이 게시물은 장형기님의 SLAM 기술 면접 질문 100선에 대한 제 나름대로의 답을 정리한 게시물입니다.
Point Cloud
-
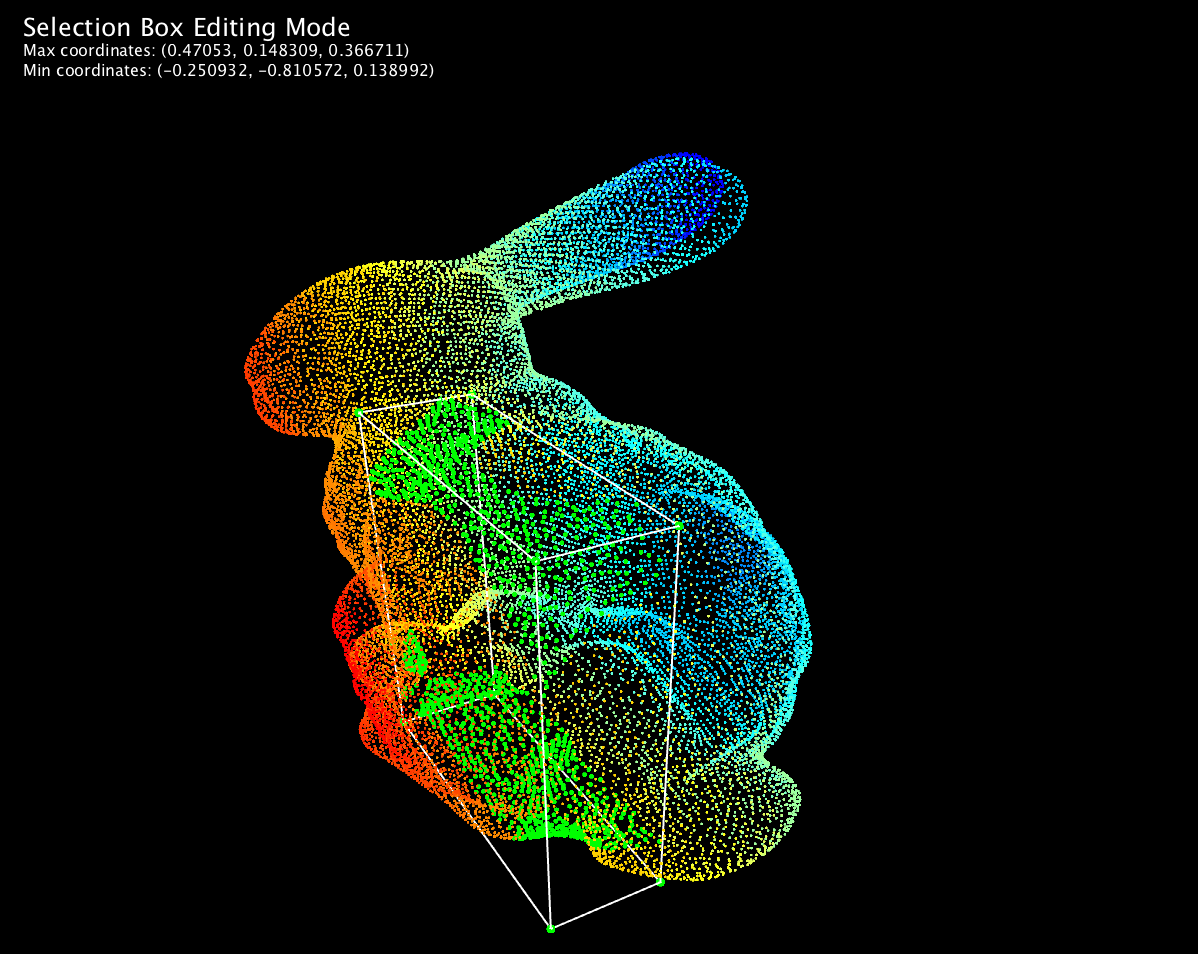
정의
3D 공간상의 점들의 집합입니다.
각 점은 일반적으로 (x,y,z) 위치를 갖고, 경우에 따라 색상(RGB), 강도(intensity), normal vector 등도 포함됩니다. -
특징
-
구조 없음: 점들 사이에 연결 관계가 없음
-
센서: LiDAR, depth camera, stereo vision 등에서 얻는 대표 출력
-
빠르고 가볍지만, 표면 구조나 형상 표현이 약함
-
-
사용 예시
-
LiDAR 센서를 visualization이나 계산할 때 사용
-
객체 인식 전처리
-
Mesh
-
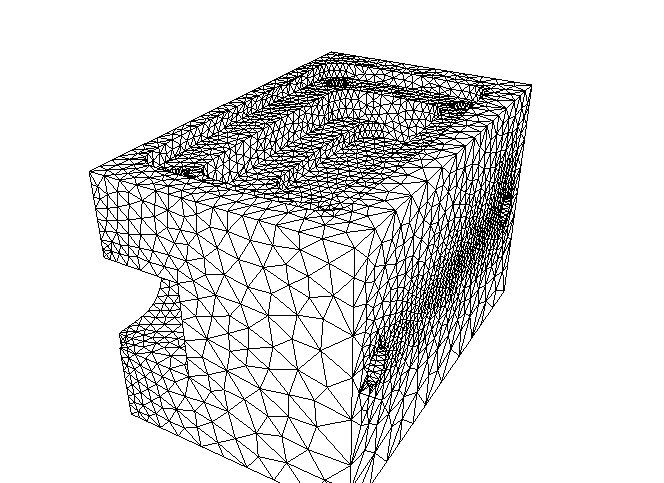
정의
점들을 edge로 연결하고, 이들을 이어서 면을 만든 구조
주로 삼각형이나 사각형을 사용
-
특징
- 기하학 + 위상 정보를 모두 가짐
- 더 정확한 표면 표현 가능
- 정밀한 물리 시뮬레이션, 랜더링에 적합
Surfel
-
정의
Surface + element의 합성어로, 한점에 노멀 + 면적 + 방향성 정보를 부여한 단위
보통 작은 원판처럼 생각함 -
특징
-
Point cloud보다는 더 많은 국소 표면 정보 공유
-
Mesh보다는 가볍고, 실시간 처리에 적합
-
구조화된 점군이라고 볼 수 있음
-
-
사용 예시
-
증강 현실에서 빠른 surface rendering
-
Depth sensor 기반 표면 재구성
저는 mesh와 pointcloud밖에 사용을 안해봤는데 surfel은 노멀vector를 가진 아주 작은 단위 같아 보입니다.
-

student