, 사실, 거의 개선할 여지가 없다.
그러나 출발지가 종종 큰 데이터 블록을 작은 블록으로 나누어 데이터를 여러 프레임으로 전송하는 경우가 흔하다. 왜냐하면,
- 수신자의 버퍼 크기가 한계가 있을 수 있다
- 더 긴 전송은 오류가 발생할 가능성이 높아지고, 전체 프레임을 재전송해야 할 수도 있다.
작은 프레임을 사용하면 오류도 더 빨리 감지되고, 재전송할 확률이 낮아진다 - LAN과 같은 공유 매체에서는 하나의 프레임이 매체를 오랜 기간 동안 점유하지 않도록 하여 다른 송신 프레임들에서 발생하는 긴 지연을 방지하기 위해 작은 프레임을 사용하는 것이 일반적이다
만약, 여러 프레임을 사용하여 단일 메세지를 전송한다면?
- Stop-and-Wait 절차가 부적절할수도 있다. 다중 프레임 사용의 한계가 생기기 때문.
여러 프레임을 사용하여 메세지를 전송할때, Stop-and-wait 절차는 한번에 한 프레임만 저송될 수 있다는 본질적인 문제가 생긴다. - 이를 설명하기 위해 link 의 비트 길이를 정의해보자
x
- B = 링크의 길이 (bit로 표시됨)
- R = 링크의 데이터 전송률(bps로 표시됨. bits per second)
- d = 링크의 길이 또는 거리(meters)
- V = 전파 속도 (m/s, meters per second 로 표시됨)
- 링크의 비트 길이가 프레임의 길이보다 큰 경우, 심각한 효율성 저하가 발생하게 된다.
- 전송 시간은 한 스테이션에서 프레임을 전송하는 데 걸리는 시간을 나타낸다. 이 시간을 1로 설정해보자
- 전파 지연시간을 'a'라고 하고, 비트의 길이인 'B'를 프레임의 비트 수 'L'로 나누면 그 값이 나온다.
- 이 공식에 따라서 a > 1 경우, 전파 시간이 전송 시간보다 길어져, 송신자는 프레임을 모두 전송한 후에야 프레임의 처음 비트가 수신자에 도착했음을 의미하게 된다.
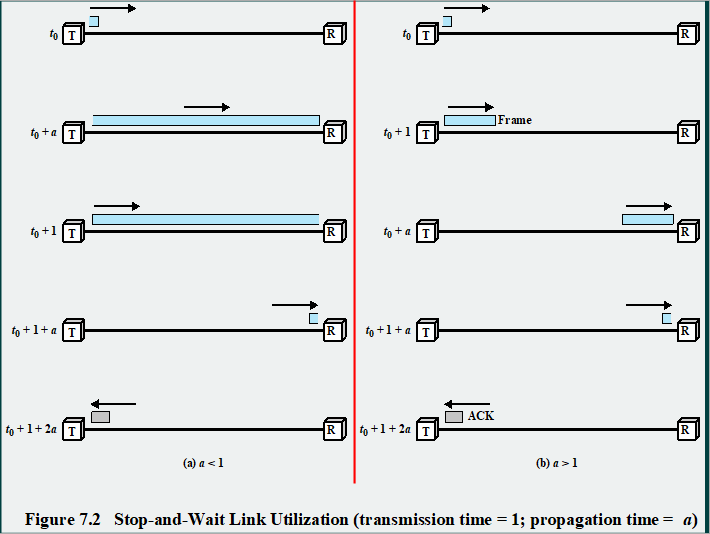
이 그림을 보면 더 이해가 될것이다.
데이터의 길이가 너무 긴 경우(a>1), Receiver에게 데이터가 완전히 전송될때까지 ACK를 전송하지 못해서 비효율적이고,
데이터의 길이가 너무 짧은경우(a<1), 마찬가지로 Receiver에게 전달되는 시간이 오래 걸리게 된다. 즉, 라인 활용에 있어서 큰 비효율을 보이고있다.
그래서 새로운 방법의 데이터 전송 방식이 탄생하게 되는데,
Sliding Windows Flow control
- 이전에 한번에 하나의 프레임만 전송될때 발생하는 문제를 해결하기 위해 새로운 방식의 전송방식을 찾게 되었다.
- 여러개의 번호가 지정된 프레임들을 전송할 수 있다.
- 수신 버퍼 크기: W개의 프레임
- 송신자는 확인을 기다리지 않고, 최대 W개의 프레임을 전송
- 확인에는 다음에 기대되는 프레임의 번호가 포함된다
- 프레임은 2k로 나눈 나머지로 번호가 매겨진다
- 최대 window size는 2k-1개
- 수신자는 확인을 보내면서 다이상의 전송을 허용하지 않을 수 있음
- 향후 전송을 금지하는 메세지를 보내면, 나중에 정상 확인 메세지를 보내야함
이해해보자,
- 다중 프레임을 동시에 전송하는 방법: 효율성을 향상시키기 위해, 두 스테이션 A와 B가 Full-Duplex 링크로 연결되어 있다고 가정하자.
- 수신 스테이션 B는 W개의 프레임에 대한 버퍼 공간을 할당한다. 따라서 B는 W개의 프레임을 수용하고, 송신 스테이션 A는 확인신호(ACK)를 기다리지 않고 W개의 프레임을 전송할 수 있다.
- 각 프레임에는 k-bit 시퀀스 번호가 매겨진다. 이는 0부터 2k-1까지의 범위를 가지며, 프레임은 2k로 나눈 나머지로 번호가 매겨진다. 이로써 최대 창 크기는 2k-1이 된다.
- B는 다음에 기대되는 프레임의 시퀀스 번호를 포함한 확인을 보내, 프레임을 확인한다
- 수신 스테이션에서 Receive Not Ready(RNR)메세지를 보내면 데이터 흐름을 중단할 수 있다.
이는 이전에 받은 프레임을 확인하지만 미래의 프레임 전송을 금지한다.- 대충 예를 들자면, 윈도우를 초콜릿 전체라고 보고, 프레임은 초콜릿 한조각이라고 생각하면 좀 이해하기 편할것이다.

3비트의 시퀀스 번호, 즉 k=3일때를 가정한 경우 프레임은 0~7까지의 번호가 매겨진다. 그 후, 동일한 번호가 후속 프레임에서 재사용된다.
초콜릿으로 비유를 들어 설명해보자면,...여러 초콜릿 조각을 만들어 소비자에게 전달해야하는데, 여러개의 초콜릿을 한번에 상자에 담아 보낼 수 있다고 생각해보자.
1. 윈도우 크기 = 상자의 용량
- 상자의 크기는 담을 수 있는 초콜릿 조각의 갯수를 나타낸다. 윈도우 크기가 3이라면, 상자에는 최대 3개의 초콜릿 조각을 담을 수 있다.
- 프레임은 초콜릿 조각
- 데이터 전송에서 프레임은 초콜릿 조각과 비슷하다. 상자(윈도우)의 크기에 맞추어 여러개의 초콜릿(프레임)을 한 번에 전송할 수 있다.
- 프레임 전송과 초콜릿 전달
- 상자(윈도우)에는 윈도우 크기에 맞게 선택된 초콜릿 조각(프레임)이 담겨져 있다. 이 초콜릿 조각을 한 번에 소비자(수신자)에게 전달한다.
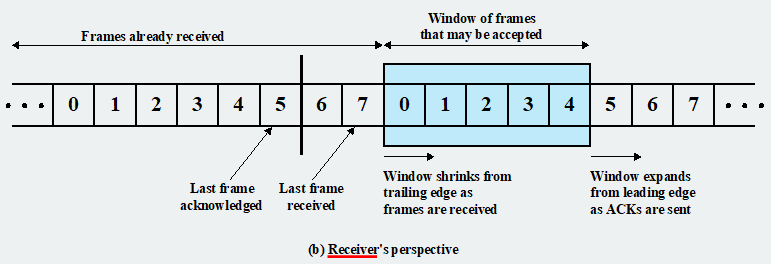
- 확인과정과 감사 표시
- 소비자가 초콜릿을 받으면 감사 표시(확인 신호)를 한다. 확인을 받은 초콜릿은 상자(윈도우)에서 빠져나가고, 더 많은 초콜릿을 담을 수 있게 된다.
- 미확인 초콜릿은 예비 초콜릿:
- 감사 표시를 받지 못한 초콜릿은 여분으로 버퍼링되어있다. 이런 초콜릿은 필요할 때 재전송 가능.
Error Control Techniques
말 그대로 에러 제어 방법, 프레임 전송중에 발생한 오류를 감지하고 수정하는 매커니즘을 의미한다. 데이터는 프레임의 연속으로 전송되며, 프레임은 저송된 순서대로 도착하고, 각 전송된 프레임은 수신될때 두 가지 유형의 오류가 발생할 수 있는 가능성이 있다.
-
손실된 프레임: 반대쪽에 아예 프레임이 도착하지 않는경우. 네트워크의 경우 네트워크가 단순히 프레임을 전달하지 않을 수 있다. 직접적인 포인트 투 포인트 데이터 링크의 경우 노이즈 버스트가 프레임을 손상시켜 수신자가 프레임이 전송된 것을 알 수 없을 수 있다.
-
손상된 프레임: 인식 가능한 프레임이 도착하지만 일부 비트가 전송중에 변경되어서 오류가 있는 경우.
이 두가지 경우에 대해 4가지 에러 제어를 위한 기술을 제시할 수 있다.
- 에러 감지(Error detection): 수신자에게 도착은 했지만 오류가 있는 프레임을 구별해 내고, 해당 프레임을 폐기하는 방식
- 긍정적인 확인(Positive acknowledgment): 정삭적으로 수신된 프레임들에 대해 정상 수신 신호를 보낸다.
- 타임아웃 후 재전송(Retransmission after timeout): 송신자는 일정 시간이 경과한 후에 확인되지 않은, 누락된 프레임을 재전송한다.
- 부정적인 확인 및 재전송(Negative acknowledgment and retransmission): 수신자는 오류가 감지된 프레임에 비정상 수신 신호를 반환하고, 송신자는 이런 프레임을 재전송한다
Automatic Repeat Request(ARQ)
위에서 설명한 메커니즘을 통틀어 자동 반복 요청, ARQ라고 한다. ARQ의 효과는 잠재적으로 신뢰성이 없는 데이터 링크를 신뢰성 있는 데이터 링크로 변환하는 것이다. ARQ의 세 가지 표준 버전 은 다음과 같다.
- Stop-and-wait ARQ
- Go-back-N ARQ
- Selective-reject ARQ
이제부터 각각 순서대로 살펴보자뭐 결국 Error handle의 방식 세가지를 소개한다는 소리이다
Stop-and-wait ARQ
개념
- Stop-and-wait ARQ는 이전에 배웠던 Stop-and-wait 플로우 컨트롤 기술에 기반한다
- 소스 스테이션은 단일 프레임을 전송후, 다음 확인(ACK)를 기다려야한다. 목적지 스테이션의 응답이 소스 스테이션에 도착할 때까지 다른 데이터 프레임을 전송할 수 없다.
어떤 오류가 발생할 가능성이 있을까?
- 데이터 프레임 자체가 손상이 되었을 경우:
- 첫 번째 유형의 오류는 전송된 데이터 프레임이 목적지에 도착할 때 손상되었을 경우이다.
- 수신자는 프레임을 받고 오류 감지 기술을 사용하여 프레임이 손상되었는지 여부를 감지한다
- 만약 손상이 감지되면 수신자는 해당 프레임을 폐기하고, 송신자에게 손상된 프레임에 대한 응답을 보내지 않는다
- 송신자는 프레임을 보낸 후 일정 시간 동안 확인을 기다리는데, 이를 위해 타이머를 사용한다. 확인이 제때 도착하지 않으면 송신자는 동일한 프레임을 다시 전송한다.
- 확인 메세지(ACK)가 손상되어있는 경우:
- 두 번째 유형의 오류는 목적지에서 송신자로 돌아가는 확인신호(ACK)가 손상되었을 경우이다
- 송신자는 프레임을 전송한 후 확인을 기다리는데, 이때 확인이 목적지에서 손상되면 제대로 된 확인이 오지 않을 수 있다.
- 이 경우 송신자는 일정 시간 동안 확인을 기다린 후에도 확인이 오지 않으면 동일한 프레임을 다시 전송한다.
Go-Back-N ARQ
개념
- "Go-Back-N ARQ"는 슬라이딩 윈도우 플로우 컨트롤을 기반으로 한 일반적인 에러 컨트롤 매커니즘이다.
- 윈도우 크기를 사용하여 미확인 프레임의 수를 제어한다
- 가장 많이 사용되는 에러 컨트롤 방식
마찬가지로 두가지 케이스가 있다
- 오류가 발생하지 않는 경우
- RR(Receive Ready) 또는 piggybacked acknowledgment를 통해 확인 작업이 이루어진다
그냥 확인 신호를 전송한다는 뜻이다
- RR(Receive Ready) 또는 piggybacked acknowledgment를 통해 확인 작업이 이루어진다
- 오류가 감지되는 경우
- 해당 프레임에 대한 REJ(reject=거부신호)를 보낼 수 있다
- 이 경우, 수신자는 해당 프레임과 그 이후에 들어오는 모든 프레임을 폐기하고, 오류가 있는 프레임이 올바르게 수신될 때까지 이전으로 돌아가 다시 전송을 시작하게 된다
잘못된 신호가 수신되면, 거부신호를 보내고 잘못된 신호 이후에 들어오는 프레임을 전부 폐기하고, 잘못된 프레임부터 다시 전송한다는 뜻
Selective-Reject ARQ
개념
- 선택적 거부 자동 반복 요청이라는 뜻
- SREJ신호, 즉 부정적인 확인 신호를 받거나 타임아웃이 발생한 경우에만 해당하는 프레임을 재전송하는 에러 제어 매커니즘
- Go-Back-N ARQ와의 차이점은, 프레임이 에러를 감지한다고해서 모두 재전송하는게 아니라, 오류가 발생한 그 프레임만을 재전송한다.
효율적이다
- 타임 아웃이나 SREJ를 받을때만 프레임을 재전송하므로 재전송양을 최소화하여 효율적이다.
- 프레임 재전송을 최소화한다는 뜻
그러나
- 복잡성 증가
수신자가 재전송되기를 기다리는 동안 재전송된 프레임을 저장하고 순서를 유지하는 등 복잡한 논리를 필요로 한다. 이로 인해 송수신 양측의 논리가 더 복잡해진다- 버퍼 요구량 증가
수신자가 에러가 발생한 프레임을 기다리는 동안 저장해야 하는 프레임의 양이 증가한다. 이로 인해 수신자 측에서 사용되는 버퍼 크기가 크게 증가할 수 있다- 프레임 재전송에 대한 논리 복잡성
송신자는 선택적으로 프레임을 재전송해야 하므로 순서에 맞지 않게 프레임을 보내는 데 필요한 논리가 더 복잡해진다
위와같은 이유때문에 일반적으로 사용되지 않는다.
그래도 장거리 위성 통신과 같이 전파 지연이 긴 환경에서 유리하다
전파 지연이 긴 만큼 신호를 주고받는 시간이 오래 걸리기때문에, 필요한 프레임만 전송하면 효율적이다
HDLC (High-level data link control)
가장 중요한 data link control protocol이다
- HDLC는 세 가지 유형의 Stations, 두 가지 Link Configurations 및 세 가지 Data Transfer Modes를 정의한다
-
3가지 스테이션(Stations):
primary station(주 스테이션),
secondary station(보조 스테이션),
combined station(통합 스테이션) -
2가지 링크 구성(Link Configurations):
Unbalanced(불균형),
balanced(균형) -
3가지 데이터 전송 모드(Data transfer modes):
normal response mode(NRM, 정상 응답 모드),
asynchronous balance mode(ABM, 비동기 균형 모드),
asynchronous response mode(ARM, 비동기 응답 모드)
HDLC는 전세계적으로 사용된다. 뿐만 아니라, 많은 다른 중요한 데이터 링크 제어 프로토콜의 기반이기도 하다. 대부분이 HDLC와 동일하거나 유사한 형식 및 메커니즘을 사용한다
Stations
-
Primary Station(주 스테이션): 링크 작업을 제어하는 책임이 있다. 주 스테이션에서 발행된 프레임을 명령이라고 한다
-
Secondary Station(보조 스테이션): 주 스테이션의 제어 하에 작동한다. 보조 스테이션이 발행한 프레임을 응답이라고 한다. 주 스테이션은 라인의 각 보조 스테이션과 별도의 논리적 링크를 유지한다
-
Combined Station(통합 스테이션): 주 스테이션 및 보조 스테이션의 기능을 결합한다. 통합 스테이션은 명령과 응답을 모두 발행할 수 있다.
Link Configurations
-
Unbalanced Configuration(불균형 구성): 하나의 주 스테이션 및 하나 이상의 보조 스테이션으로 구성되며 전이중 및 반이중 전송을 지원한다
-
Balanced Configuration(균형 구성): 두 개의 통합 스테이션으로 구성되며 전이중 및 반이중 전송을 지원한다
Data transfer modes
1. Normal Response Mode (NRM)
-
불균형한 구성에서 사용된다
-
Primary는 Secondary에게 데이터 전송을 시작할 수 있지만, Secondary는 Primary의 명령에 응답하는 방식으로만 데이터를 전송할 수 있다
-
NRM은 여러 단말이 호스트 컴퓨터에 연결된 다중 드롭 라인에서 사용된다
2. Asynchronous Balanced Mode(ABM)
-
균형된 구성에서 사용된다
-
양쪽 스테이션이 서로에게 허락을 받지 않고도 전송을 시작할 수 있다
-
ABM은 세 가지 모드 중에서 가장 널리 사용되며, 폴링 오버헤드가 없기 때문에 전 이중 포인트 투 포인트 링크의 효율적인 사용을 가능하게 한다.
-
가장 대중적으로 사용되는 방식
폴링 오버헤드란?
- 통신에서 사용되는 폴링(Polling) 방식에서 발생하는 추가 비용 또는 지연을 얘기한다
- NRM같은 경우, Primary가 Secondary에게 명령을 내리고, Secondary는 이에 응답해서 데이터를 전송하게 되는데, 이런 폴링 방식은 주기적으로 Primary가 Secondary에게 데이터를 요청하고 응답을 기다리는 구조를 갖고있다
- 이 응답을 기다리는 시간을 폴링 오버헤드라고 한다
3. Asynchronous Response Mode(ARM-비동기 응답 모드)
-
불균형 구성에서 사용된다
-
secondary는 primary의 명령 없이 전송을 시작할 수 있다
-
하지만 primary는 라인의 초기화, 오류 복구 및 논리적 연결을 포함한 책임을 유지한다
-
특수한 상황에 적용되는 방식이며, 드물게 사용됨
Synchronous Transmission
HDLC는 Synchronous Transmission을 사용한다
개념
- 데이터의 한 그룹, 즉 프레임 또는 패킷이라 불리는 데이터 블록이 한번에 전송된다
- 각 패킷의 시작과 끝은 때때로 동기화 문자(SYN)을 각 패킷의 시작/끝에 추가하여 표기하기도 한다
HDLC와의 관련성
- HDLC는 Synchronous Transmission을 사용한다
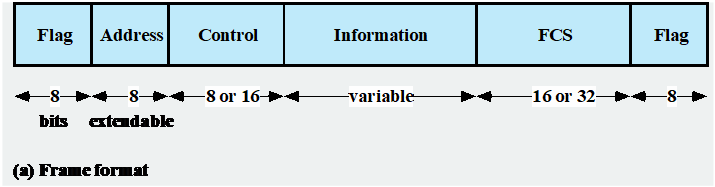
- 모든 전송은 프레임의 형식으로 이루어지며, 모든 종류의 데이터 및 제어 교환에 대해 하나의 프레임 형식이 사용된다
HDLC의 동기식
-
Flag: 프레임의 시작과 끝을 나타내는 고유한 패턴인 01111110로 프레임을 구분한다
-
문제점: 만약, 패턴 01111110이 프레임 내부에서 나타나면 동기화가 깨질 수 있다.
-
비트 스터핑을 통해 해결한다
비트 스터핑이란?
데이터 프레임 안에 01111110이 나타날 경우, 송신측에서는 0 다섯 번 뒤에 1을 하나 추가하여 01111110을 011111010으로 변환합니다. 수신측에서는 011111010을 다시 01111110으로 복원하고 정확한 프레임의 끝을 파악할 수 있게 됩니다. 이렇게 함으로써 동기화 문제를 방지하고 안정적인 데이터 전송이 가능해집니다.
그럼 변환된 프레임은 수신할때 어떻게 되나요?
- 그래서 다섯개의 1이 연속으로 나타나면 6번째에 0을 삽입한다
- 수신기는 시작Flag를 감지한 후 비트 스트림을 모니터링하면서 다섯 개의 1이 나타나면 여섯번째 비트를 확인한다
- 여섯번째 비트가 0이면 그걸 삭제하고, 1이면 일곱번째 비트를 확인하여 Flag로 판단한다.
Address Field
- 주소 필드, 즉 어떤 스테이션에게 이 프레임이 전송되는지 식별하는 역할을 해주는 필드이다.
- 주소 필드의 길이는 주로 8bit
- 필요에 따라 7비트의 배수로 더 길게 만들 수 있다
- 8bit의 가장 왼쪽 비트는 해당 8bit묶음, 즉 옥텟이 주소 필드의 마지막 옥텟인지에 대한 여부에 따라 1 또는 0이 된다.
- 각 옥텟의 나머지 7비트는 주소의 일부를 형성
- 11111111의 단일 옥텟 주소는 기본 및 확장 형식에서 모두 모든 스테이션에게 방송을 허용하기 위해 사용된다.
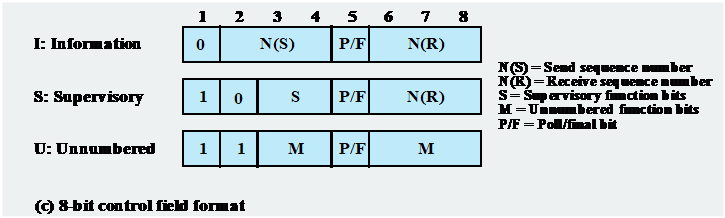
Control Field
HDLC는 세가지 유형의 프레임을 정의한다. 각각이 다른 제어 필드 형식을 가지고 있다.
1. Information frames (I-Frames):
- 사용자에게 전송되어야 하는 데이터를 운반
- 흐름 및 오류 제어 데이터는 정보 프레임에 ARQ 매커니즘을 이용하여 피기백된다
2. Supervisory frames(S-Frames):
- 정보를 운반하지 않는다
- Piggybacking이 사용되지 않을 대 ARQ 메커니즘을 제공한다
- S값에 따라 다음과 같은 역할을 함
- 00(RR): Positive Acknowledgment(긍정 확인)
- 01(REJ): Reject(거절)
- 10(RNR): Receive Not Ready(수신 준비 안됨)
- 11(SREJ): Selective Reject(선택적 거절)
3. Unnumbered frames(U-Frames):
- 보조 링크 제어 기능을 제공한다
- M1, M2, M3, M4, M5 및 32개의 추가 기능을 제공한다
Poll/Final(P/F)비트
- 제어 필드 포멧은 모두 폴/파이널(P/F)비트를 포함하고 있다
- 맥락에 따라 달라지는 사용법
- 명령 프레임에서는 P 비트로 언급된다
- 응답 프레임을 요청하기 위해 1로 설정됨
- 응답 프레임에서는 F 비트로 언급된다
- 요청 명령에 의해 전송된 응답 프레임을 나타내기 위해 1로 설정됨
백문이 불여일견
HDLC의 세 단계의 작동
- 초기화 단계:
두 측 중 하나는 데이터 링크를 초기화하여 프레임을 정돈된 방식으로 교환할 수 있도록 한다. - 데이터 및 제어 정보 교환 단계:
초기화 이후 두 측은 흐름 및 오류 제어를 실행하기 위해 사용자 데이터 및 제어 정보를 교환한다. 논리적인 연결이 설정되고 양쪽은 I-프레임에서 사용자 데이터를 교환할 수 있다 - 종료 신호 단계:
두 측 중 하나는 작업의 종료를 신호한다.
연결 종료는 disconnect(DISC)프레임을 전송하여 수행된다
