2. Intelligent Agents
- 특정 기능을 수행하는 어떤 것 : Agents
2.1 Agents And Environments
agent가 환경으로 부터 어떤 데이터를 받아들이는 입력수단은 센서
센서를 통해 입력을 받아들인 후 Actuators(센서)를 사용하여서 출력기능을 수행한다.
지금까지 학자를 비롯하여 인공지능 분야의 사람들은 agents's percept sequence를 잘 다루기 위해 노력해 왔습니다.
예를 들어서 자율주행자동차가 단순히 외부 상황을 입력받아서 운전만 하는 것이 아닌 상황에 맞추어 적절한 행동을 취할 수 있도록 만드는 등의 연구의 과정이 필요합니다.

요약하자면 위와 같이 percept sequence를 살피어서 행동하도록 agent function을 만들어야 합니다.
agent program은 좀 더 포괄적인 개념
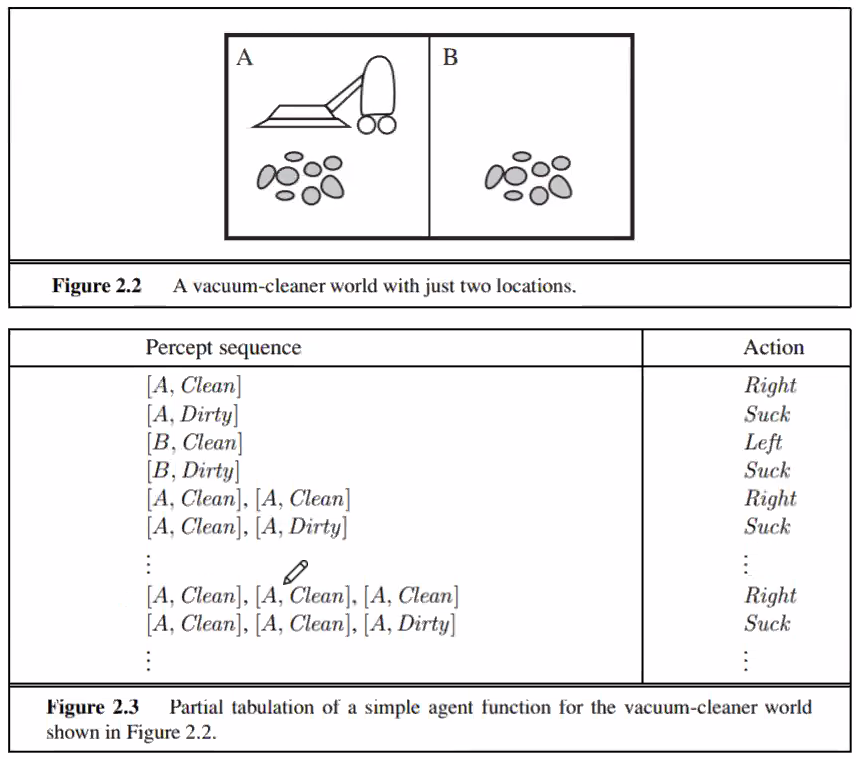
Percept Sequence 예시
2.2 Good Behavior : The Concept of Rationality
Good은 상대적이지만 Rationality 하게 agent가 행동을 하도록 하는 것
performance measure : 주어진 상황에서 인공지능의 성능 측정방법
2.2.1 Rationality
- The performance measure that defines the criterion of success. (성능 측정 방법 정의)
- The agent's prior knowledge of the environment. (환경에 대한 agent의 사전 지식)
- the actions that the agent can perform (agent의 action)
- the agent's percept sequence to date (agent의 단계별 행동)
Definition of a rational agent(요약, 시험):
For each possible percept sequence, a rational agent should select an action that is expected to maximize its performance measure, given the evidence provided by the percept
sequence and whatever built-in knowledge the agent has.
각 가능한 지각순서들 떄문에, 합리적인 agent는 최고의 평가를 받을 수 있는 행동을 수행하여야 합니다, 사전에 주어진 지각순서와 가지고 있는 지식에 상관없이 말입니다.
2.2.2 Omniscience, learning, and autonomy
전지전능하고 배우고 자율적인
Omniscience : 행동에 따른 결과를 agent가 정확하게 하는 것을 이야기 하지만 현실에서는 이걸 정확하게 만들어 내는 것은 불가능하다.
- 스킵 -
infromation gathering도 계속해서 수행되어 새로운 정보를 받아가야한다. -> exploration
Learning : agent가 정보를 수집하는 것뿐만이 아닌 얻은 정보로 부터 많이 배워야 합니다.
autonomy : autonomy을 통하여서 부분적이거나 옳지 못한 내용을 수정할 줄 도 알아야 합니다.
2.3 The Nature of Environments
2.3.1 Specifying the task environment
task environment를 묘사하는 4가지 PEAS(Performance, Environment, Actuators, Sensors)
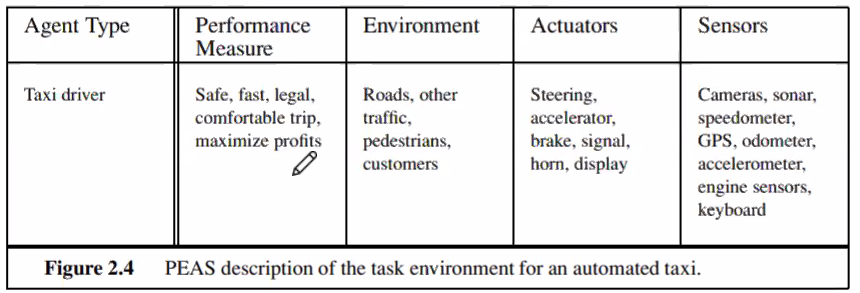
PEAS 예시1
software agents (software robots of softbots)은 웹사이트에서 검색머신을 제공하는 것을 예시로 들 수 있다. 인터넷 상에서 전문지식이나 전문기술들을 제공하는 역활을 수행하는 것을 의미함
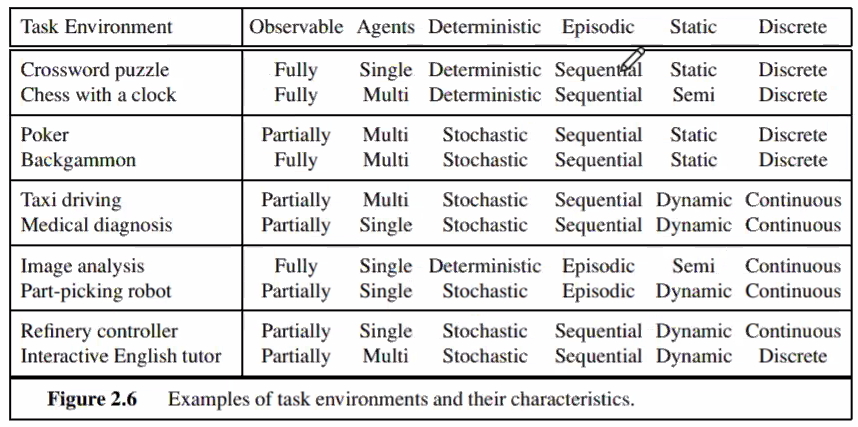
2.3.2 Properites of task environments
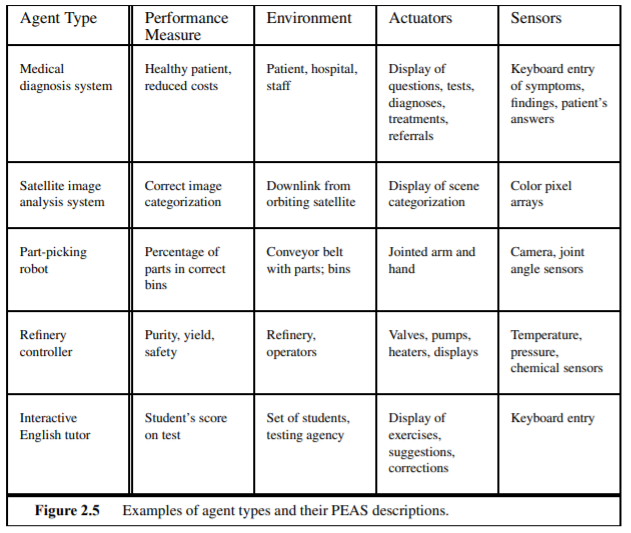
PEAS 예시2
task environmet는 성질상 peas에 따라 나눈다고 하더라도 사실상 모든 것을 획일적으로 단순기준에 의해서 구분을 한다는 것은 어렵기 때문에 이때 관찰 할 수 있는 대상이 달라짐
Fully Observable vs Partially Observable
Fully : 사람과 같이 우리 스스로도 매우 잘 아는 것
Partially : 완전히 관찰 불가능한 경우
Single agent vs Multi Agent
홀로 vs 다수
Deterministic(결정적) vs Stochastic(확률적)
Stochastice : 가능성이 높은 것을 선택
Episodic vs Sequential
일시적 vs 지속적
Static vs Dynamic
정적 vs 동적
Discrete vs Continuous
분별가능 vs 연속적
Known vs Unknown
아는 것 vs 모르는 것
결과적으로 하나의 agent에서도 열개의 Property를 가질 수 있다.