[프로그래머스] 단속카메라
-
https://school.programmers.co.kr/learn/courses/30/lessons/42884
-
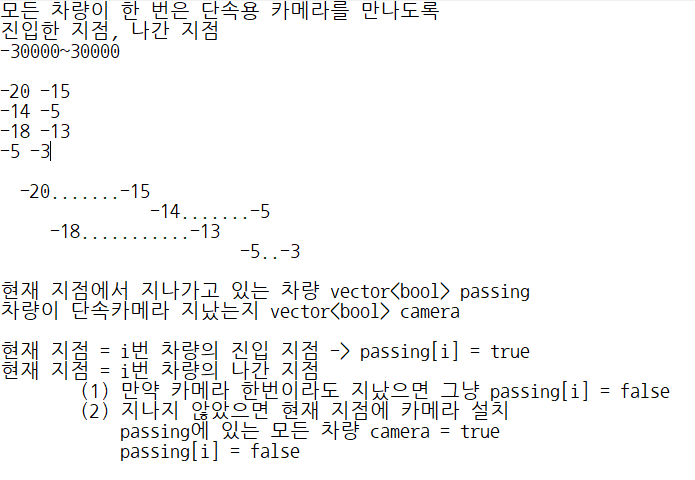
문제 접근 방법 (그리디 알고리즘)
틀린 풀이
-
시간 초과
-
채점 결과
정확성: 50.0
효율성: 0.0
합계: 50.0 / 100.0
#include <string>
#include <vector>
#include <algorithm>
using namespace std;
int solution(vector<vector<int>> routes) {
vector<bool> passing(routes.size(), false);
vector<bool> camera(routes.size(), false);
int answer = 0;
int pos = -30000;
while(pos <= 30000){
//현재 지점이 진입 지점인 차량 확인
for(int i = 0;i<routes.size(); ++i){
//i번 차량이 진입한 지점인 경우
if(pos == routes[i][0]){
passing[i] = true;
}
}
//현재 지점이 진입 지점인 차량 확인
for(int i = 0;i<routes.size(); ++i){
//i번 차량이 나간 지점인 경우
if(pos == routes[i][1]){
//이미 단속 카메라 한번 만났을 경우
if(camera[i]){
//빠져나오기
passing[i] = false;
}
//만나지 않은 경우 현재 지점에 카메라 설치
else{
answer++;
//현재 지점을 지나가고 있는 모든 차량 camera = true
for(int j = 0; j<routes.size(); ++j){
if(passing[j]) camera[j] = true;
}
//빠져나오기
passing[i] = false;
}
}
}
pos++;
}
return answer;
}풀이
- -30000~30000 사이 모든 지점을 while문으로 돌지 않도록 코드 수정
#include <string>
#include <vector>
#include <algorithm>
#include <iostream>
using namespace std;
int solution(vector<vector<int>> routes) {
//시작 지점, 차량 번호
vector<pair<int, int>> roadIn;
//나간 지점, 차량 번호
vector<pair<int, int>> roadOut;
for(int i = 0; i < routes.size(); ++i){
roadIn.push_back({routes[i][0], i});
roadOut.push_back({routes[i][1], i});
}
//시작 지점, 나간 지점 오름차순 정렬
sort(roadIn.begin(), roadIn.end());
sort(roadOut.begin(), roadOut.end());
vector<bool> passing(routes.size(), false);
vector<bool> camera(routes.size(), false);
int answer = 0;
int inIdx = 0; //roadIn 인덱스
int outIdx = 0; //roadOut 인덱스
while(outIdx < routes.size()){
int outPos = roadOut[outIdx].first;
//현재 지점이 진입 지점인 차량 확인
if(inIdx < routes.size()){
int inPos = roadIn[inIdx].first;
if(inPos <= outPos){
passing[roadIn[inIdx].second] = true;
inIdx++;
continue;
}
}
//현재 지점이 진입 지점인 차량 확인
//이미 단속 카메라 한번 만났을 경우
if(camera[roadOut[outIdx].second]){
//빠져나오기
passing[roadOut[outIdx].second] = false;
}
//만나지 않은 경우 현재 지점에 카메라 설치
else{
answer++;
//현재 지점을 지나가고 있는 모든 차량 camera = true
for(int j = 0; j<routes.size(); ++j){
if(passing[j]) camera[j] = true;
}
//빠져나오기
passing[roadOut[outIdx].second] = false;
}
outIdx++;
}
return answer;
}
Be able to be vulnerable, in search of truth