Sharing of global resources can create
- Need for mutual exclusion (mutex)
- Deadlock
- Starvation
Sharing of global data may lead to race condition.
race condition
This occurs when two or more process/threads access shared data and they try to change it at the same time. Because thread/process scheduling algorithm can switch between threads, you don't know which thread will access the shared data first. In this situation, both threads are 'racing' to access/change the data.
Operations upon shared data are critical sections that must be mutually exclusive in order to avoid harmful collision between processes or threads.
critical section
A section of code within a process that requires access to shared resources and that must not be executed while another process is in a corresponding section of code
atomic operation
✔️ critical section, semaphore 등을 구현하기 위해 모든 CPU가 atomic 연산을 제공한다.
✔️ "Atomic" means
- Indivible, uninterruptable
- Must be performed atomically, which means either "success" or "failure"
- Success : successfully change the system state
- Failure : no effect on the system state
✔️ Atomic operation
- A fuction or action implemented as a single instruction or as a sequence of instructions that appears to be indivisible
- No other processes can see an intermediate state
- Can be implemented by HW or SW
- HW-level atomic operations
- Test-and-set, fetch-and-add, compare-and-swap, load-link, store-conditional
- SW-level solutions
- Running a group of instructions in a critical section
💡 atomic instruction 을 사용하여 lock 변수를 구현하면 process, processor 수에 상관없이 공유자원을 사용할 수 있다. 직관적이고 여러 개의 critical section 을 구현할 수 있다.
그러나 Busy-waiting 해서 비효율적이고, 스케줄링에 의해 Starvation, Deadlock 이 가능하다 라는 단점이 있기에 좀 더 논리적인 mutual exclusive 에 대한 이상적인 SW적 해결방안이 필요했다. 그래서 등장하는 것이semaphore이다.
semaphore 🔒
세마포어라는 자료구조가 있다면 우리가 원하는 mutual exclusive critical section 을 구현할 수 있지 않을까 라는 기대!
✔️ A variable that provides a simple abstraction for controlling access to a common resource in a programming environment
✔️ The value if the semaphore variable can be changed by only 2 operations
- V operation (also known as "signal")
- Increment the semaphore
- P operation (also known as "wait")
- Decrement the semaphore
- The value of the semaphore S is usually the number of units of the resource that are currently available.
✔️ Type of semaphores
- Binary semaphore
- 0 (locked, unavailable)
- 1 (unlocked, available)
- Counting semaphore
- Can have an arbitrary resource count
✔️ Definition of Counting semaphore
struct semaphore
{
int count;
queueType queue;
};
void semWait(semaphore s) // P
{
s.count--;
if(s.count<0)
{
/*place this process in s.queue */
/*block this queue*/
}
}
void semSignal(semaphore s) // V
{
s.count++;
if(s.count <=0)
{
/*remove a process P from s.queue */
/*place process P on ready list*/
}
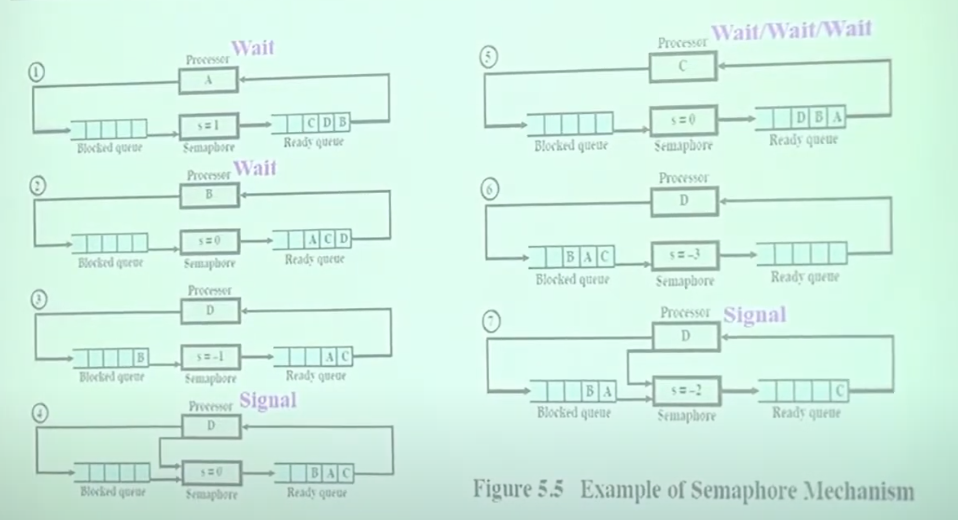
}example
Example of Semaphore Mechanism
Mutual Exclusion (critical section) Using Semaphores
const int n = number_of_processes;
semaphore s = 1;
void P(int i)
{
while(true)
{
semWait(s); // P
/*critical section*/
semSignal(s); // V
/*remainder*/
}
}
void main()
{
parbegin( P(1), P(2), ..., P(N) );
}Message Passing
When processes interact with one another, the following actions must be satisfied by the system
- Mutual exclusion
- Sychronization
- Communication
Blocking/Nonblocking Send/Receive
✔️ Blocking send, blocking receive
- Both sender and receiver are blocked until the message is delivered
- Sometimes referred to as a rendezvous
✔️ Nonblocking send, blocking receive
- The moust useful combination
✔️ Nonblocking send, nonblocking receive
- Neither party is required to wait
Addressing
Direct addressing
Indirect addressing
Synchronization
✔️ Communication of a message between two processes implies synchronization between the two
- The receiver cannot receive a message until it has been sent by another process
✔️ Both sender and receiver can be blocking or nonblocking
- when a send primitive is executed, there are two possibilities
- Either the sending process is blocked until the message is received, or it is not
- When a receive primitive is executed there are also two possibilities
🔗 Reference
[KUOCW] 최린 교수님의 운영체제 강의를 수강하고 정리한 내용입니다. 잘못된 내용이 있다면 댓글로 알려주시면 감사하겠습니다 😊
