
Three steps
- Feature Detection
- Feature Description
- Feature Matching
ORB
- Oriented FAST and Rotated BRIEF
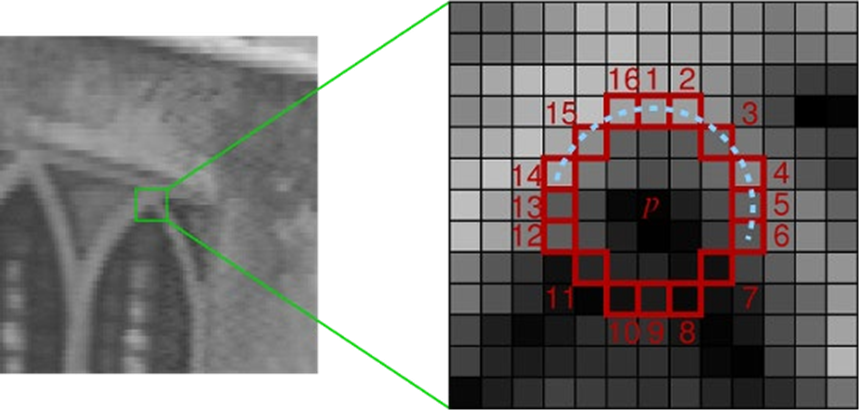
FAST keypoint detector
- Features from Accelerated Segment Test
- Center pixel p를 기준으로 n개 연속한 픽셀들이 p보다 밝으면? -> p는 key다.
BRIEF descriptor
- BRIEF provides a method to compute the binary strings.
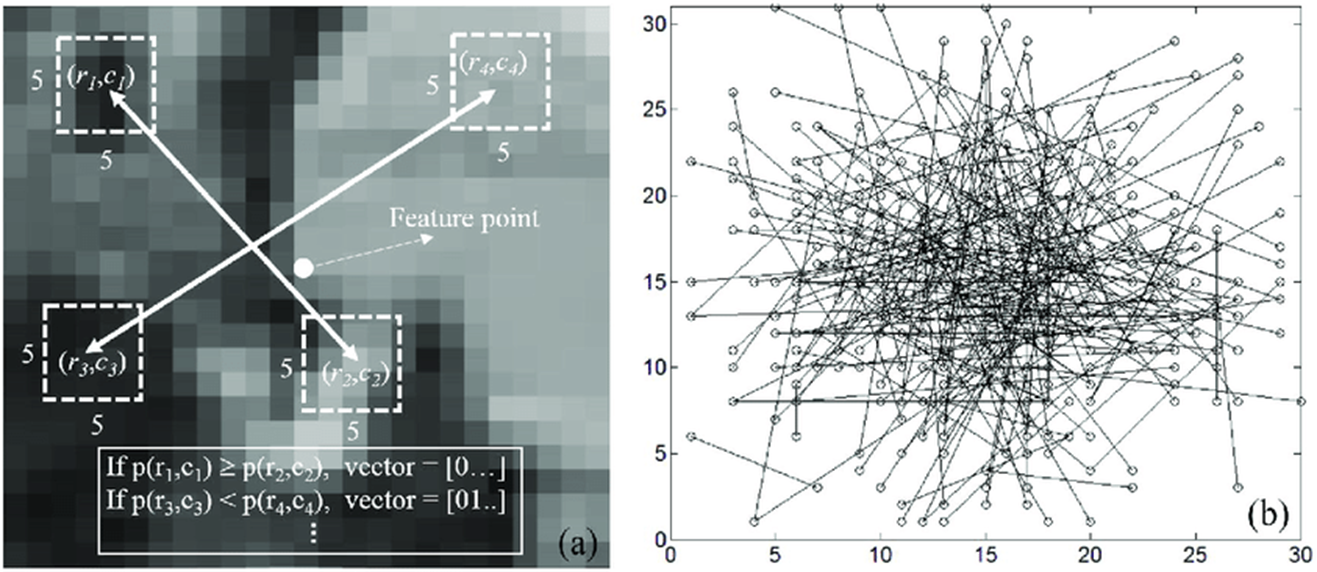
- Key points를 찾으면, 수치화해야 한다. Description -> binary
- 각 pair 영역이 얼마나 차이 나는지 비교
- 오른쪽 이미지: 256개의 다른 패턴을 조사함
- 256 pixel이면, 256 bits만 있으면 된다.
- 방향이 바뀌면 성능이 떨어진다는 문제
Rotated BRIEF
- 각도를 12도로 고정한 상태로 모든 BRIEF 패턴을 계산해 속도를 향상
- 회전 전 vs 회전 후 pixel pair를 비교하여 binary string 생성
Local Feature Matching
- 여러 개의 features가 추출됨 -> 이제 매칭한다.
Nearest neighbor
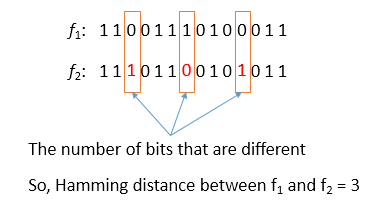
NNDR - matching strategy
- Nearest Neighbor Distance Ratio
- Outlier를 무시하자

Übermensch