module uart_rx
#(
parameter IDLE_ST = 3'b000,
parameter START_ST = 3'b001,
parameter DATA_ST = 3'b010,
parameter STOP_ST = 3'b011
)
(
input clk,
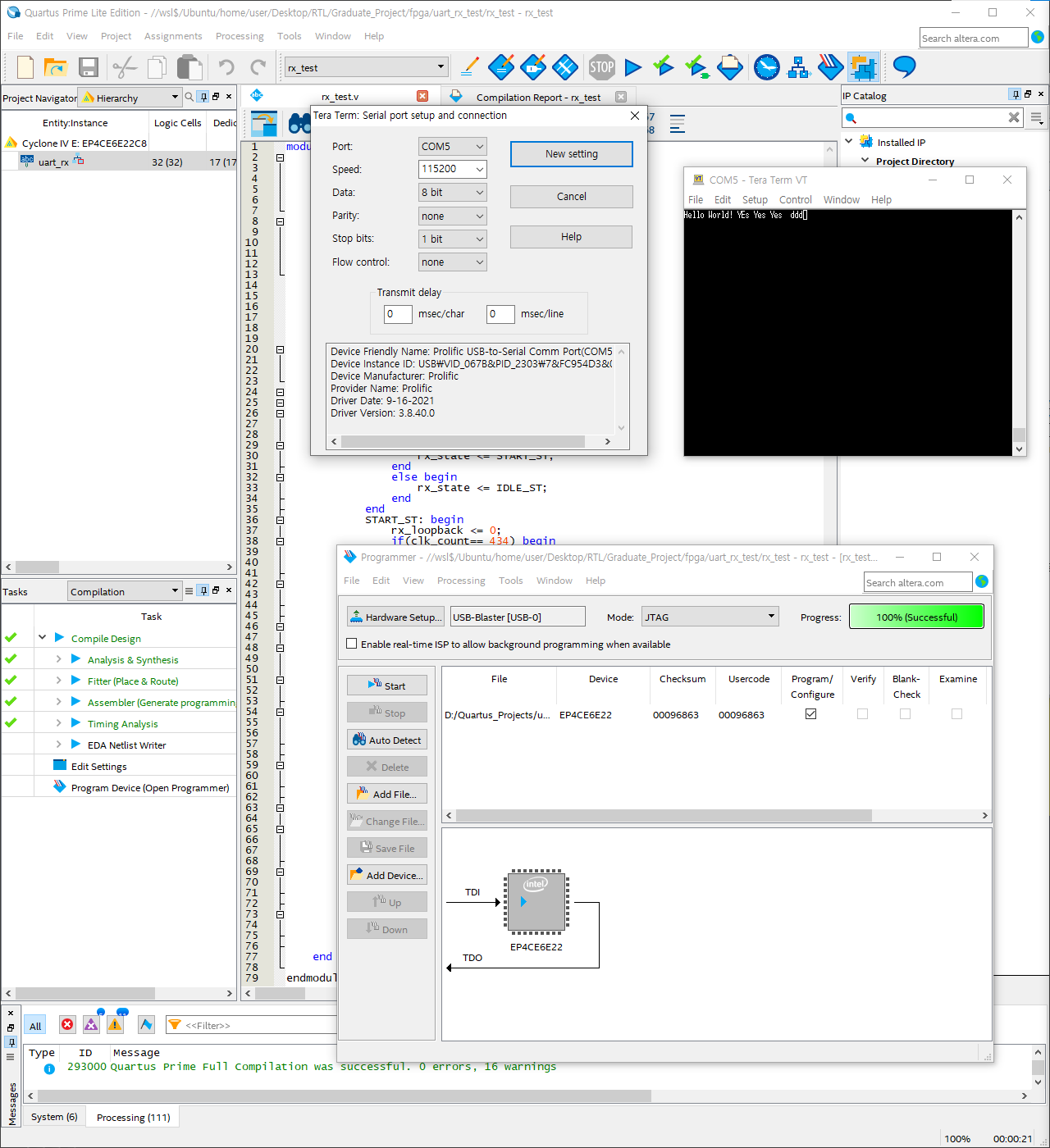
input rx_input_data,
output reg rx_loopback
);
reg [3:0] rx_state = 0;
reg [8:0] clk_count = 0;
reg rx_data = 1'b1;
reg [7:0] rx_result_data = 0;
reg [2:0] rx_index = 0;
always @(*) begin
rx_data <= rx_input_data;
end
always @(posedge clk) begin
case(rx_state)
IDLE_ST: begin
rx_loopback <= 1;
clk_count <= 0;
if(rx_data == 1'b0) begin
rx_state <= START_ST;
end
else begin
rx_state <= IDLE_ST;
end
end
START_ST: begin
rx_loopback <= 0;
if(clk_count== 434) begin
clk_count <= 0;
rx_state <= DATA_ST;
end
else begin
clk_count <= clk_count + 1;
end
end
DATA_ST: begin
rx_loopback <= rx_data;
if(clk_count == 434) begin
clk_count <= 0;
rx_result_data[rx_index] <= rx_data;
if(rx_index < 7) begin
rx_index <= rx_index + 1;
end
else begin
rx_index <= 0;
rx_state <= STOP_ST;
end
end
else begin
clk_count <= clk_count + 1;
end
end
STOP_ST: begin
rx_loopback <= 1'b1;
if(clk_count == 434) begin
clk_count <= 0;
rx_state <= IDLE_ST;
end
else begin
clk_count <= clk_count + 1;
end
end
default: begin
rx_state <= IDLE_ST;
end
endcase
end
endmodule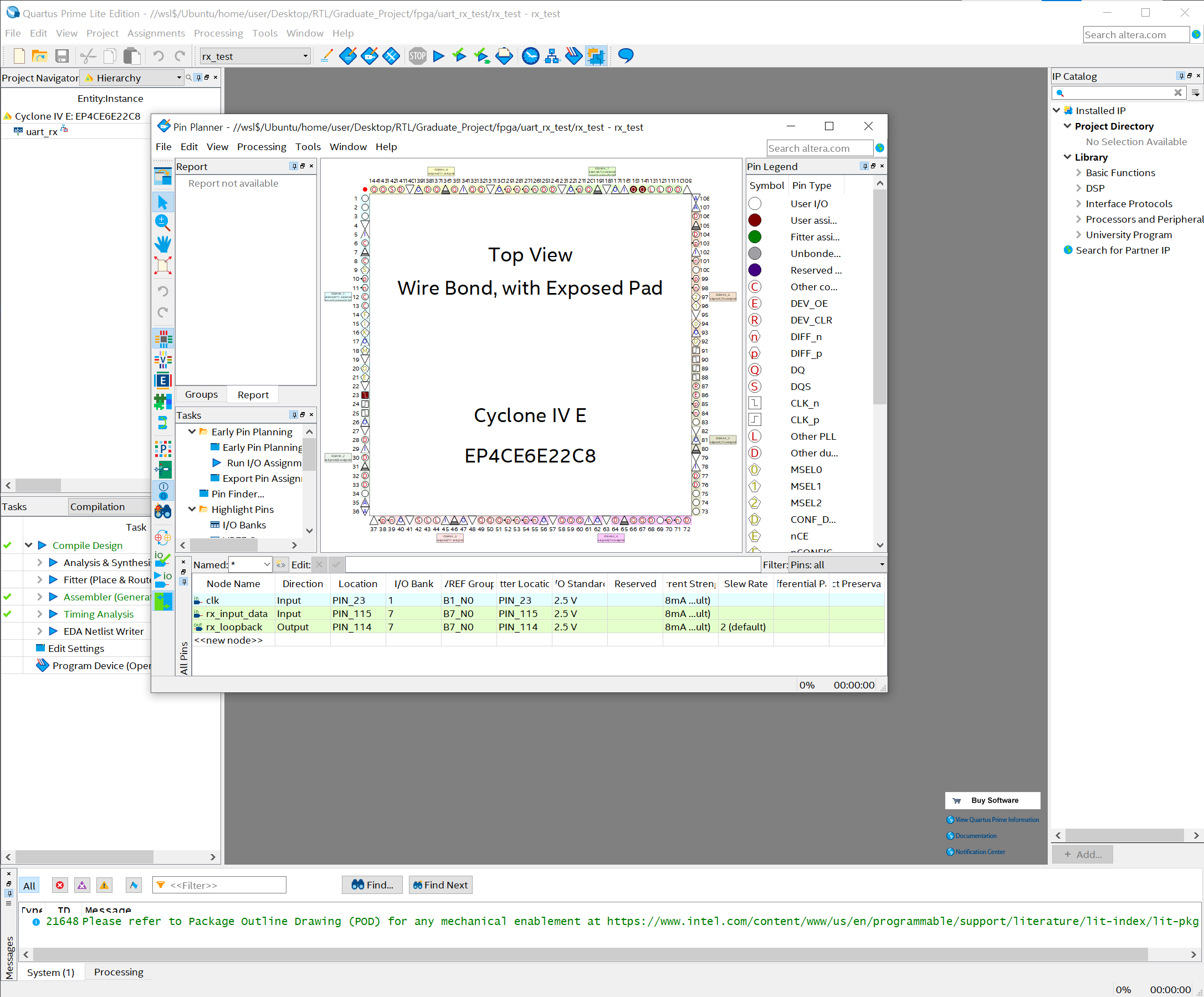

HW SW 둘다 공부하는 혼종의 넋두리 블로그 / SKKU SSE 17 / SWM 11th