AI
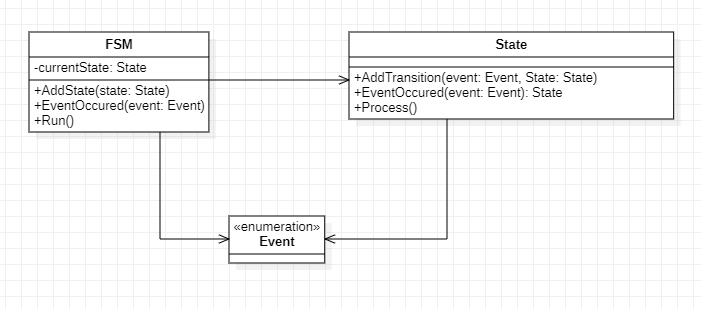
FSM
State에서 event가 발생하면 Transition State로 전이
A Star
갈 수 있는 영역과 갈 수 없는 영역을 미리 설정
Calculate(Node parent)
{
return parent.G + node.Cost(parent);
}
CompareCost(Node comparedNode)
{
// comparedNode를 통해 사용된 비용 보다 이전에 계산된 비용이 더 비싼 경우
int newCost = Calculate(comparedNode);
if(newCost < node.G)
{
node.parent = comparedNode;
node.G = newCost;
}
}
CalculateNodeCost(Node parent)
{
node.G = Calculate(parent);
node.H = HeuristicsCost;
node.F = G + H;
}
vector<Node> AStar()
{
OpenSet, CloseSet;
while(!openSet.empty())
{
Node* current = openSet.GetMinimumFCostNode();
if(current == destination)
{
break;
}
closeSet.insert(current);
for(auto linkedNode : linkedNodeListFromCurrentNode)
{
if(IsCollision(linkedNode))
{
continue;
}
else if(IsAlreadyIn(CloseSet, linkedNode))
{
continue;
}
else
{
if(IsAlreadyIn(OpenSet, linkedNode))
{
openSet.erase(linkedNode);
linkedNode.CompareCost(current);
}
else
{
linkedNode.CalculateCost(current);
}
openSet.insert(linkedNode);
}
}
}
stack<Node> reverse;
node = destination;
while(node->parent != null)
{
reverse.push(node);
node = node->parent;
}
vector<Node> ret;
while(!reverse.empty())
{
ret.push_back(reverse.top());
reverse.pop();
}
return ret;
}Reference : https://itmining.tistory.com/66

이상을 길잡이 삼아 로망을 추구합니다.