비선형 자료 구조란 일렬로 나열하지 않고 자료 순서나 관계가 복잡한 구조를 말하며 일반적으로 트리나 그래프를 말합니다.
그래프
그래프는 정점과 간선으로 이루어진 자료 구조를 말합니다.
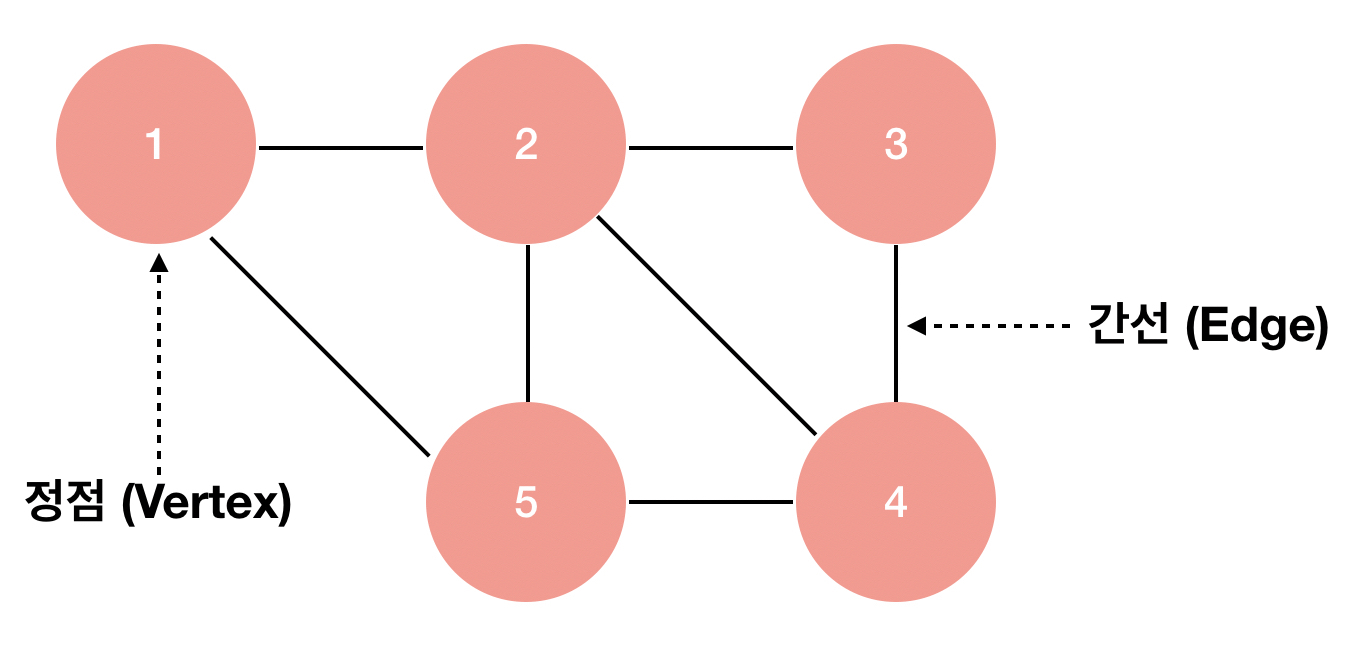
정점과 간선
가중치
가중치는 간선과 정점 사이에 드는 비용을 뜻합니다.
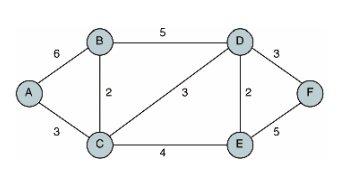
위 그림에서 노드 A에서 노드 B까지의 가중치는 6이 되겠죠?
트리
트리는 그래프 중 하나로 그래프처럼 정점과 간선으로 이루어져 있고, 트리 구조로 배열된 일종의 계층적 데이터의 집합입니다. 루트 노드, 내부 노드, 리프(단말) 노드 등으로 이루어지며 트리로 이루어진 집합은 숲이라고 합니다.
트리의 특징
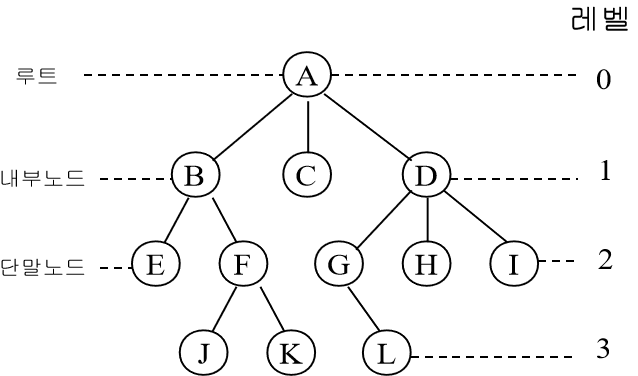
1. 부모, 자식 계층 구조를 가집니다. 노드 F는 노드 J와 K의 부모 노드이고 노드 J와 K는 노드 F의 자식 노드가 됩니다. 이처럼 같은 경로상에서 어떤 노드보다 위에 있느면 부모, 아래에 있으면 자식 노드가 됩니다.
2. 간선 수 = 노드 수 -1 라는 특징이 있습니다. V-1 = E
3. 트리 내의 어떤 노드와 어떤 노드까지의 경로는 반드시 있습니다.
트리의 구성
루트 노드
가장 위에 있는 노드를 뜻합니다. 보통 트리 탐색 문제에서 루트 노드를 중심으로 탐색하면 문제가 쉽게 풀리는 경우가 있습니다.
내부 노드
루트 노드와 리프 노드 사이에 있는 노드를 뜻합니다.
리프 노드
자식 노드가 없는 노드를 뜻합니다.
트리의 높이와 레벨
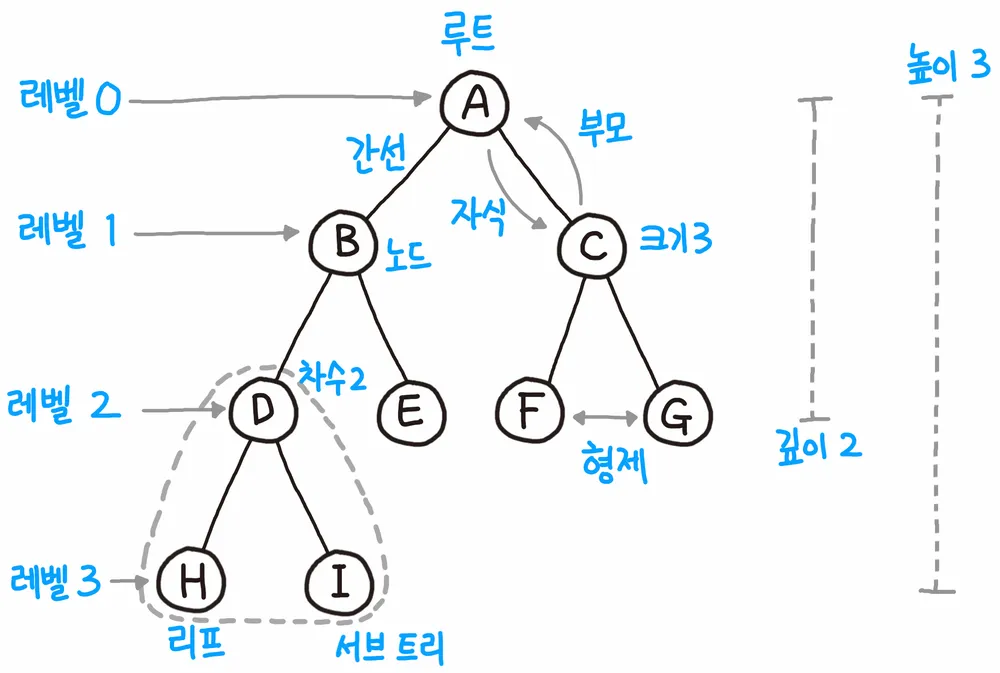
깊이 : 루트 노드부터 특정 노드까지 최단 거리로 갔을 때의 거리를 말합니다.
높이 : 루트 노드부터 리프 노드까지 거리 중 가장 긴 거리를 의미합니다.
레벨 : 보통 깊이와 같은 의미를 지닙니다.
서브트리 : 트리 내의 하위 집합을 말합니다. 부분 집합이라고도 할 수 있습니다.
이진 트리
자식의 노드 수가 두 개 이하인 트리를 의미합니다.
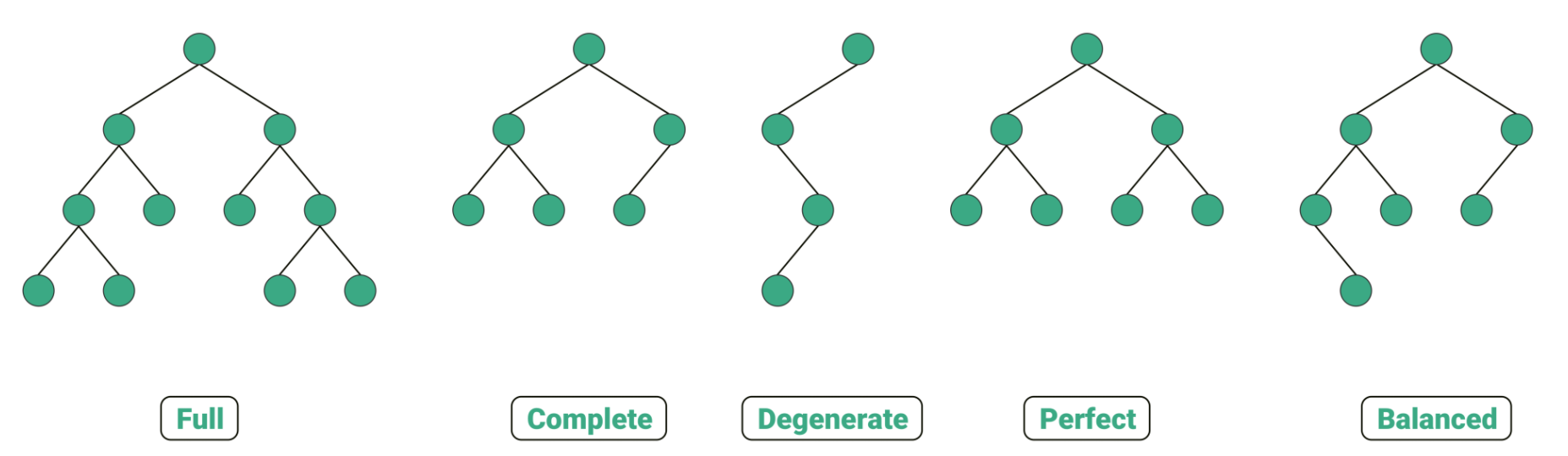
- 정이진 트리(full binary tree) : 자식 노드가 0 또는 두 개인 이진 트리
- 완전 이진 트리(complete binary tree) : 왼쪽에서부터 채워져있는 이진 트리. 마지막 레벨을 제외하고는 완전히 채워져있으며 마지막 레벨의 경우 왼쪽부터 채워져 있습니다.
- 변질 이진 트리(degenerate binary tree) : 자식 노드가 하나밖에 없는 이진 트리
- 포화 이진 트리(perfect binary tree) : 모든 노드가 꽉 차 있는 이진 트리
- 균형 이진 트리(balanced binary tree) : 왼쪽과 오른쪽 노드의 높이 차가 1 이하인 이진 트리
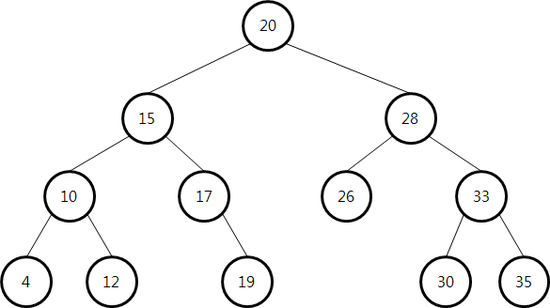
이진 탐색 트리(BST)
이진 탐색 트리(BST)는 노드의 오른쪽 하위 트리에는 '노드 값보다 큰 값'이 있는 노드만 포함되고, 왼쪽 하위 트리에는 '노드 값보다 작은 값'이 들어있는 트리를 말합니다.
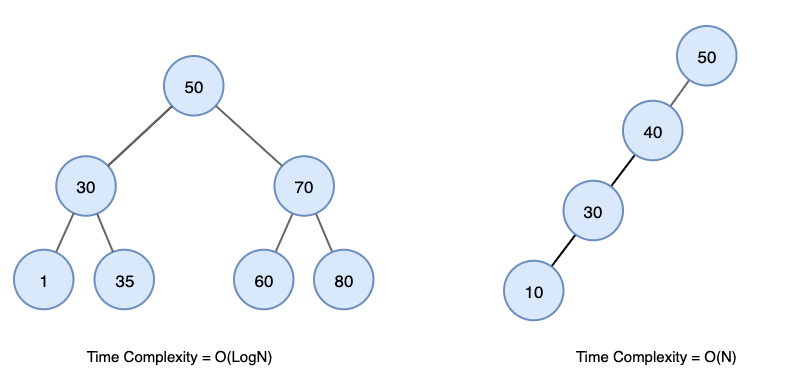
이런 특성은 '검색'을 하기에 용이합니다. 보통 요소를 찾을 때 이진 탐색 트리의 경우 O(logn)이 걸리지만 최악의 경우 O(n)이 걸립니다. 그 이유는 이진 탐색 트리는 삽입 순서에 따라 선형적일 수 있기 때문입니다.
AVL 트리
AVL 트리(Adelson-Velsky and Landis tree)는 앞서 설명한 최악의 경우 선형적인 트리가 되는 것을 방지하고 스스로 균형을 잡는 이진 탐색 트리입니다. 두 자식 서브트리의 높이는 항상 최대 1만큼 차이 난다는 특징이 있습니다.
탐색, 삽입 삭제 모두 시간 복잡도가 O(logn)이며 삽입 삭제를 할 때마다 균형이 안 맞는 것을 맞추기 위해 트리 일부를 왼쪽 혹은 오른쪽으로 회전시키며 균형을 잡습니다.
레드 블랙 트리
레드 블랙 트리는 균형 이진 탐색 트리로 탐색, 삽입, 삭제 모두 시간 복잡도가 O(logn)입니다. 각 노드는 빨간색 또는 검은색의 색상을 나타내는 추가 비트를 저장하며, 삽입 및 삭제 중에 트리가 균형을 유지하도록 하는 데 사용됩니다. C++ STL의 set, multiset, map, and multimap이 레드 블랙 트리를 이용하여 구현되어 있습니다.
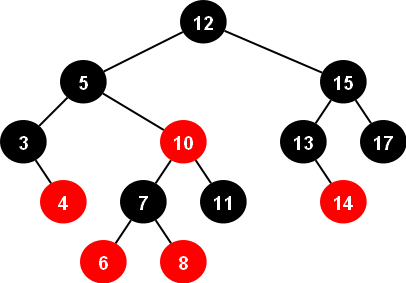
"모든 리프 노드와 루트 노드는 블랙이고 어떤 노드가 레드이면 그 노드의 자식은 반드시 블랙이다." 등의 규칙을 기반으로 균형을 잡는 트리입니다.
힙
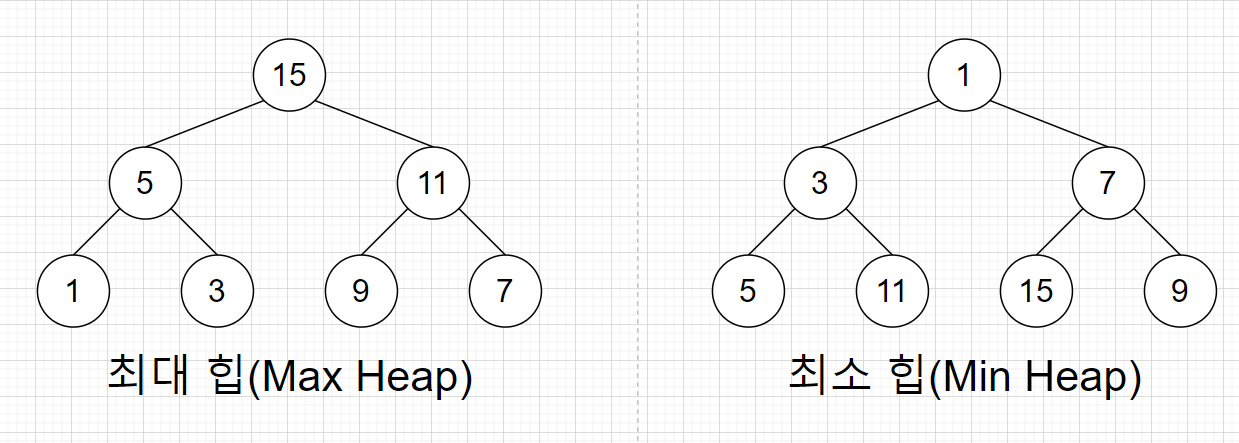
힙은 완전 이진 트리 기반의 자료 구조이며, 최소힙과 최대힙 두 가지가 있고 해당 힙에 따라 특정한 특징을 지킨 트리를 말합니다.
최대힙
루트 노드에 있는 키는 모든 자식에 있는 키 중에서 가장 커야 합니다. 또한, 각 노드의 자식 노드와의 관계도 이와 같은 특징이 재귀적으로 이루어져야 합니다.
최소힙
최소힙에서 루트 노드에 있는 키는 모든 자식에 있는 키 중에서 최솟값이어야 합니다. 또한, 각 노드의 자식 노드와의 관계도 이와 같은 특징이 재귀적으로 이루어져야 합니다.
힙에는 어떠한 값이 들어와도 특정 힙의 규칙을 지키게 만들어져 있습니다.
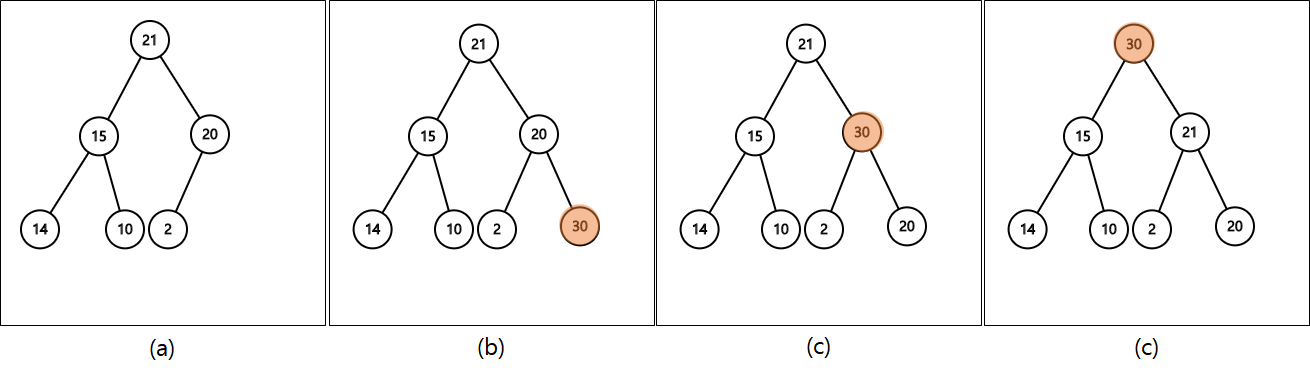
최대힙의 삽입
힙에 새로운 요소가 들어오면, 일단 새로운 노드를 힙의 마지막 노드에 이어서 삽입합니다. 이 새로운 노드를 부모 노드들과의 크기를 비교하며 교환합니다.
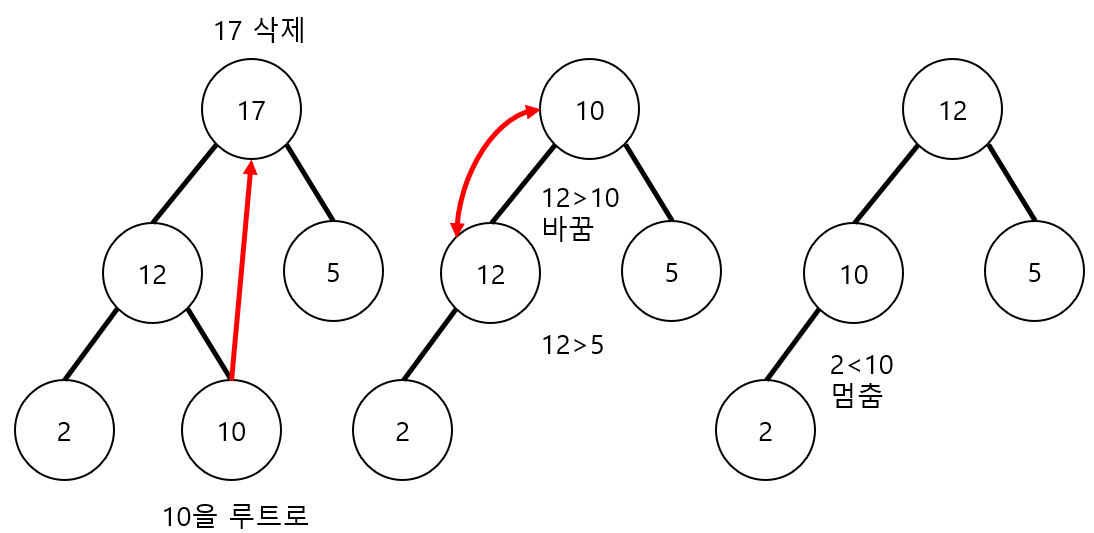
최대힙의 삭제
최대힙에서 최댓값은 루트 노드이므로 루트 노드가 삭제되고, 이 이후 마지막 노드와 루트 노드를 스왑하여 또다시 스왑 등의 과정을 거쳐 재구성 됩니다.
우선순위 큐
우선순위 큐는 우선순위 대기열이라고도 하며, 대기열에서 우선순위가 높은 요소가 우선 순위가 낮은 요소보다 먼저 제공되는 자료 구조입니다.
우선순위 큐는 힙을 기반으로 구현됩니다.
아래 코드처럼 greater로 오름차순, less로 내림차순으로 나타낼 수 있고 int 외에 다른 자료 구조를 넣어서 할 수 있습니다.
#include <bits/stdc++.h>
using namespace std;
priority_queue<int, vector<int>, greater<int> > pq; //오름차순
//priority_queue<int, vector<int>, less<int> > pq; // 내림차순
int main(){
pq.push(5);
pq.push(4);
pq.push(3);
pq.push(2);
pq.push(1);
cout << pq.top() << "\n";
return 0;
}
/*
1
*/오름차순으로 정렬하게 해서 내림차순으로 입력되었음에도 우선순위가 높은 1이 출력되는 것을 볼 수 있습니다.
맵(map)
맵(map)은 특정 순서에 따라 키와 매핑된 값의 조합으로 형성된 자료 구조입니다. 레드 블랙 트리 자료 구조를 기반으로 형성되고, 삽입하면 자동으로 정렬됩니다.
맵을 쓸 때는 map<string, int> 형태로 구현합니다.
참고로 map은 해시 테이블을 구현할 때 쓰며 정렬을 보장하지 않는 unordered_map과 정렬을 보장하는 map 두 가지가 있습니다.
map을 순회할 때는 키에 해당하는 값(key)을 first, 키에 매핑된 값(value)에 해당하는 값을 second로 탐색 가능합니다.
#include <bits/stdc++.h>
using namespace std;
int main(){
map<string, int> _map;
_map["큰돌"]++;
_map["큰돌"]++;
for(auto c : _map){
cout << c.first << " : " << c.second <<"\n";
}
return 0;
}
/*
큰돌 : 2
*/셋(set)
셋(set)은 특정 순서에 따라 고유한 요소를 저장하는 컨테이너이며, 중복되는 요소는 없고 오로지 희소한(unique) 값만 저장하는 자료 구조입니다.
해시 테이블
해시 테이블은 무한에 가까운 데이터들을 유한한 개수의 해시 값으로 매핑한 테이블입니다. (key, value)로 데이터를 저장하며 빠르게 데이터를 검색할 수 있는 자료 구조입니다.
삽입, 삭제, 탐색 시 평균적으로 O(1)의 시간 복잡도를 가지며 unordered_map으로 구현합니다.
