ROS
ROS
ROS는 로봇 응용프로그램을 개발할 때 필요한 하드웨어 추상화, 하위 디바이스 제어, 센싱, 인식, 슬램, 네비게이션 등의 기능 구현 및 메시지 전달, 패키지 관리, 개발 환경에 필요한 라이브러리와 다양한 개발 및 디버깅 도구를 제공하는 오픈 소스 기반의 로봇 메타 OS이다.
특히 메타 OS라고 하는 것은 일반적인 OS인 윈도우, 리눅스, 맥 OS위에서 동작하는 프레임워크이다.
모든 소스는 BSD 라이센스(Berkeley Software Distribution License)로 해당 저작권자의 이름을 같이 배포하면, 수정/배포에 제약을 받지 않는다.
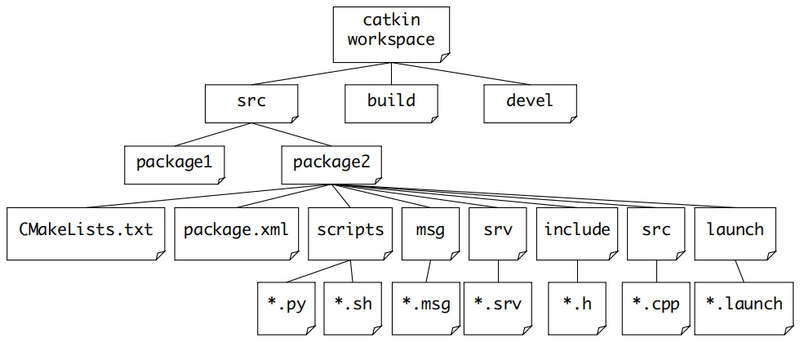
ROS package layout
ROS 특징
ROS의 특징은 노드간의 데이터통신 인터페이스를 정의하여 지원하고, 로봇의 하드웨어를 표현할 수 있는 XML 기술 문서를 정의하고, 다양한 센서 라이브러리를 제공한다. 또한 슬램 및 네비게이션 라이브러리와 매니퓰레이션을 위한 GUI 툴을 제공하고 있으며, 로봇 개발시에 꼭 필요한 시각화 도구 및 그래픽 인터페이스와 3차원 시뮬레이터를 제공하고 있다.
Install ROS
Ubuntu 18.04.6 LTS (Bionic Beaver), Melodic ROS
wget https://raw.githubusercontent.com/orocapangyo/meetup/master/190830/install_ros_melodic.sh && chmod 755 ./install_ros_melodic.sh && bash ./install_ros_melodic.sh
catkin 환경에서 workspace 생성

데이터 엔지니어 ing