[4C4D: 4 Camera 4D Gaussian Splatting]([2604.04063] 4C4D: 4 Camera 4D Gaussian Splatting) (Junsheng Zhou, Zhifan Yang, Liang Han, Wenyuan Zhang, Kanle Shi, Shenkun Xu, Yu-Shen Liu /CVPR 2026)
Sparse camera setting에서 4D scene rendering을 가능하게 하고자 하는 연구
- appearance 와 geometry의 optimization 균형을 해결하는 방식
Problems
- Dynamic Scene Rendering을 consumer-level setting에서 가능하게 하고자 함.
➡️ sparse camera setting
- 저자들은 Sparse view setting에서 4DGS가 잘 안되는 이유는 편향된 optimization 때문이라고 함.
→ appearance를 학습하는 것은 비교적 쉬운데, geometry를 학습하는게 어려움.
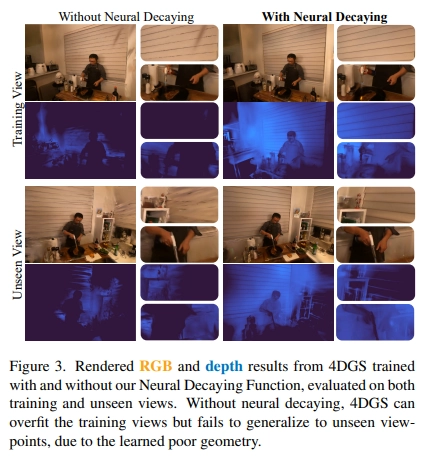
→ 학습한 각도에서는 잘 보이지만, unseen view에서는 기하 구조가 깨져서 noise와 artifact가 심함.
- 이 연구에서는 geometry와 appearance learning의 균형을 잘 조절해줄 수 있는
Neural Decaying Function을 도입하여 4대의 camera만으로 나름 괜찮은 퀄리티의 4D scene rendering을 수행함.
Methodology
- 이 연구는 이전에 살펴보았던 [4DGS 연구](Real-time Photorealistic Dynamic Scene Representation and Rendering with 4D Gaussian Splatting 리뷰)를 기반으로 함.
✅4D gaussian (geometric)+4D spherical harmonics (appearance)
- 4DGS에 geometry를 더 잘 학습할 수 있는 전략을 추가.
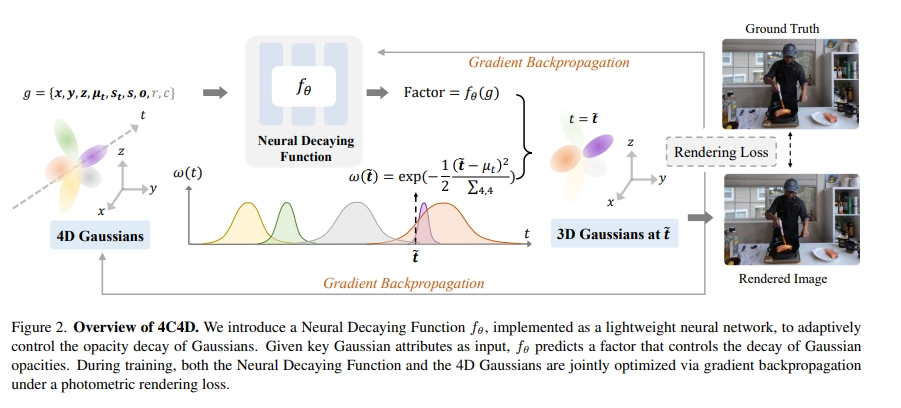
Neural Decaying Function
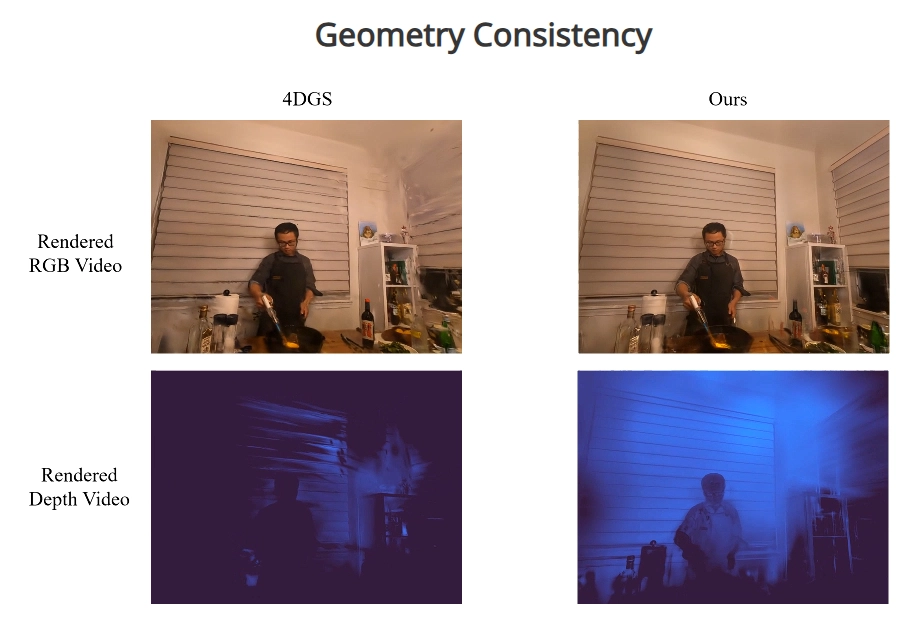
- 저자들은 sparse-view setting에서 4DGS를 최적화하면, appearance에 overfitting되고, geometric consistency를 무시하는 경향이 있다는 것을 실험적으로 밝혀냈음.
-
Appearance는 RGB로 Geometry는 Depth로 확인하였을 때, 공간적인 정보가 부족하여 일관적인 depth를 추출하지 못한 것을 확인할 수 있음.
-
이러한 관찰을 바탕으로 Geometric learning을 더 잘 할수 있도록
Neural opacity decaying control을 활용 -
간단한 network로 구현되는
Nerual Decaying Function는 각각의 4D gaussian primitive 정보를 받고decay factor를 출력 -
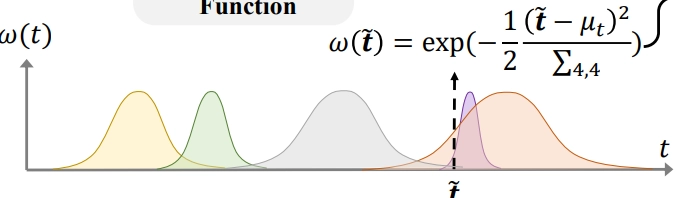
그리고 각 gaussian의 opacity를 조절. 그러면 timestep 에서 opacity는 아래와 같이 계산
-
앞에 exp는 원래 4DGS에서 time conditional prob나올 때 1D gaussian margin
-
해당 가우시안의 해당 시간에서 존재 여부 느낌 (일때 해당 가우시안은 가장 선명하게 존재.)
-
- 이 Neural decaying mechanism은 optimization gradient가 geometric learning에 더 집중할 수 있도록 도와줌
→geometry와appearance의 균형을 맞춤
✅ 쉽게 이해해보자면,, 가우시안의 opacity를 높게 설정하면, 뒤쪽의 기하 구조가 틀려도 rendering하는 앞쪽 외관만 그럴듯 하게 만들 수 있음. 불투명도를 낮추게 되면 여러 가우시안들이 화면 상 이미지에 관여하게 되므로 모델은 제대로 된 위치에 가우시안들을 배치해야지만 색상들을 재현할 수 있음.
Separate Decay Strategy based on Visibility
- 위에서 설명한 Neural Decaying Function을 모든 gaussian에 적용하면 효과가 좋지 않음. → 왜냐하면 4DGS의 gradient는 랜더링에 기여하는, 현재 카메라 뷰에서 보이는 영역으로만 흐르기 때문에, 보이지 않는 gaussian들에 를 적용하면 성능이 떨어짐
- 그래서
Visibility detection을 수행하여 보이는 가우시안에만 decay 전략을 적용하는 것으로 한다. ( : visible gaussians,
Experiments
https://junshengzhou.github.io/4C4D/
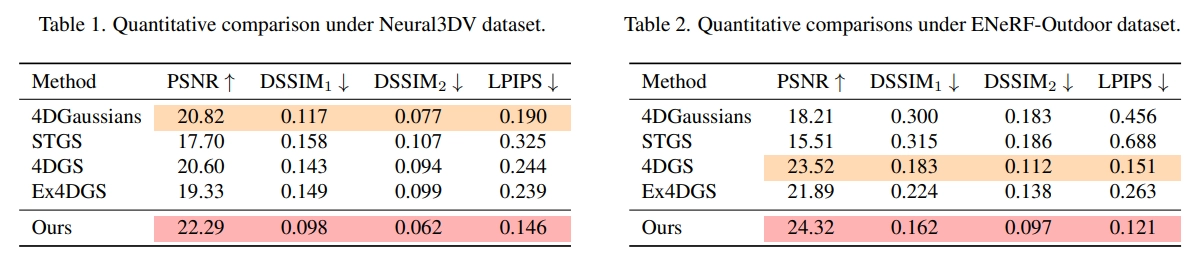
- 여러 카메라로 찍은 dynamic scene 데이터 중에서 4개의 카메라를 선택해서 rendering하고 나머지 중 선택해서 evaluate

- 직접 만든 데이터셋에 대해서도 검증 (GoPro-style 카메라 4대로만 촬영한 데이터셋)
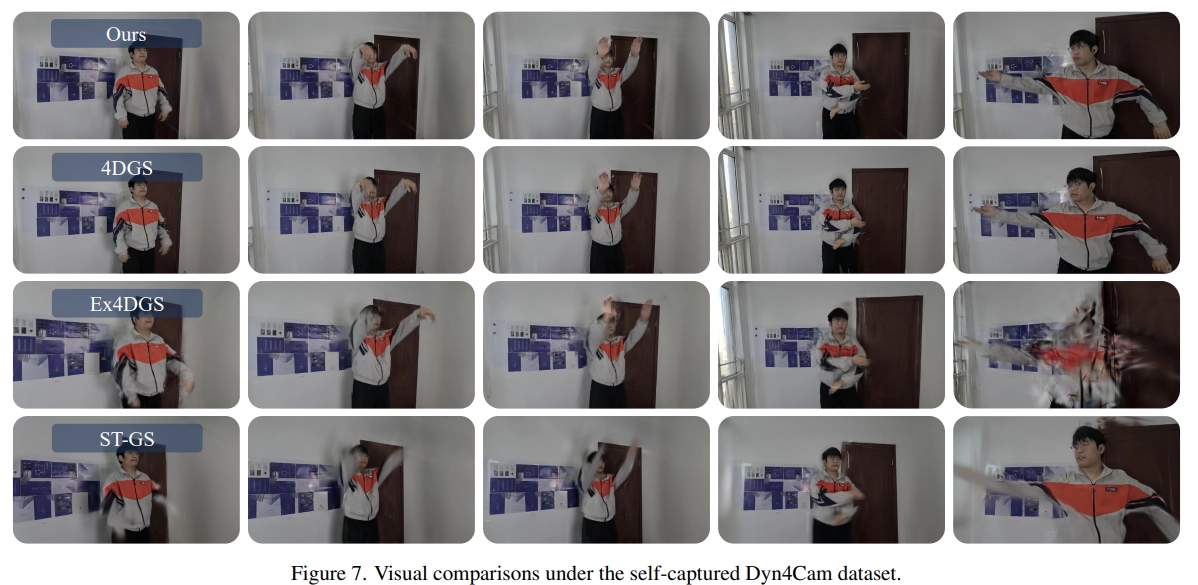
- 근데 생각보다 4DGS 기본 논문도 보기에는 잘하는것 같음. 근데 Geometry consistency는 확실히 4C4D가 나은듯

공부하고 싶은 사람