개요
대부분의 경우 하나의 자원은
한 개의 스마트 포인터에 의해 소유되는 것이 바람직 하고,
나머지 접근은 (소유가 아닌) 그냥 일반 포인터로 처리하면 됩니다.
하지만, 때에 따라서는 여러 개의 스마트 포인터가
하나의 객체를 같이 소유해야 하는 경우가 발생합니다.
예를 들어, 여러 객체에서 하나의 자원을 사용하고자 합니다.
후에 자원을 해제하기 위해서는 이 자원을 사용하는 모든 객체들이 소멸되야 하는데, 어떤 객체가 먼저 소멸되는지 알 수 없기 때문에
이 자원 역시 어느 타이밍에 해제 시켜야 할 지 알 수 없게 됩니다.
따라서 이 경우,
좀 더 스마트한 포인터가 특정 자원을 몇 개의 객체에서 가리키는지를 추적한 다음에,
그 수가 0이 되야만 비로소 해제를 시켜주는 방식의 포인터가 필요합니다.
shared_ptr
shared_ptr로 객체를 가리킬 경우,
다른 shared_ptr 역시 그 객체를 가리킬 수 있습니다.
std::shared_ptr<A> p1(new A());
std::shared_ptr<A> p2(p1); // p2 역시 생성된 객체 A를 가리킨다.
// 반면 unique_ptr의 경우
std::unique_ptr<A> p1(new A());
std::unique_ptr<A> p2(p1); // 컴파일 오류!p1과 p2의 경우 같이 동일한 객체 A()를 가리키지만, unique_ptr의 경우
유일한 소유권만 인정되므로 컴파일 오류가 발생하게 됩니다.
shared_ptr은 같은 객체를 가리킬 수 있습니다.
이를 위해서는 몇개의 shared_ptr 들이 원래 객체를 가리키는지 알아야만 합니다.
이를 참조 개수( Reference Count )라고 하는데,
참조 개수가 0이 되어야 가리키고 있는 객체를 해제할 수 있습니다.
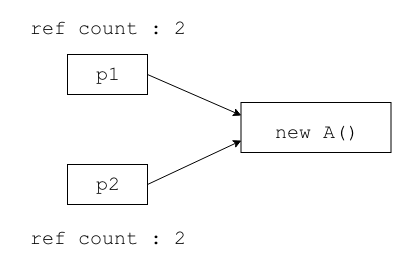
위 그림의 경우 p1과 p2가 같은 객체를 가리키고 있으므로,
참조 개수가 2가 됩니다.
#include <iostream>
#include <memory>
#include <vector>
class A {
int *data;
public:
A() {
data = new int[100];
std::cout << "자원을 획득함!" << std::endl;
}
~A() {
std::cout << "소멸자 호출!" << std::endl;
delete[] data;
}
};
int main() {
std::vector<std::shared_ptr<A>> vec;
vec.push_back(std::shared_ptr<A>(new A()));
vec.push_back(std::shared_ptr<A>(vec[0]));
vec.push_back(std::shared_ptr<A>(vec[1]));
// 벡터의 첫번째 원소를 소멸 시킨다.
std::cout << "첫 번째 소멸!" << std::endl;
vec.erase(vec.begin());
// 그 다음 원소를 소멸 시킨다.
std::cout << "다음 원소 소멸!" << std::endl;
vec.erase(vec.begin());
// 마지막 원소 소멸
std::cout << "마지막 원소 소멸!" << std::endl;
vec.erase(vec.begin());
std::cout << "프로그램 종료!" << std::endl;
}성공적으로 컴파일 하였다면
자원을 획득함!
첫 번째 소멸!
다음 원소 소멸!
마지막 원소 소멸!
소멸자 호출!
프로그램 종료!
위 프로그램의 참조 개수는 3이였다가, 2, 1, 0 순으로 줄어들게 될겁니다.
현재 shared_ptr의 참조 개수가 몇 개인지는
use_count함수를 통해 알 수 있습니다.
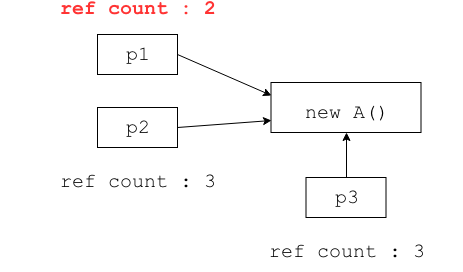
만약에, shared_ptr 내부에 참조 개수를 저장한다면
아래와 같은 문제가 발생할 수 있습니다.
만약, 아래와 같이 한 개의 shared_ptr이
추가적으로 해당 객체를 가리킨다면 어떨까요?
std::shared_ptr<A> p3(p2);와 같이 말이죠. p2의 참조 카운트를 증가시킬 수 있다 해도, p1에 저장되어 있는
참조 개수를 건드릴 수 없습니다.
즉, 아래와 같은 상황이 발생합니다.
따라서 이와 같은 문제를 방지하기 위해,
처음으로 실제 객체를 가리키는 shared_ptr이
제어 블록( Control Block )을 동적으로 할당 후,
shared_ptr들이 이 제어 블록에 필요한
정보를 공유하는 방식으로 구현됩니다.
아래 그림과 같이 말이죠.
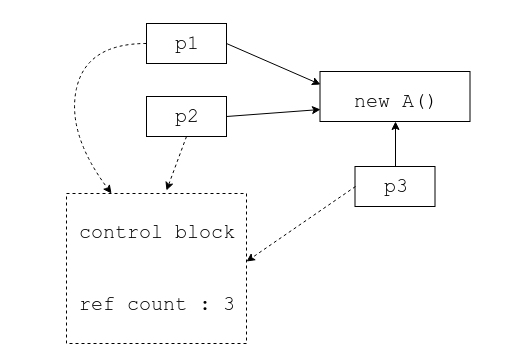
shared_ptr은 복사 생성할 때 마다 해당 제어 블록의 위치만 공유하면 되고,
shared_ptr이 소멸할 때 마다 제어 블록의 참조 개수를 하나 줄이고,
생성할 때 마다 하나 늘리는 방식으로 작동할 것입니다.
make_shared로 생성하자
std::shared_ptr<A> p1(new A());동적 할당은 상당히 비싼 연산입니다. 위 처럼 shared_ptr을 생성하면,
A를 생성하기 위해 동적 할당이 한 번 일어나야 하고,
그 다음 shared_ptr의 제어 블록 역시
동적으로 할당해야 하기 때문이죠.
어차피 동적 할당을 두 번 할 것이라는 것을 알고 있다면,
아예 두 개 합친 크기로 한 번 할당하는 것이 훨씬 빠릅니다.
std::shared_ptr<A> p1 = std::make_shared<A>();shared_ptr 생성 시 주의 할 점
shared_ptr은 인자로 주소 값이 전달된다면,
마치 자기가 해당 객체를 첫번째로 소유하는 shared_ptr인 것 마냥 행동합니다.
예를 들어,
A* a = new A();
std::shared_ptr<A> pa1(a);
std::shared_ptr<A> pa2(a);를 하면, 아래와 같이 두 개의 제어블록이 따로 생성됩니다.
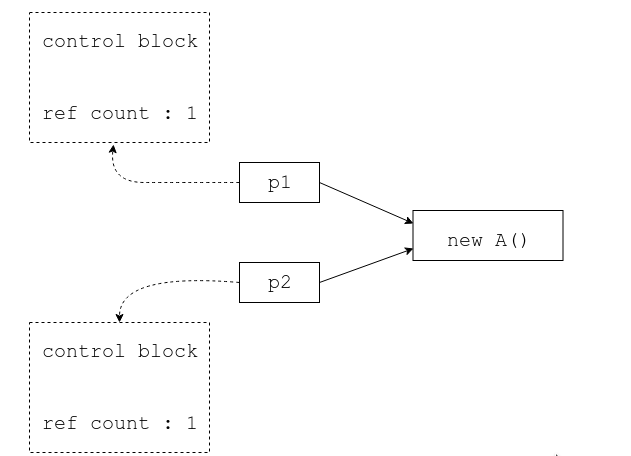
만일 pa1이 소멸되면 참조 카운트가 0이 되어 A를 소멸시킵니다.
pa2가 아직 가리키고 있는데도 말이죠!
#include <iostream>
#include <memory>
class A {
int* data;
public:
A() {
data = new int[100];
std::cout << "자원을 획득함!" << std::endl;
}
~A() {
std::cout << "소멸자 호출!" << std::endl;
delete[] data;
}
};
int main() {
A* a = new A();
std::shared_ptr<A> pa1(a);
std::shared_ptr<A> pa2(a);
std::cout << pa1.use_count() << std::endl;
std::cout << pa2.use_count() << std::endl;
}위를 컴파일 하면, 소멸자가 두 번 호출되며 오류가 발생합니다.
위와 같은 상황을 방지하려면
shared_ptr을 주소값을 통해서 생성하는 것을 삼가해야 합니다.
하지만, 객체 내부에서 자기 자신을 가리키는 shared_ptr을 만들 때처럼
어쩔 수 없는 상황도 있습니다.
이 문제는 enable_shared_from_this 를 통해 깔끔하게 해결이 가능합니다.
enable_shared_from_this
우리가 this를 사용해서 shared_ptr을 만들고 싶은 클래스가 있다면,
enable_shared_from_this를 상속 받으면 됩니다.
#include <iostream>
#include <memory>
class A : public std::enable_shared_from_this<A> {
int *data;
public:
A() {
data = new int[100];
std::cout << "자원을 획득함!" << std::endl;
}
~A() {
std::cout << "소멸자 호출!" << std::endl;
delete[] data;
}
std::shared_ptr<A> get_shared_ptr() { return shared_from_this(); }
};
int main() {
std::shared_ptr<A> pa1 = std::make_shared<A>();
std::shared_ptr<A> pa2 = pa1->get_shared_ptr();
std::cout << pa1.use_count() << std::endl;
std::cout << pa2.use_count() << std::endl;
}위를 컴파일 하면
자원을 획득함!
2
2
소멸자 호출!
와 같이 작동합니다.
enable_shared_from_this 클래스에는
shared_from_this라는 멤버 함수를 정의하고 있는데,
이 함수는 이미 정의되어 있는 제어 블록을 사용해서 shared_ptr을 생성합니다.
따라서, 이전처럼 같은 객체에
두 개의 다른 제어 블록이 생성되는 일을 막을 수 있습니다.
한 가지 중요한 점은 shared_from_this가 잘 작동하기 위해서는
해당 객체의 shared_ptr이 반드시 먼저 정의가되어 있어야합니다.
shared_from_this`는 존재하는 제어 블록을 확인만 할 뿐,
없는 제어 블록을 만들지 않습니다.
즉, 다음 코드는 오류가 발생합니다.
A* a = new A();
std::shared_ptr<A> pa1 = a->get_shared_ptr();서로 참조하는 shared_ptr
shared_ptr은 참조 개수가 0이되면
가리키는 객체를 메모리에서 해제시킨다고 했습니다.
그런데, 객체들을 더 이상 사용하지 않음에도 불구하고
참조 개수가 0이 될 수 없는 상황이 있습니다.
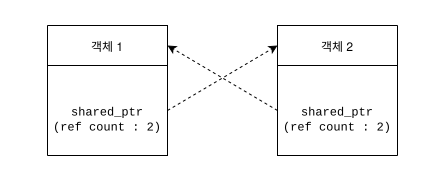
위 그림의 경우 각 객체는 shared_ptr을 하나씩 가지고 있는데,
이 shared_ptr이 다른 객체를 가리키고 있습니다.
즉, 객체 1의 shared_ptr은 객체 2를 가리키고 있고,
객체 2의 shared_ptr은 객체 1을 가리키고 있죠.
만약 객체 1이 파괴가 되기 위해서는
객체 1을 가리키고 있는 shared_ptr의 참조 개수가 0이 되어야만 합니다.
즉, 객체 2가 파괴가 되어야겠죠.
하지만 객체 가 파괴되기 위해서는 마찬가지로 객체 2를 가리키고 있는
shared_ptr의 참조 개수가 0이 되어야하는데, 그러기 위해서는 객체 1이 파괴되어야만 합니다.
#include <iostream>
#include <memory>
class A {
int *data;
std::shared_ptr<A> other;
public:
A() {
data = new int[100];
std::cout << "자원을 획득함!" << std::endl;
}
~A() {
std::cout << "소멸자 호출!" << std::endl;
delete[] data;
}
void set_other(std::shared_ptr<A> o) { other = o; }
};
int main() {
std::shared_ptr<A> pa = std::make_shared<A>();
std::shared_ptr<A> pb = std::make_shared<A>();
pa->set_other(pb);
pb->set_other(pa);
}성공적으로 컴파일 하였다면,
자원을 획득함!
자원을 획득함!
위와 같이 소멸자가 제대로 호출되지 않음을 알 수 있습니다.
이 문제는 shared_ptr자체에 내재되어 있는 문제이기에
shared_ptr을 통해서는 이를 해결할 수 없습니다.
이러한 순환 참조 문제를 해결하기 위해 나타난 것이 바로 weak_ptr입니다.
weak_ptr
weak_ptr은 일반 포인터와 shared_ptr 사이에 위치한 스마트 포인터로,
스마트 포인터처럼 n객체를 안전하게 참조할 수 있게 해주지만,
shared_ptr과는 다르게 참조 개수를 늘리지는 않습니다.
이름 그대로 약한 포인터 인것이지요
이 때문에, weak_ptr 자체로는 원래 객체를 참조할 수 없고,
반드시 shared_ptr로 변환해서 사용해야 합니다.
이 때 가리키고 있는 객체가 이미 소멸되었다면, 빈 shared_ptr로 변환되고, 아닐경우 해당 객체를 가리키는 shared_ptr로 변환됩니다.
#include <iostream>
#include <memory>
#include <string>
#include <vector>
class A {
std::string s;
std::weak_ptr<A> other;
public:
A(const std::string& s) : s(s) { std::cout << "자원을 획득함!" << std::endl; }
~A() { std::cout << "소멸자 호출!" << std::endl; }
void set_other(std::weak_ptr<A> o) { other = o; }
void access_other() {
std::shared_ptr<A> o = other.lock();
if (o) {
std::cout << "접근 : " << o->name() << std::endl;
} else {
std::cout << "이미 소멸됨 ㅠ" << std::endl;
}
}
std::string name() { return s; }
};
int main() {
std::vector<std::shared_ptr<A>> vec;
vec.push_back(std::make_shared<A>("자원 1"));
vec.push_back(std::make_shared<A>("자원 2"));
vec[0]->set_other(vec[1]);
vec[1]->set_other(vec[0]);
// pa 와 pb 의 ref count 는 그대로다.
std::cout << "vec[0] ref count : " << vec[0].use_count() << std::endl;
std::cout << "vec[1] ref count : " << vec[1].use_count() << std::endl;
// weak_ptr 로 해당 객체 접근하기
vec[0]->access_other();
// 벡터 마지막 원소 제거 (vec[1] 소멸)
vec.pop_back();
vec[0]->access_other(); // 접근 실패!
}성공적으로 컴파일 시,
자원을 획득함!
자원을 획득함!
vec[0] ref count : 1
vec[1] ref count : 1
접근 : 자원 2
소멸자 호출!
이미 소멸됨 ㅠ
소멸자 호출!
와 같이 나옵니다.
일단 weak_ptr의 정의부를 봅시다.
vec[0]->set_other(vec[1]);
vec[1]->set_other(vec[0]);set_other함수는 weak_ptr<A>를 인자로 받는데,
여기에 shared_ptr을 전달했습니다.
즉, weak_ptr은 생성자로 shared_ptr이나 다른 weak_ptr을 받습니다.
또한, shared_ptr과는 다르게 이미 제어 블록이 만들어진 객체만이 의미를 가지기에,
평범한 포인터 주소 값으로 weak_ptr의 생성은 불가합니다.
그 다음으로 살펴볼 부분은 실제 weak_ptr을 shared_ptr로 변환하는 과정입니다.
void access_other()
{
std::shared_ptr<A> o = other.lock();
if (o)
{
std::cout << "접근 : " << o->name() << std::endl;
}
else
{
std::cout << "이미 소멸됨 ㅠ" << std::endl;
}
}앞서 말했듯이, weak_ptr 그 자체로는 원소를 참조할 수 없고,
shared_ptr로 변환해야 한다고 했습니다.
이 작업은 lock 함수를 통해 수행할 수 있습니다.
weak_ptr에 정의된 lock 함수는
만일 weak_ptr이 가리키는 객체가 메모리에서 살아있다면
해당 객체를 가리키는 shared_ptr을 반환하고, 이미 해제가 되었다면
아무것도 가리키지 않는 shared_ptr을 반환합니다.
앞서 제어블록에는
몇개의 shared_ptr이 가리키고 있는지를 나타내는 참조 개수가 있다고 했습니다.
그리고 참조 개수가 0이되면 해당 객체를 메모리에서 해제하는 것도 알고 있지요.
그렇다면 참조 개수가 0이 될 때, 제어 블록역시 메모리에서 해제해야 할까요?
아닙니다.
만약에 가리키는 shared_ptr은 0이지만, 아직 weak_ptr이 남아있다면
객체는 해제 되어 있겠지만, 제어 블록을 해제하면
제어 블록에서 참조 카운트가 0인걸 알 수가 없습니다.
즉, 제어 블록을 메모리에서 해제하기 위해서는
이를 가리키는 weak_ptr역시 0개여야합니다.
따라서 제어 블록에는 참조 개수와 더불어 약한 참조 개수를 기록하게 됩니다.
참조 : 모두의 코드
