도면 벽 검출
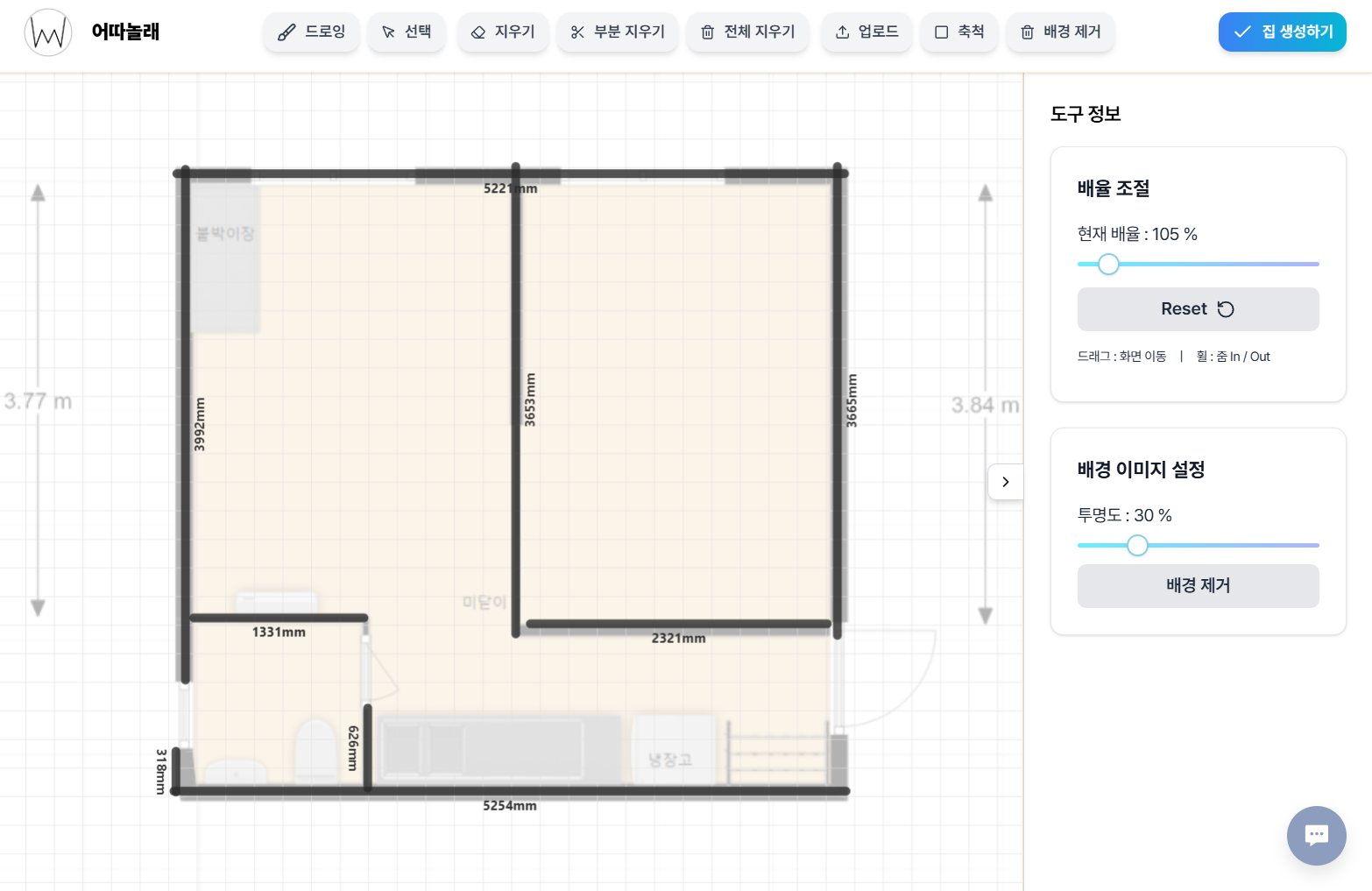
<어따놀래>는 사용자가 도면의 사진을 업로드하면 벽을 검출하여 표시하는 기능을 제공합니다.
단 본 프로젝트의 지향점이 AI의 성능 강화보단 전반적인 웹 서비스 구현에 초점을 맞추었기 때문에, 벽 검출 기능에 일부 오차가 있을 수 있습니다.
물론 직접 인공지능 모형을 훈련하거나 하는 식으로 해결할 순 있겠지만, 도면만들기보단 시뮬레이터에 집중해야 할 필요가 있겠다고 생각했습니다. (특히 정글이 AI 부트캠프는 아닌만큼, 선택과 집중을...)
대신 축척 설정 및 벽 추가 / 삭제 등 에디터 기능 역시 구현되어 있으므로, 벽 검출에 오차가 있더라도 사용자가 바로 수정할 수 있습니다.
Hough Transformation
벽 검출에는 공개 컴퓨터 비전 라이브러리인 OpenCV.js의 Hough Transformation을 사용하였습니다.
Hough Transformation은 도형 및 사진에서 선을 검출해 주는 알고리즘입니다. 동작 과정을 차례로 설명해 보겠습니다.
0. 원본 이미지
1. 그레이스케일 변환
window.cv.cvtColor(srcImg, gray, window.cv.COLOR_RGBA2GRAY);- 벽 검출에 불필요한 색상 정보를 없애고 그레이스케일로 변환합니다.
2. 이진화
window.cv.threshold(gray,
binary,
0,
255,
window.cv.THRESH_BINARY_INV + window.cv.THRESH_OTSU
);- 실제로는 흑백 이미지도 0부터 255까지의 밝기를 가집니다. Otsu 이진화는 그레이스케일 이미지를 완전한 검은색(0) 또는 흰색(255)로 변환하는 과정입니다.
- 0부터 255까지 모든 밝기 값의 빈도를 구한 뒤, 빈도의 분산이 최대가 되는 임계값을 구합니다.
- 분산은 '어두운 그룹과 밝은 그룹의 평균 밝기 차이가 가장 커지도록 이미지를 둘로 나누는 기준 값'을 말합니다.
- 이후 임계값보다 어두우면 흰색(0, 벽을 나타냄), 밝으면 검은색(255, 벽이 아닌 곳을 나타냄)으로 처리됩니다.
3. 모폴로지 연산 (노이즈 계산)
const kernel = window.cv.Mat.ones(3, 3, window.cv.CV_8U);
window.cv.morphologyEx(binary, cleaned, window.cv.MORPH_OPEN, kernel);- 모폴로지 연산은 이미지의 점들을 조금씩 늘리거나 줄여서, 작은 얼룩을 없앨 수 있습니다.
- 선 내 작은 구멍을 메우고 연결해 주는 역할을 수행합니다.
- 3 x 3 행렬로 주변 9개 점들을 한 번에 보면서 작은 점들을 지우고, 끊어진 선들을 이어줍니다.
4. Canny 엣지 검출을 통한 윤곽선 계산
window.cv.Canny(cleaned, edges, canny1, canny2, 3, false);- Canny 엣지검출은 이미지에서 가장자리, 즉 윤곽선을 검출하는 알고리즘입니다.
- Canny 임계값은 벽과 배경 사이 밝기 차이를 측정합니다.
canny1(50)보다 낮으면 경계선이 아니라고 판단하고,canny2(150)보다 높으면 확실한 경계선으로 판단합니다. 50과 150 사이의 값은 주변에 확실한 경계선이 있을 때만 경계선으로 인정합니다.
5. Probabilistic Hough를 통한 벽 선분 추출
window.cv.HoughLinesP(
edges,
lines,
1, // rho: 거리 해상도
Math.PI / 180, // theta: 각도 해상도 (1도)
houghTh, // 임계값 (80)
minLen, // 최소 선분 길이 (30)
maxGap // 선분 간 최대 간격 (20)
);- Hough Transform을 통해 흩어진 점을을 이어 선분을 검출할 수 있습니다.
rho는 선의 위치를 1픽셀 단위로,theta는 선의 기울기를 1도 단위로 세밀하게 측정하여 정확한 직선을 찾아냅니다.houghTh(80)는 몇 개의 점이 일직선 위에 있어야 선으로 인정할지 정하는 값입니다. 80개 이상의 점이 일직선상에 있으면 벽으로 판단합니다.
6. 선분 필터링
filterLines(lines, minLength = 80, angleThreshold = 5)- 실제 벽으로 보기 어려운 선분을 제거합니다.
- 너무 짧은 선분(80px 미만)이나, 수직/수평이 아닌 선분 (회전각도가 5도 이상)인 경우 제거됩니다.
7. 평행선 병합
mergeParallelLines(lines, maxDistance = 15, angleThreshold = 5)- 지금까지의 과정에서는 한 벽에서 여러 개의 선이 검출될 수 있습니다. 따라서 평행한 선을 하나의 선으로 병합할 필요가 있습니다.
- 위 사진의 분홍색 선은, 원래 선들 중 병합된 선을 의미합니다.
angleThreshold: 5도 이내의 각도 차이만 평행선으로 인정합니다.maxDistance: 15px 이내 거리의 선만 병합 대상입니다.- 겹침 구간이 10% 이상인 선분만 병합하여, 정확도를 높입니다.

뭔가 만드는 걸 좋아하는 개발자 지망생입니다. 프로야구단 LG 트윈스를 응원하고 있습니다.