- 05.11
- gantry_sync_220511 브랜치 생성
- 05.13
- 동기 구동용 스레드 함수 생성
- 05.31
- 기존 스레드 로직 정리
- 주석 추가
- 기존 스레드 로직 정리
- 06.13
- 동기 구동 활성화 함수 및 확인 함수 뼈대 잡기
EnableGantrySyncIsGantrySync
- 동기 구동 설정 함수 뼈대 잡기
SetGantrySyncHoming
- 동기 구동 스레드 내부 로직 갱신
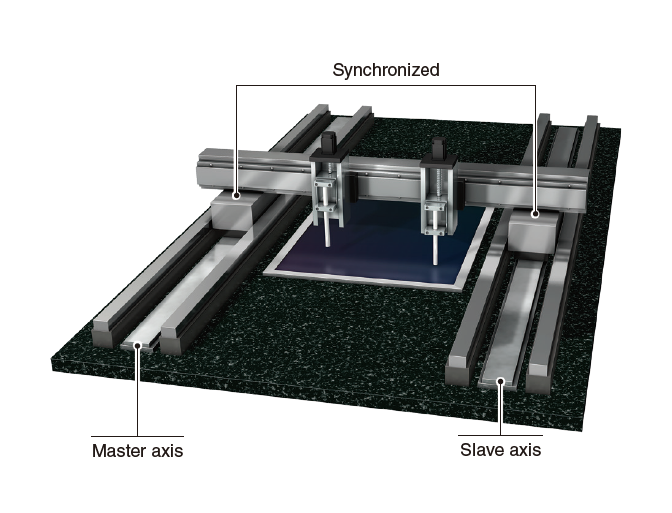
- master 축과 slave 축 중 활성화 된 축에 따라 다르게 동작하도록 조건문 설정
- 동기 구동 활성화 함수 및 확인 함수 뼈대 잡기
- 06.14
- 기존 코드 리팩토링
- 스레드 함수 내에서 멤버변수 등을 사용하기 위해서는 객체에 대한 포인터로 접근해야 함
- MFC 방식의 함수 포인터 제거
- 람다 캡쳐(
[=]) 활용 - 람다는 호출되는 스코프 범위에서 존재하는 변수들을 캡쳐할 수 있다
[=]: 스코프 내의 모든 변수 값 복사, 멤버 함수에서 람다 호출 시, this 포인터 함께 전달
- 기존 코드 리팩토링
- 06.15
- 기존 코드 리팩토링
- 재사용을 위한 함수화 진행
- 반복되는 코드를 부분으로 나누어 함수 생성
InitOrgPreConfigResetOrgPreConfigMoveOrgOffset
- 기존 코드 리팩토링
- 06.27
- 사용자 api 임시 적용
- 기존 코드 로직 정리
- 기존 코드 로직 정리
- 내부 api 임시 적용
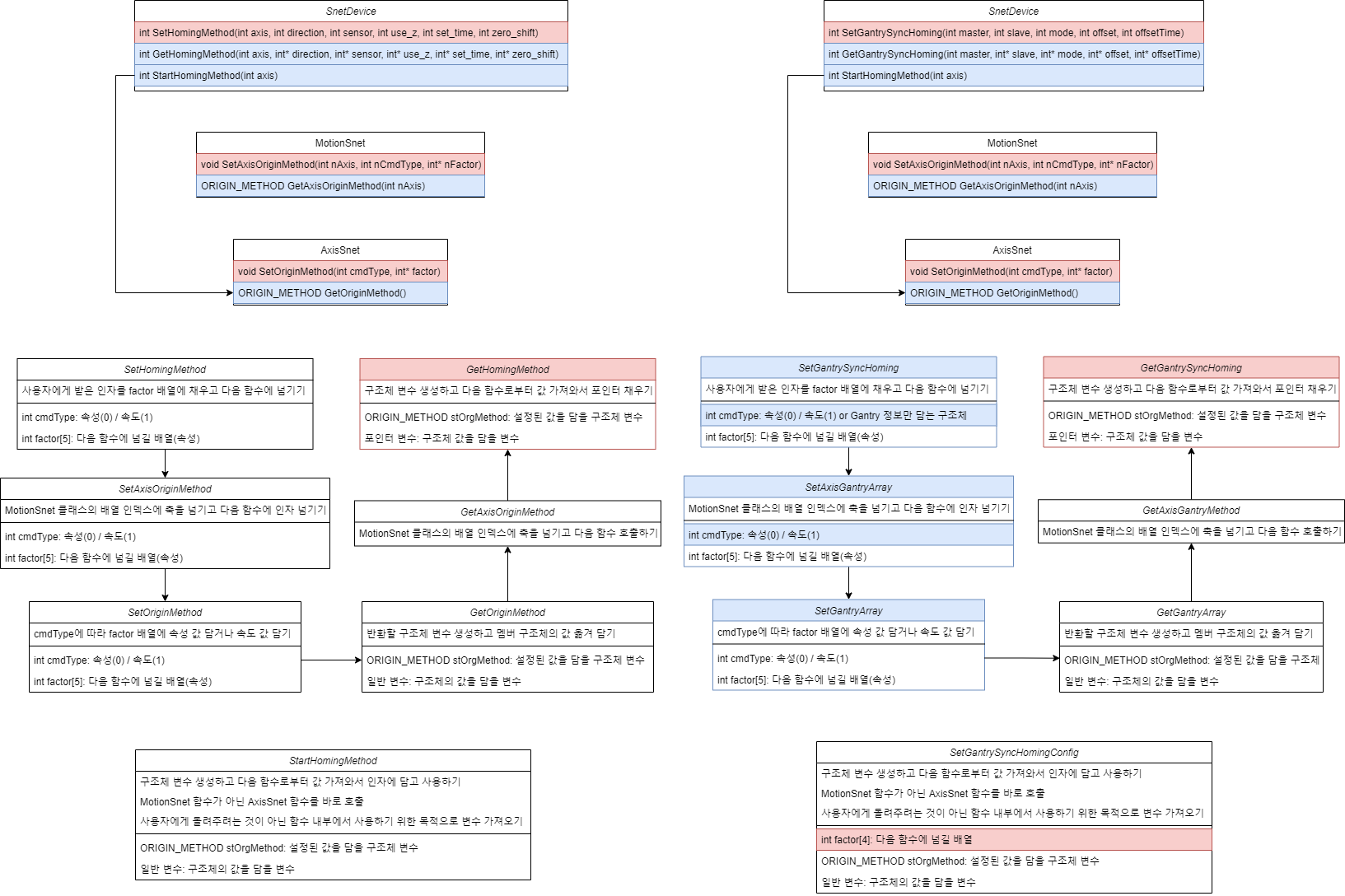
- 사용자 인자를 내부 자료 구조에 저장하는 함수 정리
- ex:)
SetAxisGantryArray,GetAxisGantryArray
- homing 설정 함수 및 확인 함수 생성
SetGantrySyncHomingConfigGetGantrySyncHomingConfig
- 헤더 파일 갱신
- Gantry 전용 자료 구조(struct) 생성
SetGantrySyncHoming함수 기존 코드와 유사한 형태로 갱신
- 사용자 api 임시 적용
- 06.28
- 기능에 맞춰 새로운 함수의 매개변수 재정의
- Gantry 활성화 함수를 제외한 나머지 새로운 함수들을 기존 코드와 유사한 형태로 갱신
- Gantry 활성화 함수는 제어기와 통신하므로 따로 진행
- 07.04
- 동기 구동 활성화 함수를 위한 브랜치 생성
- 업체 요청에 따라 동기 구동 활성화 함수 우선 적용
- 동기 구동 활성화 함수 추가
EnableGantrySyncIsGantrySync
- 토큰 및 common_id 추가
- 헤더, api, 마셜링 코드(
CS) 추가
- 동기 구동 활성화 함수를 위한 브랜치 생성
- 07.05
- 기존 homing 함수를 이용해서 homing 인자 설정하기로 결정
SetGantrySyncHomingConfig함수 제거SetGantrySyncHoming함수에서 gantry 관련 설정할 것
rxBuf값 변경- token 제외
- 인덱스 하나씩 당김
- GantrySync error code 추가
- 동기 구동 활성화 테스트 완료
- 정상 구동 확인
- 기존 homing 함수를 이용해서 homing 인자 설정하기로 결정
- 07.08
SetGantrySyncHoming,GetGantrySyncHoming검증 완료- 사용자 API에 등록
- GantrySync Test Program 제작
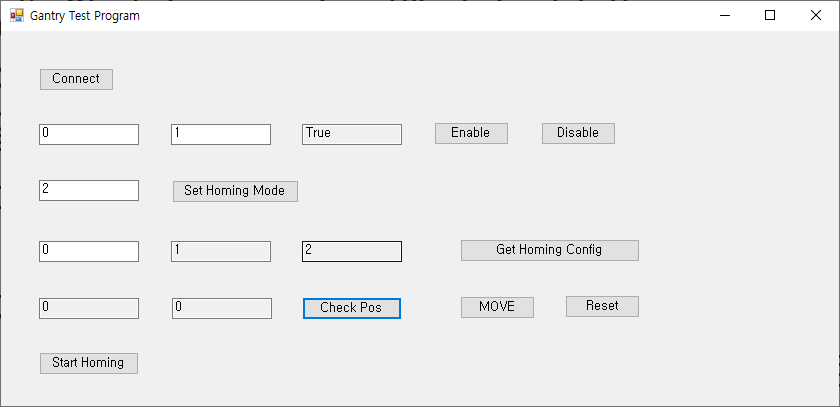
Enable/DisableEnableGantrySync파라미터에 따라 동기 구동 활성/비활성- timer를 통해 실시간으로 활성/비활성 여부 확인 가능
Set Homing ModeSetGantrySyncHoming함수와 연동
Get Homing ConfigGetGantrySyncHoming함수와 연동- master 값은 사용자가 입력
- slave와 mode 값을 불러온다
Move- 동기가 잘 되었는지 확인할 수 있는 기능
- master 축과 slave 축의 동기 이송 확인 가능
Reset- Position 0으로 이송하기
- 동기가 걸려있으면 master 설정만으로 slave도 함께 이동한다
Check PosGetCommandPosition함수와 연동- 현재 위치를 확인할 수 있다
Start HomingStartHomingMethod함수와 연동- 동기가 걸려 있으면
GantrySyncHoming을 진행한다 - 동기가 걸려 있지 않으면 단축 homing(
mode 0)을 진행한다
- 07.12
ThrGan함수 추가- 기존 함수들을 최대한 재사용하고 GantrySync 로직에 맞는 동작 추가
- slave 축에 대한 step을 thread 내부에서 정의
- 함수화 완료
- 기존
ThrOrg함수의 코드를 재활용 - 기존 homing 로직에서 벗어나 GantrySync 로직에 맞게 역할을 분리하여 함수화 진행
InitOrgPreConfigResetOrgPreConfigRunOrgStepMoveOrgOffset
- 기존
SetGantrySyncHoming함수에서offset,setTime파라미터 삭제- API에서 구한 offset을 내부적으로 처리함으로써 사용자가 offset을 알 필요 없다고 판단
- GantrySync 관련 struct에 offset을 저장했다가 내부적으로 활용
- mode에 따른 분기
- mode가 0일 때는
StartOrgThread함수에서ThrOrg분기를 탄다 - 나머지 값일 때는
ThrGan분기를 탄다 - 이로써 mode에 따라 단축과 다축 homing을 나눌 수 있다
- mode가 0일 때는
- 07.13
offset파라미터 부활- 회의 결과, offset은 사용자가 직접 넣어야 하는 값으로 판단
- 따라서,
SetGantrySyncHoming함수의 인자로 다시 채택 setTime(homing에 필요)의 경우, 상대 이송 함수를 사용함에 따라 필요 없게 되어 제거
SetGantrySyncHoming함수 분리mode라는 파라미터가 동작 원리를 헷갈리게 한다는 의견 수렴- mode 1과 2은 마지막 보정 이송 절차의 유무 외에는 동일한 sequence를 가짐
- 따라서, 두 mode를 함수로 분리하기로 결정
- 다만, mode 0(단축)과 1(다축)은 구분해야 하므로 mode 파라미터는 계속 유지
- mode 2를 설정하는
CheckGantrySyncHomeSensOffset함수 - 위 함수로 구한 home sensor offset을 가져오는
GetGantrySyncHomeSensOffset함수
- 해야할 일
- home 센서 달린 기계에서 테스트
- 로그 파일 생성 후, 위치 기록하기
- master 기준으로 동기 구동 중, slave에 servo off 걸릴 시 대처 방법 찾기
- SetCommandPosition (+ zeroShift) 함수 동기 안 되는 문제
- home 센서 달린 기계에서 테스트
- 07.14
- mode를 함수로 분리하자는 의견이 비합리적이라는 판단에 따라 다음과 같은 변경 사항 적용
- 파라미터 변경
SetGantrySyncHoming과GetGantrySyncHomingmode가 아닌dualUse와compensationUsedualUse: 단축(기존 mode 0) / 두 축(기존 mode 1)compensationUse: 보정 이송 유무(유: 기존 mode 2, 무: 기존 mode 1)
CheckGantrySyncHomeSensOffset함수 제거GetGantrySyncHomeSensOffset은 이름만 변경하고 유지- mode에 상관 없이 사용자가 homeOffset을 알 수 있도록 하기 위해 필요한 함수
- 07.15
- log 파일 작업 중
- GantrySync 동작 확인을 위한 log 파일
SetUserLogSection의 인자에 따라 내부 동작 확인용 로그 기록- GantrySync Test Program에 관련 기능 추가
- master homing 끝나고 slave homing 시작 시, 0으로 초기화하지 않는 문제 발견
로그 유형을 GantrySync에서 Origin으로 바꾸면서 생기는 문제??기존 로그 파일 제거 후 구동 시, 정상 동작 >> 로그 파일 문제
- log 파일 작업 중
- 07.18
- GantrySync 구동 시, Z상 적용 안 되는 문제 해결
- 함수화 진행하면서 파라미터 값을 고정해서 생긴 문제
- Z상 사용 여부를 결정하는
useZ파라미터를 따로 받도록 수정
- master homing 끝나고 slave homing 시작 시, 0으로 초기화하지 않는 문제 해결
- 로그 파일의 문제X
SetCommandPosition사이에 Sleep 코드 추가
- GantrySync 구동 시, Z상 적용 안 되는 문제 해결
- 07.19
- 동기 비활성화 후, master 현재 위치 구하기로 변경
- master 값이 동기 설정에 영향 받지 않도록 하기 위함
- 다축 보정 이송 시, 위치값 오류 해결
- 설정하지 않은 값으로 이송
- 이송 전에
SetAbsRelMode함수를 이용해서 절대/상대 모드를 선택해야 한다 - 이송 시간만큼 sleep 시간 추가
- slave 단축 이송 부분에 sleep 빼고 motion done 코드 추가
- homing 설정에 따라 소요 시간이 다르므로 sleep 대신 motion done을 통해 정지 확인
- 동기 비활성화 후, master 현재 위치 구하기로 변경
- 07.20
- 매뉴얼 수정
- 새 함수 추가
- 함수 사용법 및 절차 수정
- API 설명 수정
- 매뉴얼 수정

There's Only One Thing To Do: Learn All We Can