
PWM을 이용해서 모터를 돌린 후 엔코더를 이용해 속도를 피드백 받는 것을 구현하였는데, 구현한 코드와 이와 관련 되어 개념 공부한 내용들에 대해서 정리해보려 한다.
구현 내용은 다음과 같다.
- DC모터 드라이버를 이용해 모터 드라이버 제작
- PWM을 이용해 DC모터 구동
- 엔코더 펄스를 외부 인터럽트로 카운팅 한 후 속도 계산
- 3초 간 시계방향, 3초 간 정지, 3초 간 반시계방향, 3초 간 정지
PWM과 관련해서는 이전에 공부한 적이 있으므로 바로 엔코더에 대해서 공부한 내용들을 정리해보려 한다.
📌 엔코더
엔코더란 물리적인 환경으로부터 피드백을 제공하는 장치이다.
정밀한 움직임의 위치를 피드백 받아서 제어를 할 수 있기 때문에 모터의 회전 속도, 회전 방향등을 알 수 있다.
엔코더는 물체의 움직이는 운동방식, 검출 방식, 움직이는 물체의 위치를 파악하는 방식에 따라 구분이 가능하다.
🍀물체의 움직이는 운동방식
물체의 움직이는 운동방식에 따라서는 로터리 엔코더와 리니어 엔코더로 구분할 수 있다.
✨로터리 엔코더
- 회전하는 물체의 움직임의 위치를 피드백하는 장치
- 원형으로 된 스케일과 스케일 사이의 간격을 읽어들이는 헤드로 구성
- 헤드가 스케일 사이의 간격마다 펄스 신호를 읽어들여 아날로그 신호를 디지털 신호로 변환하여 회전하는 모터의 회전 속도, 회전량을 측정할 때 사용
✨리니어 엔코더
- 직선 운동을 하는 물체의 움직임의 위치를 피드백 하는 장치
- 스케일과 스케일 사이의 간격을 읽어들이는 헤드로 구성
- 헤드가 스케일 사이의 간격마다 펄스 신호를 읽어들여 직선운동을 하는 물체의 위치와 속도를 측정할 때 사용
🍀검출 방식
검출 방식에 따라서는 접촉식과 비접촉식으로 구분이 가능한데, 비접촉식방식의 경우 광학식과 자기식으로 나눌 수 있다.
✨광학식 엔코더
- 신호검출에 광센서 사용
- 일정한 패턴으로 구멍이 뚫려있는 디스크를 가진 회전부와 이 회전부를 중심으로 앞 쪽은 발광부, 뒷쪽은 수광부로 이루어짐
- 발광부의 빛이 회전 디스크를 통과하여 수광부에서 수신되는 빛을 이용한 전기 신호를 제공하는 광학센서를 사용하여 디지털 펄스 신호로 출력
✨자기식 엔코더
- 신호 검출에 자기센서 사용
- 일정 간격으로 자화된 자기 드럼이 회전하면, 회전 각도에 따라 홀 소자로부터 출력되는 펄스 수를 계수해서 각도 검출
- 광학식에서는 발광소자가 전력을 소비하는데 비해서 자기식에서는 소비 전력이 작음
- 단점 : 자계가 존재하는 장소에서는 사용에 제약을 받음
🍀움직이는 물체의 위치를 파악하는 방식
움직이는 물체의 위치를 파악하는 방식에 따라서는 인크리멘탈 엔코더와 절대식 엔코더로 나뉜다.
✨인크리멘탈형 엔코더
- 점진적으로 증가하는 형식
- 엔코더가 돌아갈 때 발생되는 파형의 횟수를 통해 회전축의 회전속도 측정
- 일정한 방향으로 회전하는 기기에 사용하기 적합한 방법
✨절대식형 엔코더
- 회전축의 0도 지점을 기준으로 360도를 일정한 비율로 분할
- 분할 된 각도마다 인식 가능한 전기적인 디지털 코드를 지정하여 측정
- 이 때, 출력 값을 출발점(기준점)으로 다시 설정해주어야 함
📌 엔코더 펄스 수
엔코더 펄스 수에 대해서 정리하기 전에 PPR과 체배가 무엇인지에 대해서 먼저 알아야한다.
PPR이란 Pulse Per Revolution의 약자로 분해능을 의미한다.
즉, 엔코더의 회전축이 1회전 하는 동안 출력되는 펄스의 수를 의미한다.
체배란 A rising, A falling, B rising, B falling등의 edge를 몇 개 사용하여 각도를 측정할 것인가에 대한 것이다. 4개 중 1개의 edge를 사용하는 것이 1체배, 2개를 사용하는 것이 2체배, 4개를 사용하는 것이 4체배이다.
체배가 높을 수록 보다 정확한 각도를 알 수 있다.
예를 들어, 11PPR 엔코더를 생각해보자. 엔코더의 회전축이 1회전 하는 동안 한 개의 채널에서 11개의 펄스가 출력이 되며, 2개의 채널이 존재한다. 따라서 펄스 수는 22개이며, 한 펄스 당 2개의 edge가 존재한다. 따라서, 총 44개의 edge가 발생하게 된다.
즉, 한 바퀴에 44개의 edge를 발생시킨다. 다시 말하면, 360도 회전할 때 44개의 edge를 발생시킨다.
| 한 펄스당 감지하는 edge의 개수 | 한 바퀴당 감지하는 edge의 개수 | 한 edge당 회전 각도 | |
|---|---|---|---|
| 1체배 | 1 | 11 | 32.73(정확도 낮음) |
| 2체배 | 2 | 22 | 16.36 |
| 4체배 | 4 | 44 | 8.18(정확도 높음) |
📌 모터 회전 원리
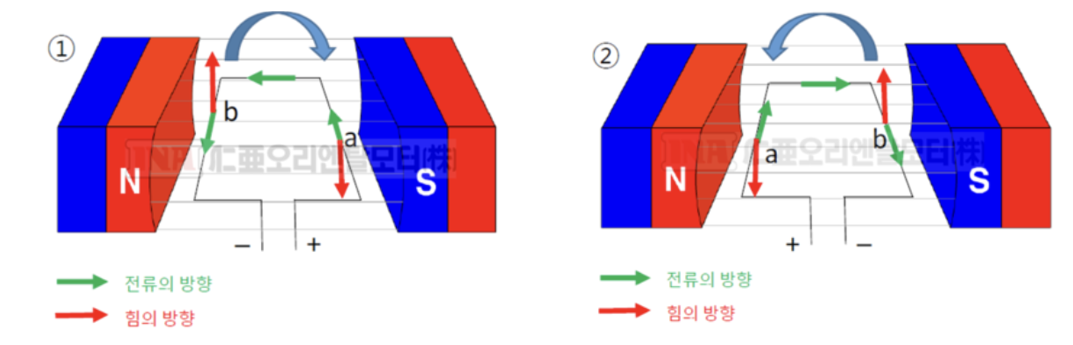
- 자기장이 흐르는 곳에 코일을 감은 회전축에 직류 전류를 흘려주어 발생하는 전자력에 의해서 코일 회전
- a : 힘의방향 아래쪽, b : 힘의방향 윗쪽 ➡ 180도 회전 후 2번과 같은 상태
- 결과적으로 모터는 반대방향으로 180도 회전
- 전류의 방향이 바뀌지 않으면 직류 전동기는 한 방향으로 회전 불가능
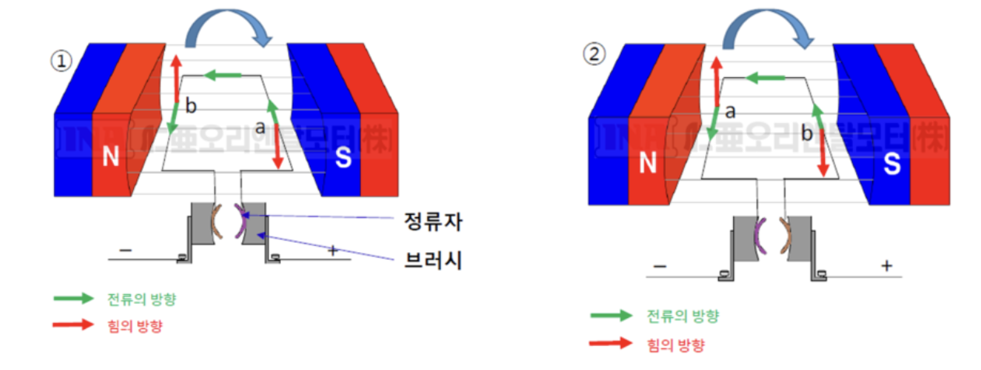
- 앞의 문제점을 해결하기 위해 정류자 사용
- 정류자 : 회전자가 계속하여 회전할 수 있도록 코일의 전류 방향을 바꿔주는 역할
- 1번 그림에서 180도 회전 후 정류자를 이용해 전류 방향을 변경하여 같은 방향으로 계속 회전
📌 모터 종류
내가 사용한 모터는 브러쉬 모터였지만, 세미나 공부를 하면서 다른 모터들에 대해서도 알아보았다.
✨기어드 모터
- 모터의 속도를 감속시켜줌
- 파워를 높여줌
- 회전축은 모터에 비해 천천히 돌지만, 힘은 매우 강력해짐
- 쉽게 마모되고, 파손률이 높음
- 감속기의 감속비가 높을 수록 토크도 그만큼 증가됨
토크란 회전축에서 힘의 작용점까지의 거리와 회전축과 작용점을 잇는 직선에 수직인 힘의 성분과의 곱을 의미한다.
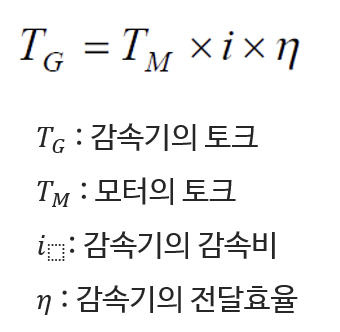
알아보니 이런 공식이 있던데, 이 공식대로라면 감속기의 감속비가 높을수록 감속기의 토크가 증가한다는 건 당연한 말이었다.
✨스태퍼 모터
- 다수의 톱니모양 전자석이 금속 기어를 중심으로 주변에 매치 되어있음
- 제어회로로부터 전류를 받아 작동하므로 제어장치 드라이버 필요
- 진동, 소음 발생이 쉬움
✨서보 모터
- 전류가 공급되면 브러시를 통해 정류자로 전류 전달
- 정류자로 이동한 전류는 모터 내부 코일로 이동
- 입력측(정류자 쪽)에서 출력측(구동부와 연결되는 쪽)으로 움직이는 전류는 코일을 위로 움직이게하고, 다시 반대로 돌아오는 전류는 코일을 아래쪽으로 움직이게 하여 축 회전
✨브러쉬 모터
- 전기를 가해주면 코일이 감겨있는 중앙부분이 자기화되면서 힘이 생겨 돌아감
- 장점 : 가격 저렴, 구동 간단
- 단점 : 브러쉬가 정류자에 접촉되어 있어 모터가 회전하게 되면 정류자가 달아서 없어지고, 열이 발생하여 모터가 뜨거워짐
✨브러쉬리스 모터
- 외부의 영구자석 쪽이 회전을 하고, 중심부가 고정되어 있음
- 장점 : 브러쉬가 없어 수명이 길고, 발열이 적음
- 단점 : 가격이 비쌈
📌 모터의 회전 속도
모터의 회전속도를 측정하는 방법은 M 방법과 T 방법으로 나뉜다.
나 같은 경우, 모터를 돌릴 때 M 방법을 사용하여 구현하였다.
🍀M 방법
- M 방법 : 일정 시간마다 펄스를 세는 방법
- 1초동안 펄스가 몇 개 들어오는지 세고 있다가 1초마다 센 펄스의 숫자를 이용하여 회전 속도를 측정하는 방법
- 회전 속도가 매우 느려질 때 문제가 발생한다.
예를 들어, 1초마다 펄스의 개수를 세는데 펄스가 3초에 한 번씩 들어와버리면 제대로 측정을 못하게 된다.

RPM 즉, 분당 회전수를 구하는 공식은 위와 같다.
🍀T 방법
- T 방법 : 모터에서 들어오는 펄스 사이의 간격을 측정하는 방법
- 첫 번째 신호가 들어오고, 다음 신호가 몇 초 뒤에 들어오는가를 기준으로 계산
- 고속일 때 문제가 발생한다.
카운터가 하나 증가하는 동안 수십개의 모터 펄스가 들어오면 속도를 정확히 알 수 없다.

RPM을 구하는 공식은 위와 같다.
📌 RB-35GM 21TYPE(12V) with 2channel Encoder
내가 사용한 모터는 RB-35GM 21TYPE(12V) with 2channel Encoder인데, 이 모터의 사양에 대해 정리하기 전, 기어비와 토크가 무엇인지에 대해서 정리해보려고 한다.
✨기어비
- 맞물린 두 기어의 잇수 간의 비율 (입력 측 잇수/출력 측 잇수)
- EX) 기어의 잇수가 각각 20개, 40개일 경우 1:2비율 ➡ 감속비 = 1/2
✨토크
- 회전체를 돌리기 위한 회전력
- 정격 토크 : 모터의 정격 회전수에서 낼 수 있는 회전력
✨RB-35GM 21TYPE(12V) with 2channel Encoder
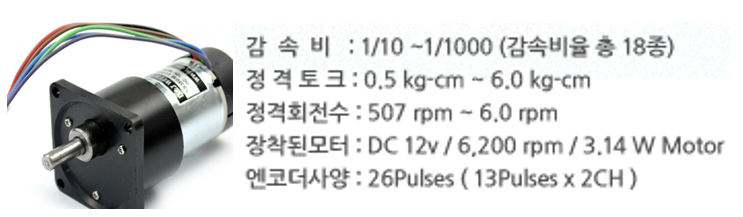

내가 사용한 모터의 기어비는 1/18이며, 무부하 회전수는 6200 RPM이었다.
- 듀티비 100% : RPM = 6200/18 = 344.44
- 듀티비 60% : RPM = 6200/18 * 0.6 = 206.66
- 듀티비 50% : RPM = 6200/18 * 0.5 = 172.22
- 듀티비 40% : RPM = 6200/18 * 0.4 = 137.77
📌 엔코더 홀센서
홀 센서 : 자기장을 감지하는 센서
홀 효과 : 도체 또는 반도체 내부에 흐르는 전하의 이동방향에 수직한 방향으로 자기장을 가하게 되면 금속 내부의 전하 흐름에 수직한 방향으로 전위차가 형성되게 되는 현상
📌 L298N 모터 드라이버
5V의 전압으로 높은 전압, 전류의 모터를 돌려야하기 때문에 L298N 모터 드라이버를 사용하였다.
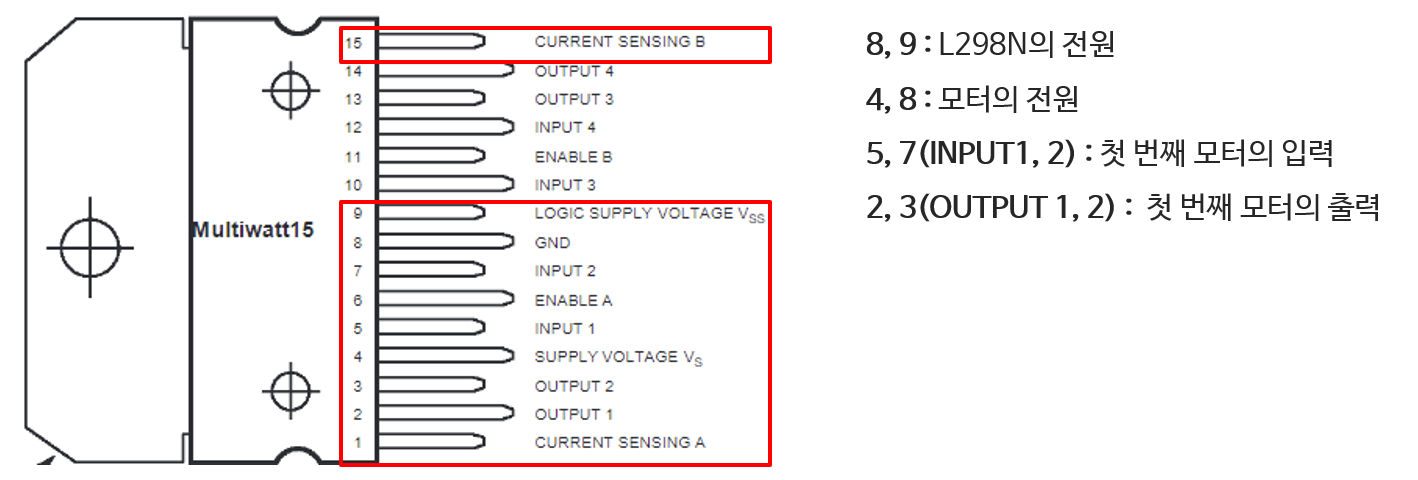
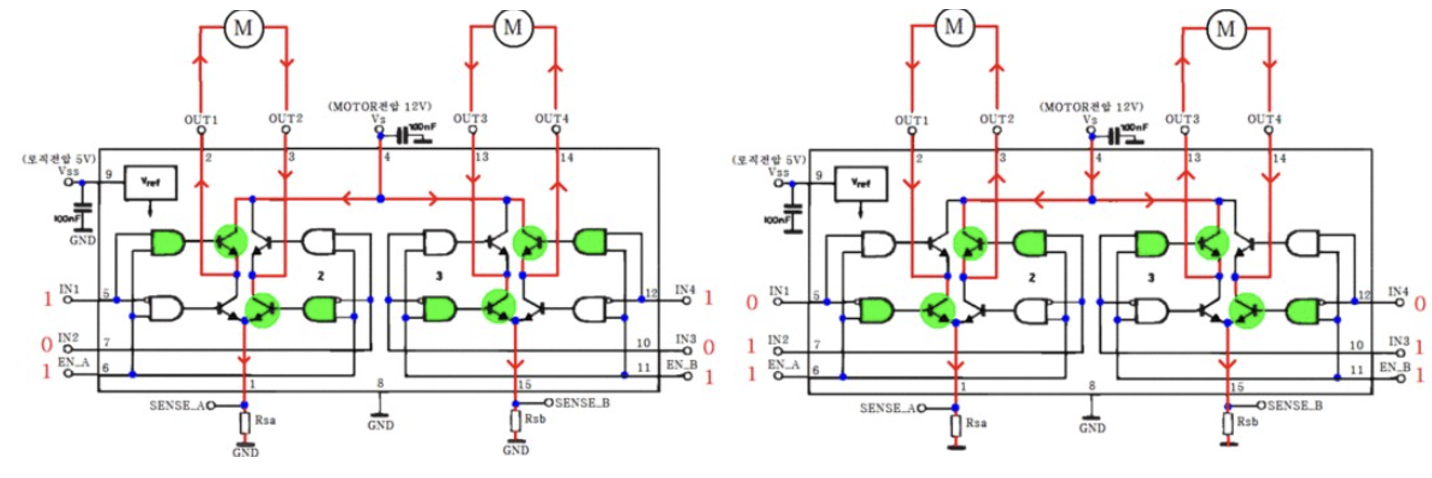
- EN_A를 High로 하고 INPUT1,2에 MCU 핀과 연결
- MCU에서 +-이면 정회전, -+이면 역회전
- AND 게이터의 한 쪽이 EN_A와 연결되어 있어 EN_A가 High가 아니면 트랜지스터에 전압이 공급되지 않음
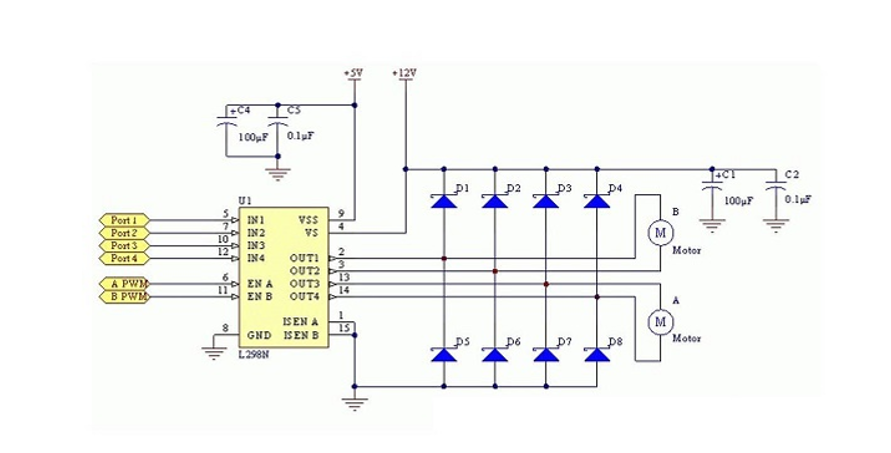
L298N 모터 드라이버 관련 납땜 회로도인데, 커패시터와 다이오드도 사용해주었다.
- 커패시터 : 노이즈 방지용
- 다이오드 : 모터가 회전하면 전기가 발생하는데, 다이오드 없이 그대로 연결하면 L298N 칩에 손상이 가해져서 사용
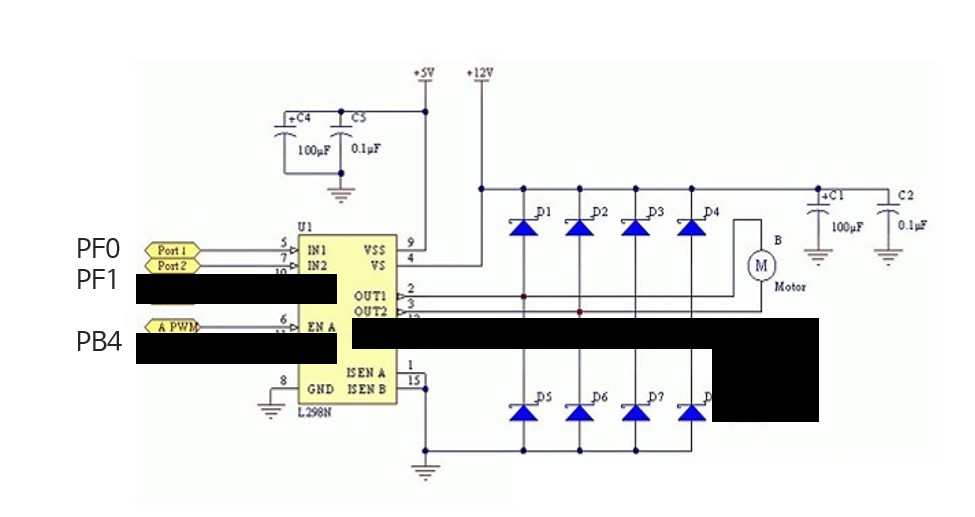
하나의 L298N 모터 드라이버에 두 개의 모터를 연결해줄 수 있는데, 나는 하나의 모터만 연결할 것이므로 INPUT1은 PF0와 연결해주었고, INPUT2는 PF1, 그리고 EN_A은 PB4과 연결해주었다.
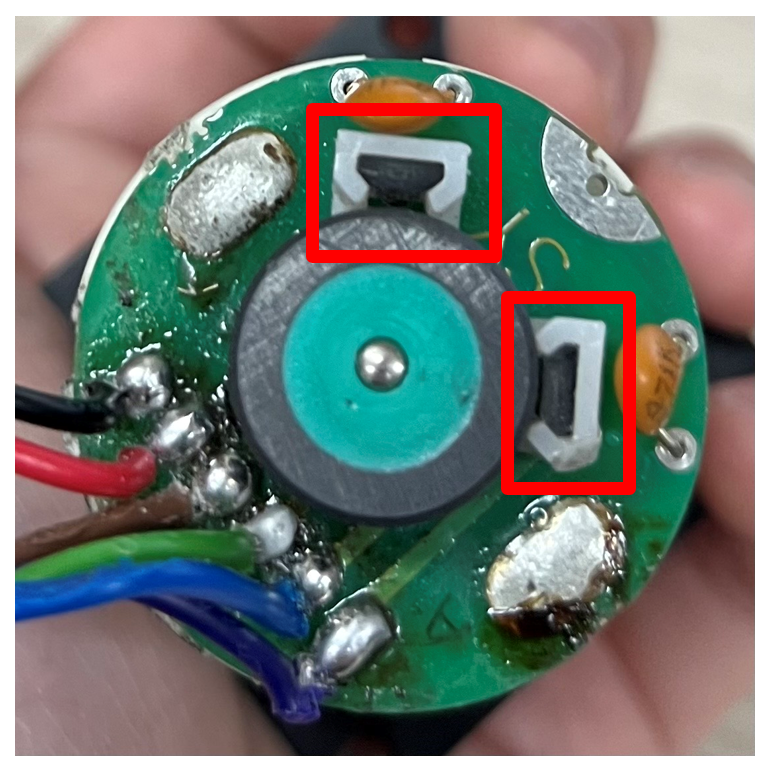
📌 엔코더 커넥터
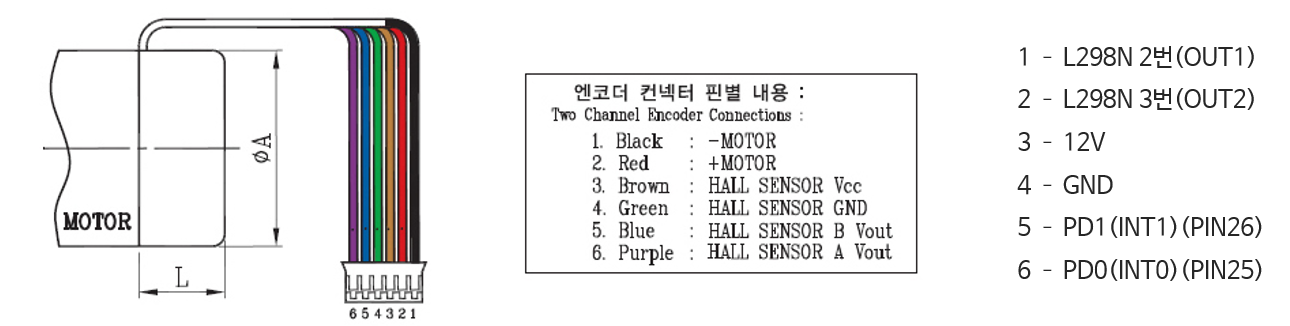
엔코더 커넥터의 경우 사진의 오른쪽에 보이는 것처럼 연결해주었다.
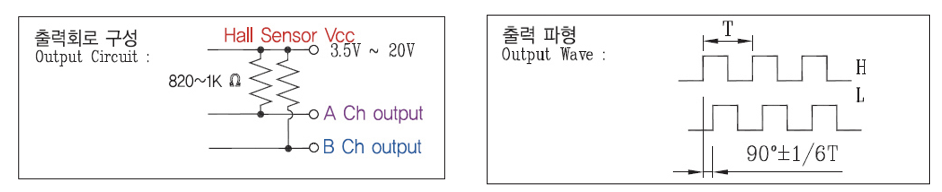
처음에 납땜할 때 출력 회로 구성 부분을 못 봤어서 저항없이 바로 연결할 뻔 했는데, 출력 회로 구성 시 A Ch output과 B Ch output 부분과 Hall Sensor Vcc를 연결할 때 사이에 저항을 연결해주어야 한다.
🧷 코드
#define F_CPU 16000000UL // 16MHz
#define per_sec 1000 // 타이머 카운터 1초
#define sbi(PORTX,bitX) PORTX |= (1 << bitX) // Set Bit Instruction
#define cbi(PORTX,bitX) PORTX &= ~(1 << bitX) // Clear Bit Instruction
#include <avr/io.h>
#include <stdio.h>
#include <avr/interrupt.h>
#include <util/delay.h>
#include "lcd.h" // lcd 헤더파일
#include "init_fn.h" // 포트, 레지스터, 듀티비 설정 헤더파일
volatile unsigned int time_cnt = 0; // 1초마다 1씩 올라가는 변수
volatile int pulse_cnt = 0; // 펄스 카운트 해주는 변수
volatile float rpm = 0; // rpm값
volatile char str_pulse_cnt[16]; // pulse_cnt값 lcd에 출력하기 위한 문자열
volatile char str_rpm[16]; // rpm값 lcd에 출력하기 위한 문자열
volatile int dir = 0; // CW, 정지, CCW, 정지코드가 너무 길어져 포트, 레지스터, 듀티비 설정 관련해서는 파일분할을 해주었다.
#define F_CPU 16000000UL
#include <avr/io.h>
#include <avr/interrupt.h>
#define per_sec 1000
void init_port(void)
{
//포트 초기 설정
DDRA = 0xff; //LED
DDRC = 0xff; //LCD
DDRE = 0xe0; //LCD
DDRB = (1 << PB4); //모터드라이버 EN_A
DDRD = (0 << PD0) | (0 << PD1); //홀센서 입력
DDRF = (1 << PF0) | (1 << PF1); //모터드라이버 출력
PORTA = 0xff;
}
void init_int0_reg(void)
{
//INT0 인터럽트 레지스터 초기 설정
EICRA = (1 << ISC01) | (1 << ISC00); //상승엣지일 때 인터럽트 발생
EIMSK = (1 << INT0); //INT0 허용
}
void init_tc0_reg(void)
{
//타이머카운터0 레지스터 설정
TCNT0 = 256 - (F_CPU / per_sec / 64);
TCCR0 = (1 << CS02) | (1 << WGM01) | (1 << WGM00) | (1 << COM01);
// 분주비64, 비교매치OC0 출력, Fast PWM Mode
TIMSK = (1 << TOIE0); //오버플로우 인터럽트 허용
}
void set_dutyratio(float ratio) //원하는 듀티비 입력받아 OCR0값 계산
{
OCR0 = 255.0 * (ratio / 100.0);
}포트, 레지스터, 듀티비 설정 관련 부분이다.
ISR(INT0_vect) // 외부 인터럽트
{
if(PIND == 0x01) // CW
{
pulse_cnt++;
}
else //CCW
{
pulse_cnt--;
}
}
ISR(TIMER0_OVF_vect) // 타이머카운터0 오버플로우 인터럽트
{
time_cnt++; //타이머 발생횟수 1 증가
TCNT0 = 256 - (F_CPU / per_sec / 64);
if (time_cnt <= 3000) // 3초동안
{
if (dir == 0) // CW
{
cbi(PORTF,1);
sbi(PORTF,0);
PORTA = 0b11111111;
}
else if(dir == 1) // 정지
{
cbi(PORTF,0);
cbi(PORTF,1);
PORTA = 0b11111100;
pulse_cnt = 0;
rpm = 0;
}
else if(dir == 2) // CCW
{
cbi(PORTF,0);
sbi(PORTF,1);
PORTA = 0b11110000;
}
else if(dir == 3) // 정지
{
cbi(PORTF,0);
cbi(PORTF,1);
PORTA = 0b11000000;
pulse_cnt = 0;
rpm = 0;
}
}
else // time_cnt가 3000보다 커지면
{
time_cnt = 0; // time_cnt 0으로 초기화
dir++; // dir값 +1
dir %= 4; // dir값 0~3사이만 나오게
}
}
외부 인터럽트와 타이머 카운터0 오버플로우 인터럽트를 사용해주었다.
int main(void)
{
init_port(); // 포트 초기 설정
init_int0_reg(); // INT0 외부 인터럽트 레지스터 초기 설정
init_tc0_reg(); // 타이머카운터0 레지스터 초기설정
set_dutyratio(50.0); // 듀티비 50으로 설정
lcd_init(); // LCD 초기화
cursor_off(); // LCD 커서 안보이게
sei(); // SREG 7번비트 1로 세트
while (1)
{
while(EIFR & (1 << INTF0) == 0); // rising edge 발생 -> ISR 실행
sprintf(str_pulse_cnt, "PULSE : %d", pulse_cnt);
rpm = (60 * (float)pulse_cnt) / (3 * 13 * 18);
// rpm = (60 * 펄스 수) / (3초 * PPR(!3) * 기어비(18))
sprintf(str_rpm, "RPM : %.2f", rpm);
//lcd 출력
lcd_gotoxy(0, 1); lcd_puts(str_pulse_cnt);
lcd_gotoxy(0, 0); lcd_puts(str_rpm);
_delay_ms(200);
lcd_clear();
}
}
🧷 결과
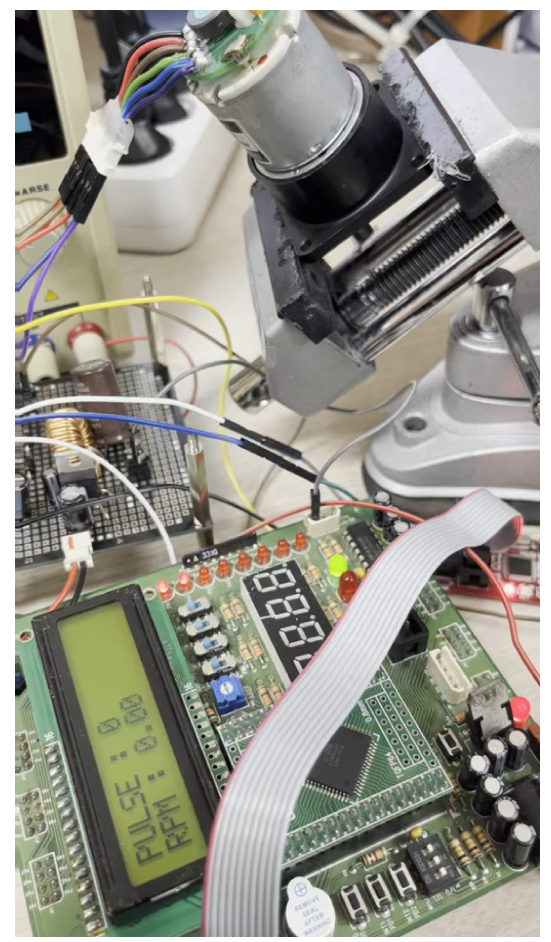
사진처럼 LCD에 PULSE 수와 RPM값이 뜨고, 듀티비를 50으로 설정해주어서 RPM이 대략 172.22정도가 나오는 PPT에 첨부해놓은 동영상이 있었는데, 영상 재생을 하니깐 검정화면밖에 안 뜬다...
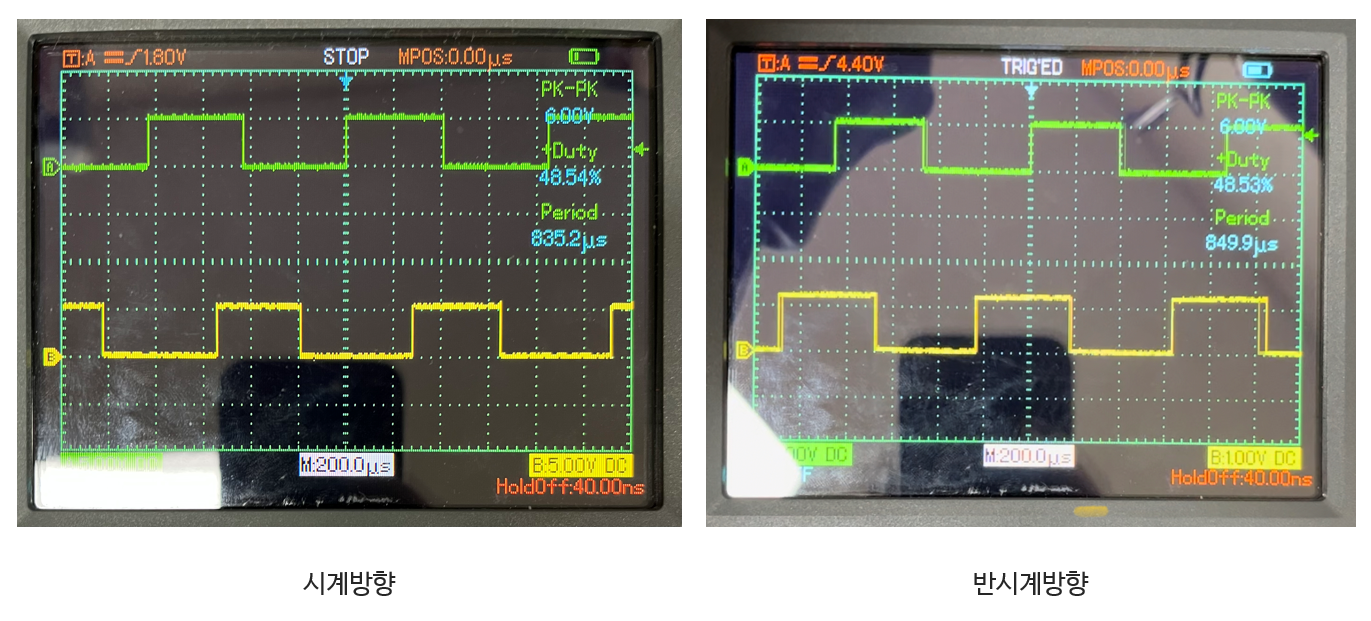
시계방향으로 돌 때와 반시계방향으로 돌 때 오실로스코프로 출력한 파형이다.
A상과 B상이 각각 반대임을 확인할 수 있다.
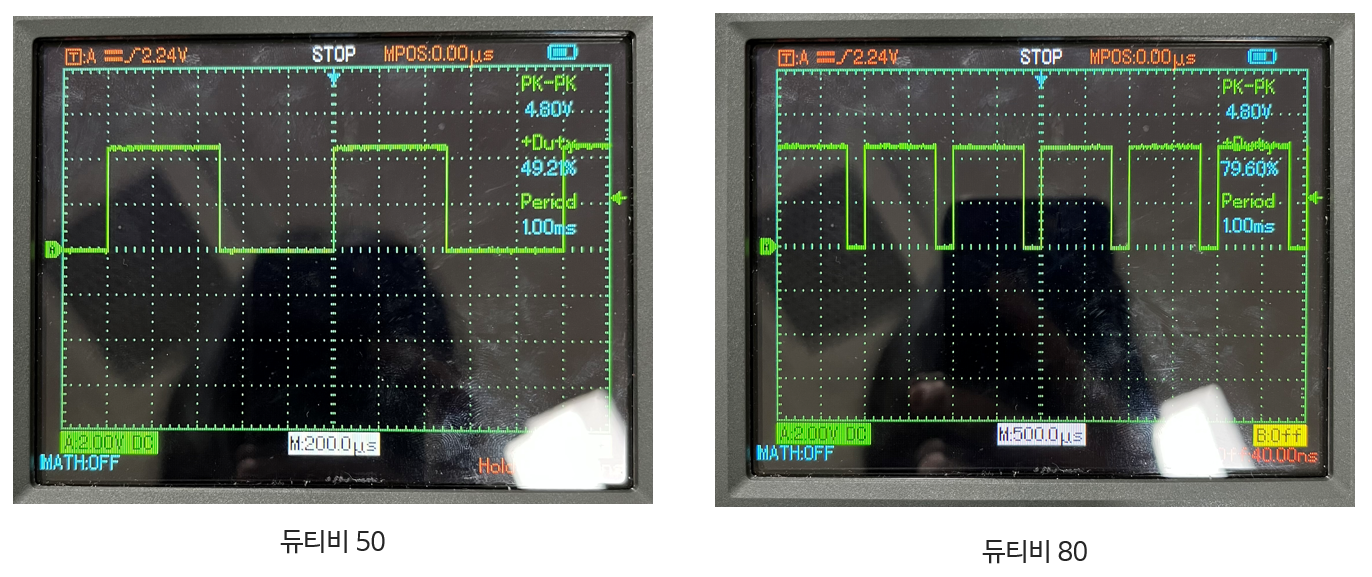
듀티비 50으로 설정했을 때와 듀티비 80으로 설정했을 때의 파형이다.
🤣참고사진
https://m.blog.naver.com/PostView.naver?isHttpsRedirect=true&blogId=ina_om&logNo=220822692729
