※ 본 포스팅은 H-모빌리티 클래스를 통한 개인 기록용 스터디이며, 구글링 및 수업 내용 복습을 바탕으로 지속적으로 업데이트를 할 계획입니다.
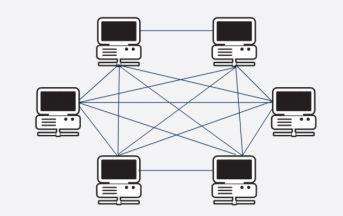
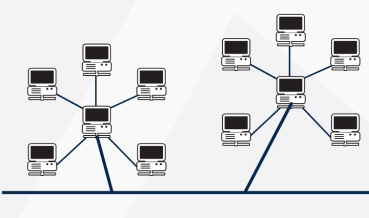
차량 내 네트워크를 이루는 토폴로지의 종류
- Mesh Topology
- Ring Topology
- Star Topology
- Tree Topology
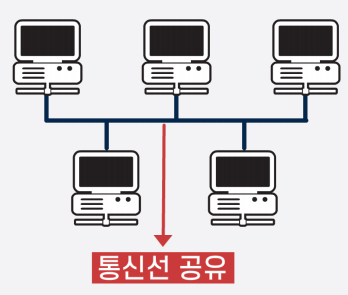
- Bus Topology
- 차량용 네트워크는 일반적으로 버스 구조 가짐
- 차량 내 개별 제어기의 역할에 따라 도메인 기준으로 그룹화하여 네트워크를 분리하는 것이 일반적
- 통신선 사용 시 장점
- 제어기의 추가/제거 간편 + 차량 내 효율적 정보 공유 + 새로운 기능 적용 용이
- 제어기 증가 시 단점
- 고장 발생지점 탐색에 어려움 + 고장 발생 확률 증가 + 원가 및 중량 증가


- 차량용 네트워크 구조
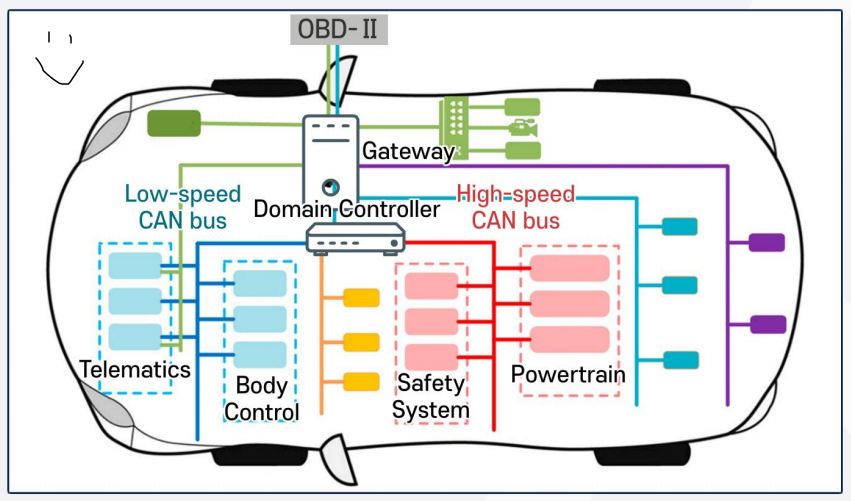
- CAN, LIN, Ethernet, FlexRay
- 서로 데이터 공유 X -> Gateway가 이걸 가능하게 함
CAN(Controller Area Network)
- 1980년대 BOSCH에서 차량용으로 개발, 오늘날 가장 많이 사용
- CAN, FlexRay: 제어 명령 및 진단 통신에 주로 사용
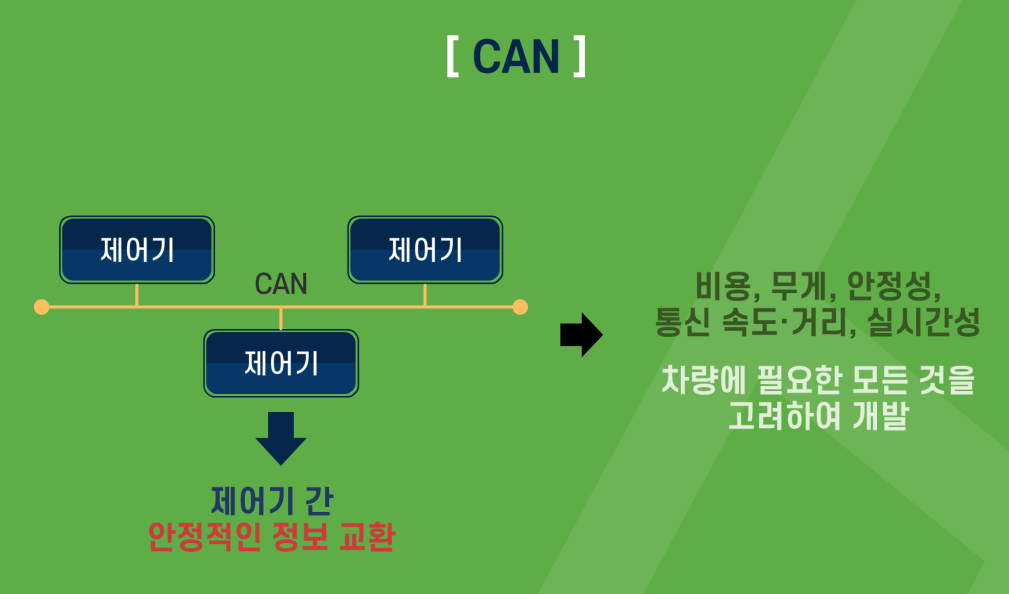
- CAN 통신 특징
- Multi-master: 네트워크로 구성된 제어기는 원하는 시점에 정보 송수신 가능
- Twisted pair(2-wire): 두 개의 통신선으로 네트워크 구성
- 기존 통신보다 단순한 선로 구성 가능
- Bus Topology: 제어기의 추가/제거 용이해, 설계자 입장에서 편리함
- CAN 통신의 관련 국제 표준
- SAE J2284, SAE J1939, ISO 11898(데이터링크 계층과 물리 계층으로 구분됨)
CAN 통신 - 물리 계층(Physical Layer)
- 통신이 어떤 신호를 통해 전달되는지에 관한 물리 계층의 스펙
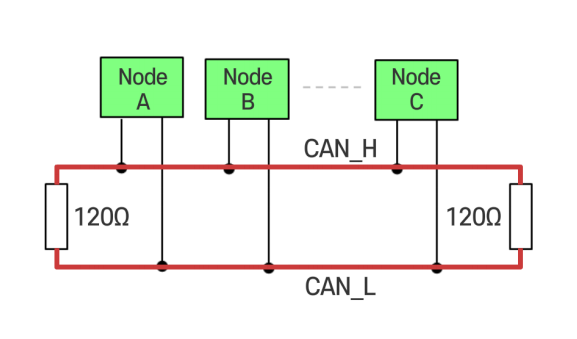
- 네트워크 구성
- 통신선의 길이
- 메인 선 ~ 제어기까지의 거리
- Twisted wire를 이용한 통신선 공유
- 통신 속도 조절 가능
- 1000kbit/s의 Data rate 기준 30 ~ 40m의 통신선 필요, Nominal Bit-Time: 1ms
- 반사파 현상 제거를 위해 양 끝단에 종단 저항 설치
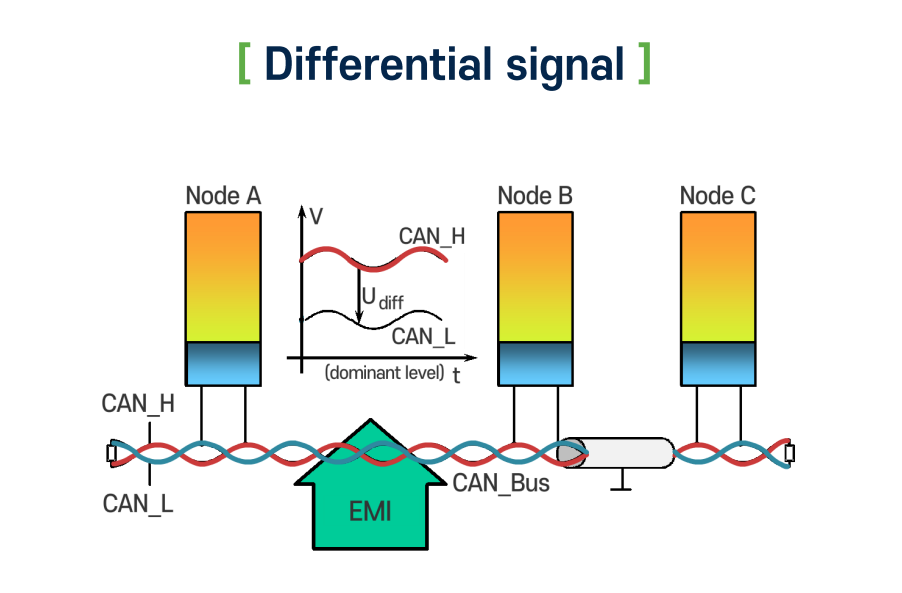
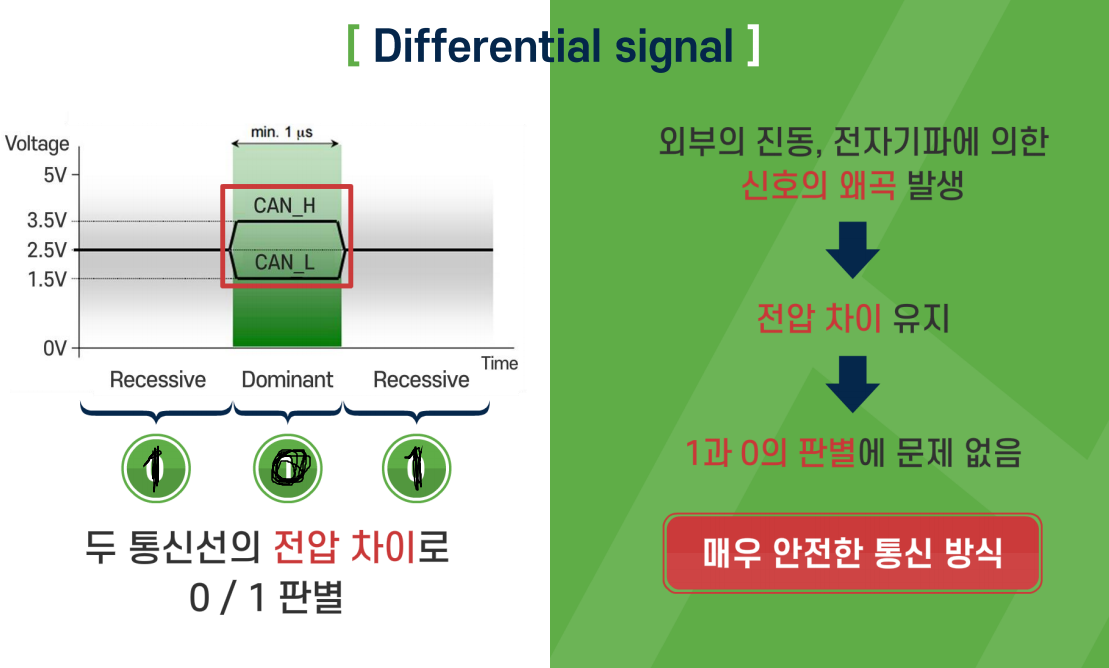
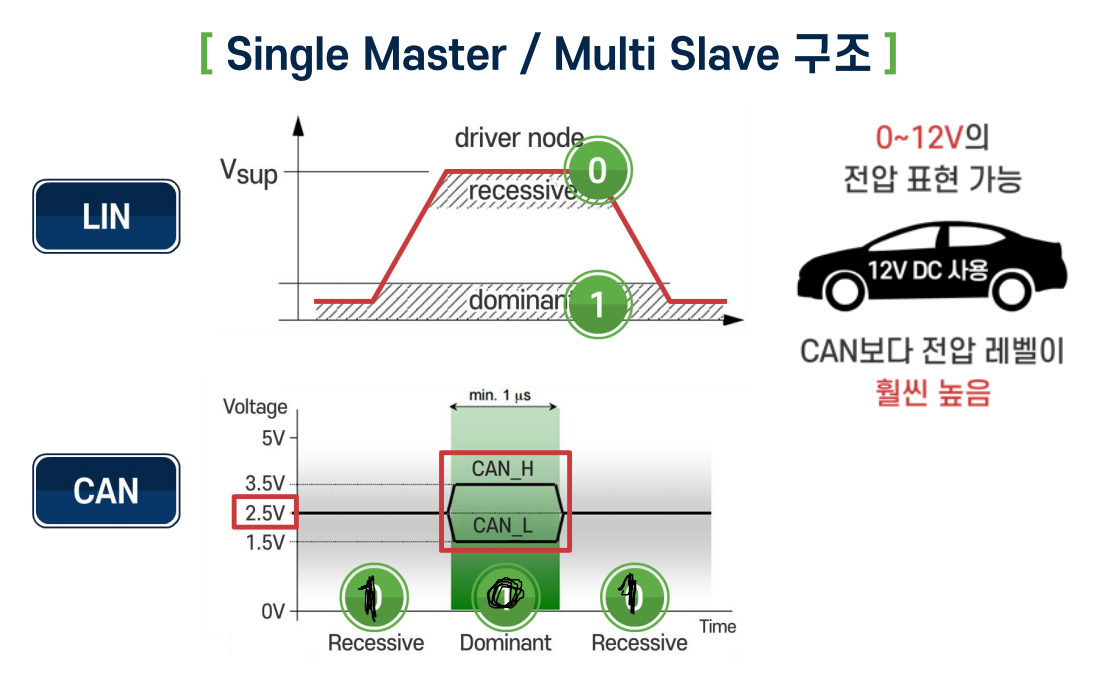
물리 계층의 동작 원리
- Differential signal: 서로 다른 전압을 가할 때 전압 차이가 0인지 1인지 판별
- 전압 차이가 0이면: Dominant라 부르고,
- 전압 차이가 1이면: Recessive라 부른다.
- 두 통신선의 전압 차이로 0 또는 1 판별
- 두 신호가 충돌하면 0이 무조건 이긴다!
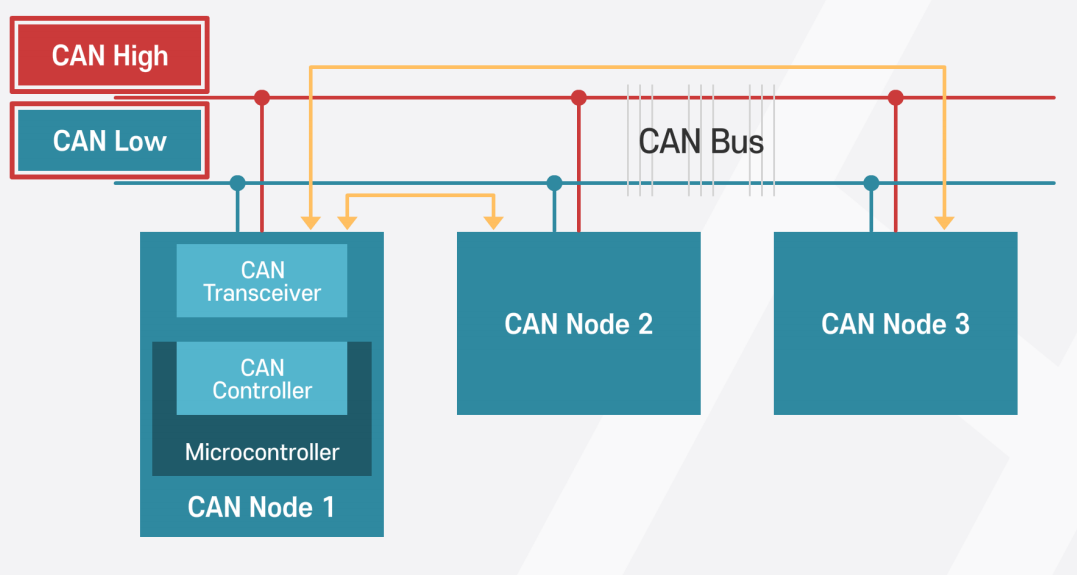
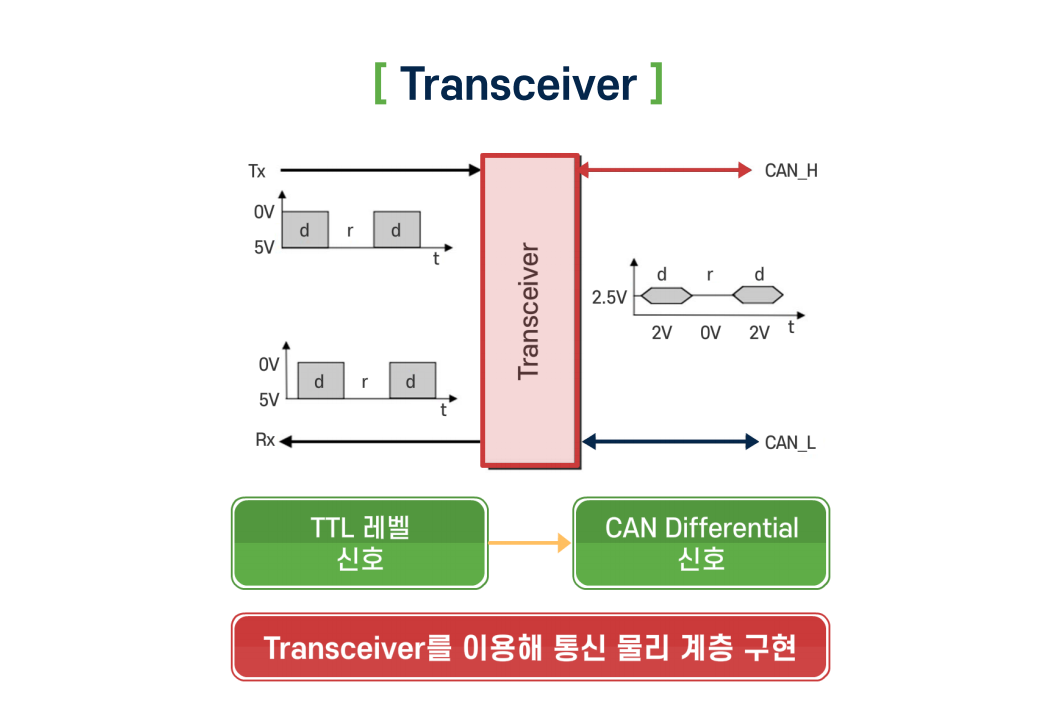
- Transceiver
CAN 통신 - 데이터 링크 계층(Data Link Layer)
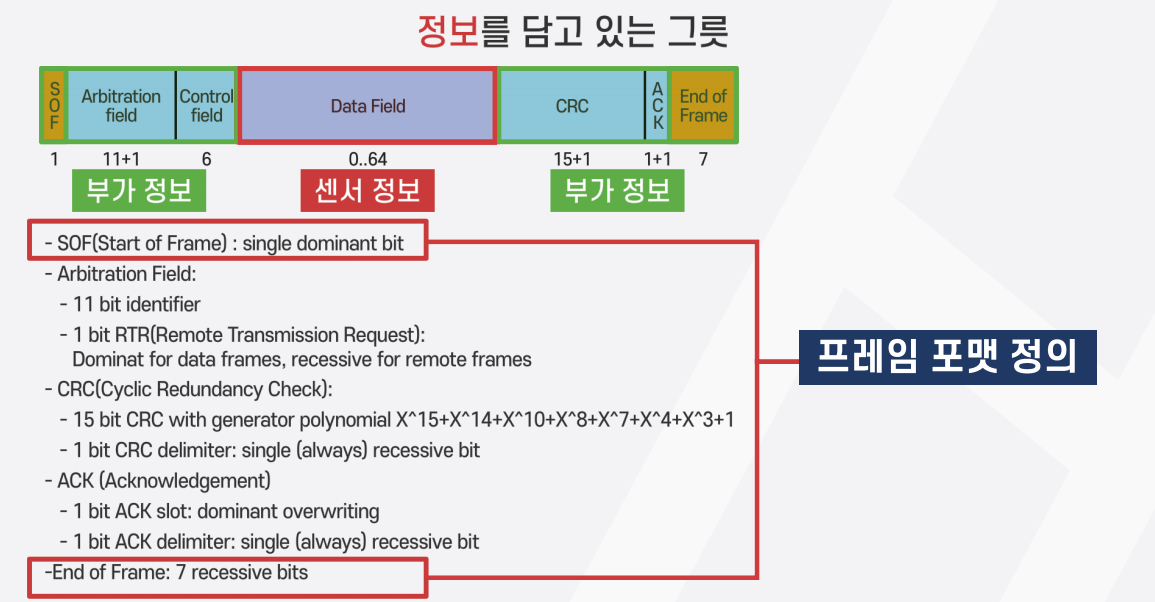
- 정보를 담고 있는 그릇
- 부가 정보를 통해 안정적으로 데이터 전달
- SOF(Start of Frame): 메시지 시작
- End of Frame: 메시지 끝
- Arbitration Field: 메시지를 구분할 수 있는 인덱스가 포함됨
- CRC(Cyclic Redundancy Check): 수신 확인으로 데이터 안정성 보장
- ACK(Acknowledgement): 정확한 데이터 수신 시 발신자에게 전달
- 발신자와 수신자의 정보 공유
- Arbitration Field: 메시지 발송 순서 정하는 용도로 사용
- Message ID: 숫자로 표현될 수 있는 정보
- 메시지 간 우선 순위 경쟁에 활용: 번호가 낮을수록 우선 순위가 높음
- 순차적 메시지 발송 필요: 3개의 제어기에 대한 메시지 동시 전송 불가
- 안전에 민감한 경우: 낮은 번호대 사용으로 우선 순위 결정
- 안전에 민감하지 않은 경우: 높은 번호대 사용
- Message ID에 따라 Arbitration Field에서 중재를 통해 전송 순서 관리
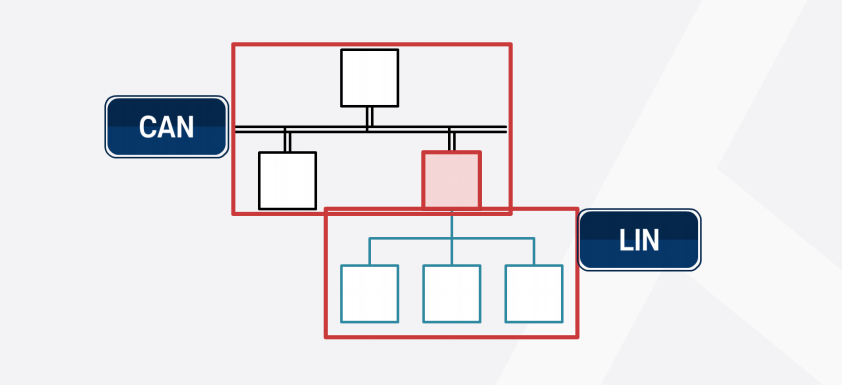
LIN(Local Interconnect Network)
- 서브 네트워크 방식: 간단한 기능 제어에 사용
- 어떤 하나의 제어기의 서브 네트워크로 연결되는 구조
- Single wire 기반 통신으로, 최대 속도는 20Kbps (CAN보다 낮음)
- 간단한 기능의 ECU 제어용 로컬 네트워크 [노드: 16개 이하, 메시지 64개 이하]
- 예: 센서, 엑추에이터, 스위치
- 장점: CAN보다 개발 및 재료 비용이 저렴
- 단점: CAN보다 느린 속도, 적은 기능
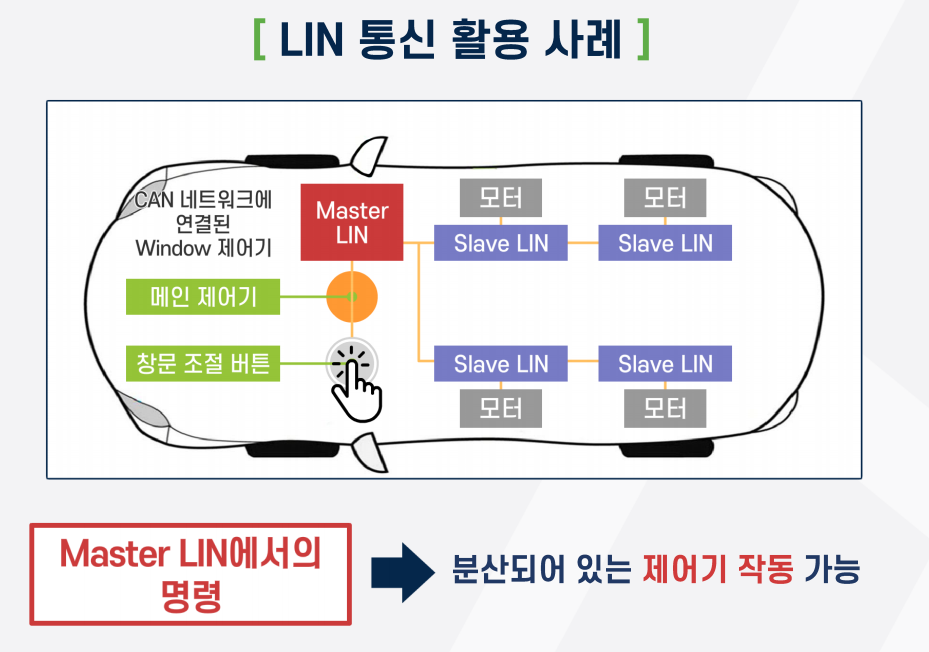
- Single master, Multi Slave 구조
- Time-triggered Schedule Communication: 지정한 시간에 메시지 전달하는 방식
- Single wire 방식에 적합
- Master의 스케줄에 따른 Slave의 동작
- 일반적인 범용에서, SCI(Serial Communication Interface) 통신 모듈 이용
- Transceiver Chip: 교체 시 쉽게 LIN 통신 가능
- CAN_H와 CAN_L의 전압 차로 표현
- 메시지 구분 용도는 CAN과 같다.
- Time-triggered Schedule Communication: 지정한 시간에 메시지 전달하는 방식
- LIN 통신의 활용 사례
Ethernet
- 멀티미디어 및 ADAS에 주로 사용
- 24.05.13)참조해서 정리 https://blog.naver.com/techref/222271304073
FlexRay
- CAN, FlexRay: 제어 명령 및 진단 통신에 주로 사용
https://m.blog.naver.com/suresofttech/220793847337
https://m.blog.naver.com/roboholic84/221743487231

🚗 Autonomous Vehicle 🖥️ Study Alone