Chapter 01 Computer Vision & Nueral Network
신경망 시작하기
인공 신경망(NN or ANN)은 정보를 처리하는 일, 일반적인 패턴을 인식하거나 새로운 패턴을 탐지하는 일, 복잡한 절차를 근접시키는 일에 탁월한 강력한 머신러닝의 도구입니다
뉴런 복제하기
초기의 인공신경망은 사람의 뉴런을 형상화 하려했습니다. 아래 그림과 같이 인공 신경망은 주어진 입력에 대해, 주어진 가중치를 이용하여 결과값을 도출합니다
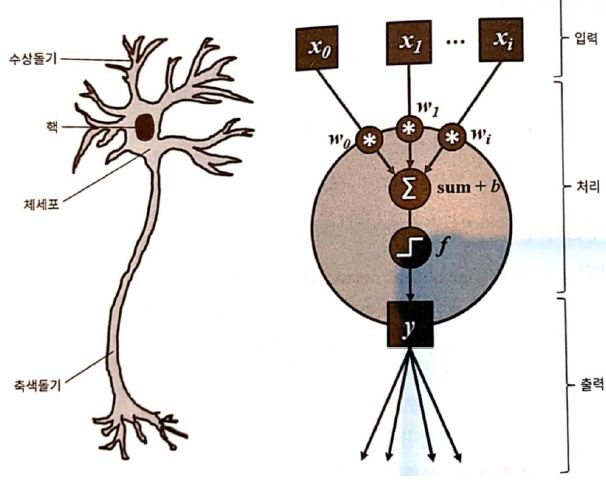
위에서 일어나는 일련의 과정을 다음과 같이 표현할 수 있습니다
H(x) = WX + b
x = (x0, x1) w(transpose) = (w0, w1)
가중치 백터와 입력 백터를 내적하여 결과값 H(X)를 얻을 수 있습니다. 이제 마지막으로 뉴런의 출력을 얻기 위해 활성화 함수(activation function)을 통과시키면 됩니다.
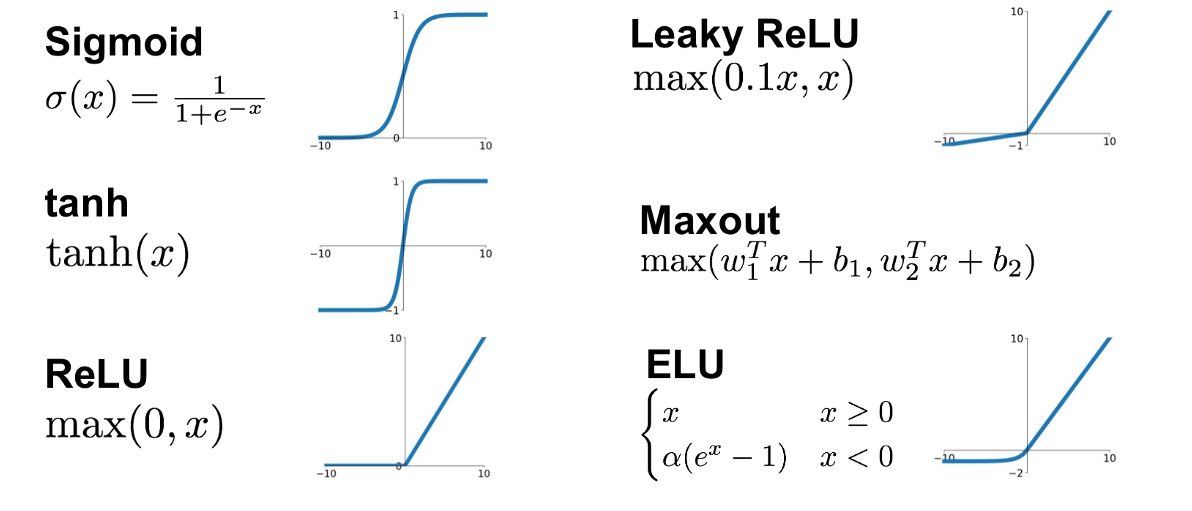
활성화 함수의 종류는 아래와 같이 있습니다.
- Step function
- Sigmoid function
- Hyperbolic tangent
- ReLU
- ELU
구현
이제 인공 뉴런의 값을 위와 같이 얻었으면 다른 인공 뉴런으로 전달해 줘야 합니다. 이 과정을 forward라 부릅니다. 아래와 같이 numpy를 이용하여 간단히 구현할 수 있습니다.
import numpy as np
class Neuron(object):
'''simple forward Neuron
Args(입력):
num_inputs(int) : 입력 벡터 크기 / 입력 값 개수
activation_fn : 사용할 활성화 함수
Attributes(속성):
W (ndarray) : 각 입력에 대한 가중치
b (float) : Bias. 가중합에 더해진다
activation_fn (callable) : 활성화 함수
'''
# 랜덤값으로 가중치 벡터와 bias를 초기화 함
def __init__(self, num_inputs, activation_fn):
super().__init__()
self.W = np.random.rand(num_inputs) # 주어진 특징 벡터 차원과 맞게 가중치를 0~1사이로 random하게 초기화한다
self.b = np.random.rand(1) # bias 초기화
self.activation_fn = activation_fn
# 뉴런을 통해 입력 신호를 전달
def forward(self, x):
z = np.dot(x, self.W) + self.b # Z = WX + b
return self.activation_fn(z) # 활성화 함수를 통과시킴
# 결과가 같게 나오기 위해서 random seed를 고정한다
np.random.seed(42)
# 3개의 random 입력을 행으로 받을 수 있는 배열 (shape = (1,3))
x = np.random.rand(3).reshape(1,3)
print(x) # 임의로 만든 입력 벡터 출력
# Step function 정의
step_fn = lambda y: 0 if y<=0 else 1 # 0을 기준으로 크면 1 작으면 0의 값을 가진다
# Perceptron을 instance화 시킨다
perceptron = Neuron(num_inputs=x.size, activation_fn=step_fn) # 계단함수를 활성화 함수로 사용
out = perceptron.forward(x) # 뉴련의 출력 값
print(out) 뉴런을 계층화하기
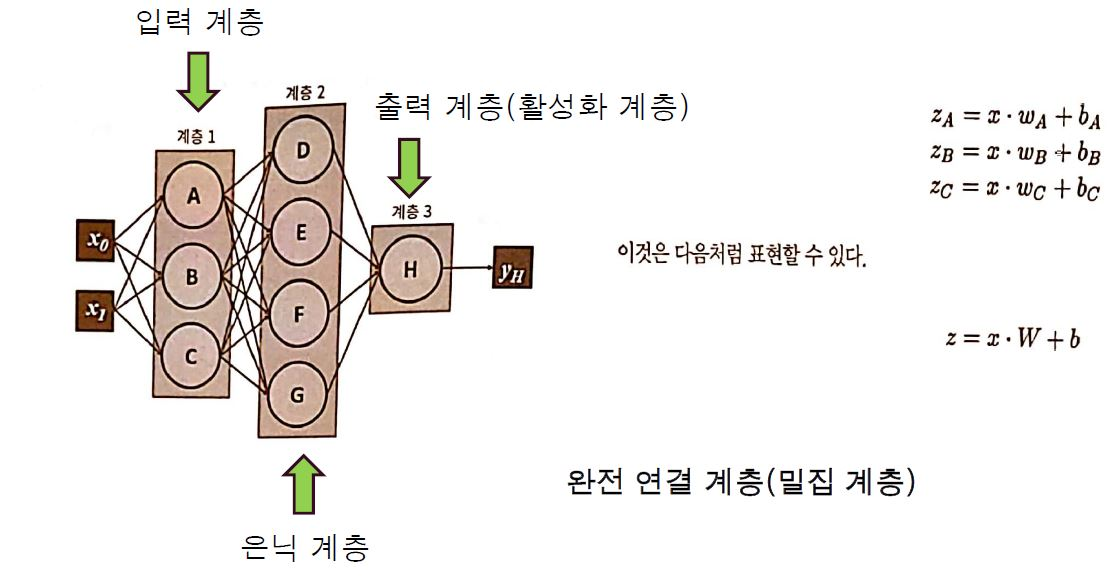
일반적으로 Neural network는 동일한 입력을 받고 동일한 연산을 하는 뉴런의 집합으로 구성됩니다.
아래의 그림에서 network는 1개의 입력 계층과 출력 계층. 그리고 3개의 은닉 계층(hidden layer)을 가지고 있습니다.
입력 계층과 1번째 은닉 계층이 연결되어 있고 계속해서 출력 계층까지 뉴런들이 연결되어 있는 것을 볼 수 있습니다. 특히 아래의 은닉 계층은 각 뉴런이 이전 계층에서 나온 모든 값에 연결되어 있는 것을 확인할 수 있고, 이를 Fully-connected layer 혹은 dense-layer라 합니다
multi layer의 구현
단일 뉴런처럼 multi-layer도 구현할 수 있습니다
import numpy as np
class FullyConnectedLayer(object):
'''simple forward Neuron
Args(입력):
num_inputs(int) : 입력 벡터 크기 / 입력 값 갯수
layer size(int) : 출력 벡터의 크기 / 뉴런의 갯수
activation_fn : 사용할 활성화 함수
Attributes(속성):
W (ndarray) : 각 입력에 대한 가중치
b (float) : Bias. 가중합에 더해진다
activation_fn (callable) : 활성화 함수
'''
# 랜덤값으로 가중치 벡터와 bias를 초기화 함
def __init__(self, num_inputs, layer_size, activation_fn):
super().__init__()
self.W = np.random.standard_normal(num_inputs) # 주어진 특징 벡터 차원과 맞게 가중치를 정규 분포를 이용하여 초기화한다
self.b = np.random.standard_normal(layer_size) # bias 초기화
self.size = layer_size # network속 뉴런의 갯수
self.activation_fn = activation_fn
# 뉴런을 통해 입력 신호를 전달
def forward(self, x):
z = np.dot(x, self.W) + self.b # Z = WX + b
return self.activation_fn(z) # 활성화 함수를 통과시킴FullyConnectLayer는 class Neuron 일부 변수의 차원을 조정하였습니다.
아래는 FCLayer를 instance화 하는 과정입니다
# 결과가 같게 나오기 위해서 random seed를 고정한다
np.random.seed(42)
# 2개의 random 입력을 행으로 받을 수 있는 배열 (shape = (1,2))
# -1~1 사이의 임의의 실수값으로 초기화한다
x1 = np.random.uniform(-1, 1, 2).reshape(1,2)
x2 = np.random.uniform(-1, 1, 2).reshape(1,2)
# 임의로 만든 입력 벡터 출력
print('x1:', x1)
print('x2:', x2)
# ReLU함수 정의
relu_fn = lambda y: np.maximum(y, 0) # 0보다 작은 값은 0, 큰 경우는 y = x이다
# instance화
layer = FullyConnectedLayer(2, 3, relu_fn)
# 각 input(x1, x2)에 대한 출력값 출력
out1 = layer.forward(x1)
print('out1:',out1)
out2 = layer.forward(x2)
print('out2:',out2)다음과 같은 과정을 통해서 x1, x2(2차원)에 대한 FCLayer의 출력값(3차원)을 얻을 수 있습니다
신경망 훈련시키기
신경망을 훈련시키는 방법으로는 크게 3가지 방법이 있습니다
1) 지도학습 (supervised Learning)
: 가장 보편적이며 이해하기 쉽습니다. 예측된 레이블(결과)와 실제 레이블(정답)을 비교하여, 얼마나 잘못하였는지 평가(=손실)할 수 있습니다. 이 손실(Cost)를 줄이기 위해서 Network의 매개변수(가중치, bias)를 조정하고, 네트워크의 accuracy가 임계값에 도다를때까지, 위의 과정을 반복합니다
2) 비지도학습 (Unsupervised Learning)
: 지도학습과는 달리 label(실제 정답)이 주어지지 않습니다. 즉 신경망이 스스로 분류한 결과를 우리는 얻게 됩니다. 비지도학습은 주로 clustering(군집화)나 차원 축소(dimension reduction)에 많이 사용됩니다
3) 강화학습 (Reinforced Learning)
: 강화 학습은 상호 작용에 기반한 학습입니다. 즉, 일단 해보면서 개선해나가는 것이 핵심 아이디어입니다. 더 많은 보상을 얻을 수 있게 만드는 것을 통해, 알아서 똑똑해지는 기계를 만들 수 있습니다. 자세한 내용은 기계학습에서 참고하세요!
네트워크 훈련
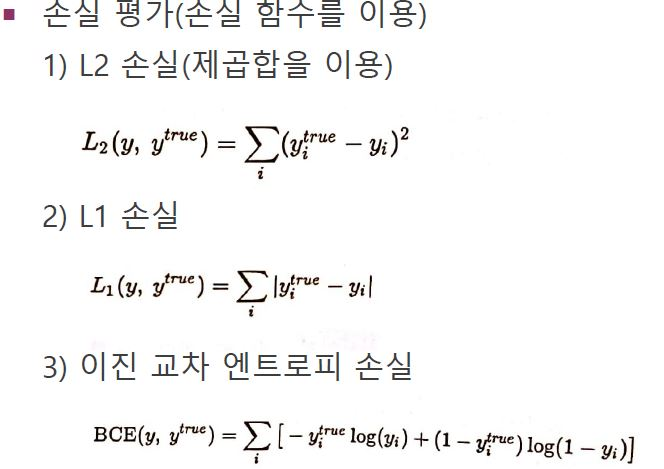
Cost function (비용 함수)
: 비용 함수의 목표는 현재의 가중치로 얼마나 잘 동작하는지 평가하는 것입니다. 우리는 최적해를 찾기 위해서 주로 비용함수를 이용합니다. Cost가 가장 낮은 점이 최적해가 됩니다.
우리가 많이 사용하는 cost function으로는 MSE, Binary cross-entropy 등이 있습니다.
손실함수의 가장 중요한 점은 항상 convex(아래로 볼록)해야 한다는 점입니다
이 이유는 뒤에서 다시 설명드리겠습니다
Back propagation
어떻게 하면 network 매개변수를 업데이트 해 손실을 최소화할 수 있을까요?
흔히 사용되는 방법은 바로 Gradient Descent(경사 하강법)입니다. 즉, cost fucnntion의 gradient(미분값)을 이용하는 것입니다. cost function의 경사를 따라 내려가면 우리는 최적해를 찾을 수 있습니다. 이것이 바로 gradient descent입니다!
아래 그림을 보면, 현재 (1)지점에서 경사를 따라서 계속 내려가다 보면 최저점(Global minimum)에 도달하는 것을 볼 수 있습니다. 이 지점이 최적해가 되겠지요?
이전에 cost function의 주의점으로는 항상 convex해야 한다고 설명드렸습니다. 이 이유로는 아래 그림에서 극소값이 2개가 존재하는데, 만약 아래와 달리 1번째 극솟값보다 2번째 극솟값이 더 작으면, 신경망은 1번째 점을 최적해로 판단하고(실제는 2번째가 최적해) 학습을 끝내는 문제가 발생합니다!
즉, Gloabal minimum에서 학습이 종료되지 않고, local minimum(지역 최소점)에서 학습이 종료된다는 문제가 발생하므로, 항상 Convex하여야 이러한 문제가 발생하지 않습니다!
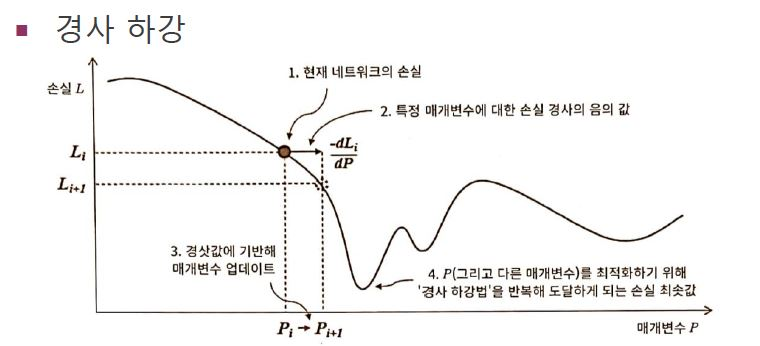
그럼 gradient를 통해서 어떻게 network의 매개변수 값을 조정할까요?
바로 가중치 값을 (학습률) X (cost function의 Gradient) 한 값으로 빼주면 됩니다.
학습률(learning rate)은 사용자가 정해줘야 하며, 이 값은 경험에 의해 알아야 합니다. 학습을 시키면서 learning rate를 조절하면서 모델의 성능을 개선할 수 있습니다. 만약 학습률이 너무 크면, 네트워크가 빠르게 학습하지만 조정폭이 너무 커서 최적해를 놓칠 수 있습니다. 반대로 너무 작으면, 학습은 너무 천천히 하게 됩니다. 따라서 적당한 값을 모델을 돌려보면서 찾습니다. 통상적으로 0.01을 많이 하며, 0.1, 1, ...등으로 늘리거나 0.001, ...등으로 줄일 수 있습니다
Network가 학습하는 과정을 다음과 같이 summary 해보겠습니다!
1. n개의 훈련 데이터를 network에 제공한다
2. chain-rule을 사용하여 cost를 계산하고, backpropagation을 통하여 gradient값을 얻는다
3. 해당 미분값을 이용하여 매개변수를 업데이트한다
4. 전체 훈련집합에 대해 1~3단계를 반복한다
5. 조건을 만족할때까지 1~4단계를 반복한다
전체 훈련 집합을 1회 반복하는 것을 epoch이라 합니다.
전체 훈련 집합을 쪼개어서 학습하는 것을 mini-batch라 하며, divide&conquer 개념이라 생각하면 됩니다!
신경망에 분류하는 방법 가르치기
앞에서는 forward 기능만 구현하였습니다. 이제 backPropagation과 optimization method를 추가해봅시다!
class FullyConnectedLayer(object):
# 기존의 코드와 거의 유사
def __init__(self, num_inputs, layer_size, activation_fn, d_activation_fn):
super().__init__()
self.W = np.random.standard_normal((num_inputs, layer_size))
self.b = np.random.standard_normal(layer_size)
self.size = layer_size
self.activation = activation_fn
self.d_activation_fn = d_activation_fn # 활성화 함수의 도함수
self.x, self.y, self.dL_dW, self.dL_db = 0, 0, 0, 0 # 스토리지 속성
# 뉴런을 통해 입력 신호를 전달
def forward(self, x):
z = np.dot(x, self.W) + self.b
self.y = self.activation(z)
self.x = x # 역전파를 위해 값을 저장
return self.y
# 손실을 역전파 -> chain rule을 활용한다
def backward(self, dL_dy):
# chain rule
dy_dz = self.d_activation_fn(self.y) # f'
dL_dz = (dL_dy * dy_dz) # dL/dz = dL/dy * dy/dz = l'_{k+1} * f'
dz_dw = self.x.T
dz_dx = self.W.T
dz_db = np.ones(dL_dy.shape[0]) # dz/db = d(W.x + b)/db = 0 + db/db = "ones"-vector
# 계층 매개변수 dL, w, r, t를 계산하고 저장한다
self.dL_dW = np.dot(dz_dw, dL_dz)
self.dL_db = np.dot(dz_db, dL_dz)
# 미분값 w,r,t와 이전 계층의 x를 계산:
dL_dx = np.dot(dL_dz, dz_dx)
return dL_dx
# 계층의 매개변수 w,r,t 미분값을 최적화
def optimize(self, lr): # lr: learning rate
self.W -= lr * self.dL_dW
self.b -= lr * self.dL_db# 시그모이드 도함수
def derivated_sigmoid(y):
return y * (1-y)
# L2 loss 함수
def loss_L2(pred, target):
return np.sum(np.square(pred-target)) / pred.shape[0]
# L2 loss 도함수
def derivated_loss_L2(pred, target):
return 2 * (pred-target)
class SimpleNetwork(object):
def __init__(self, num_inputs, num_outputs, hidden_layers_size = (64,32), activation_function=sigmoid, derivated_activation_function=derivated_sigmoid,
loss_fn=loss_L2, d_loss_fn = derivated_loss_L2):
super().__init__()
sizes = [num_inputs, *hidden_layers_size, num_outputs]
self.layers = [
FullyConnectedLayer(sizes[i], sizes[i+1], activation_function, derivated_activation_function) for i in range(len(sizes) - 1)
]
self.loss_fn, self.d_loss_fn = loss_fn, d_loss_fn
def forward(self, x):
for layer in self.layers:
x = layer.forward(x)
return x
# 마지막 계층에서 처음 계층까지 손실 미분값을 역전파
def backward(self, dL_dy):
for layer in reversed(self.layers):
dL_dy = layer.backward(dL_dy)
return dL_dy
# 저장된 gradient값에 따라 매개변수 최적화
def optimize(self, lr):
for layer in self.layers:
layer.optimize(lr)
def predict(self, x):
estimations = self.forward(x)
best_class = np.argmax(estimations)
return best_class
def evaluate(self, X_test, y_test):
num_corrects = 0
for i in range(len(X_test)):
if self.predict(X_test[i]) == y_test[i]:
num_corrects += 1
return num_corrects / len(X_test)
def train(self, X_train, y_train, X_val = None, y_val = None, batch_size=32, num_epochs=5, learning_rate=1e-3 ):
# 제공된 데이터셋에서 네트워크를 훈련하고 평가
num_batches_per_epoch = len(X_train) ## // Batch size
loss = []
for i in range(num_epochs): # 각 epoch마다
epoch_loss = 0
for b in range(num_batches_per_epoch):
# 배치 가져오기
b_idx = b * batch_size # batch start index
b_idx_e = b_idx + batch_size # batch end index
x, y_true = X_train[b_idx:b_idx_e], y_train[b_idx:b_idx_e]
# 배치에 최적화
y = self.forward(x)
epoch_loss += self.loss_fn(y, y_true) # 예측값과 실제값 비교
dL_dy = self.d_loss_fn(y, y_true)
self.backward(dL_dy) # = 역전파
self.optimize(learning_rate) # 최적화
loss.append(epoch_loss / num_batches_per_epoch)
# epoch마다 정확도를 측정
accuracy = self.evaluate(X_val,y_val)
print("Epoch {:4d}: training loss = {:.6f} | val accuracy = {:.2f}%".format(i, loss[i], accuracy * 100))Overfitting & underfitting
위에서 구현한 framework를 가지고 다양한 hyperparameter(계층 크기, learning-rate, batch size)를 활용하여, 여러개의 모델이 생성될 수 있습니다.
overfitting은 Network가 너무 복잡하거나 train dataset이 너무 적을때
발생하는데, train data에는 fit하게 학습되지만, 새로운 test data에 대해서는 오차가 크게 발생하는 것을 overfitting이라 합니다. 단지 Network가 훈련 집합을 외워버렸다고 생각하면 될 것 같습니다. 즉, 새로운 샘플에 적용할 만큼 일반화가 제대로 일아나지 않은 것이라 할 수 있습니다. 이를 해결하기 위해서는 데이터셋을 늘리거나, 규제 기법을 적용하는 등의 방법이 있습니다. 자세한 것은 뒤 chapter에서 다뤄보겠습니다!
underfitting은 Network가 충분한 매개변수를 가지지 못하였다는 것을 의미합니다 모델이 너무 단순해서 오차가 크게 발생한다고 생각하면 쉽겠네요!
아래의 그림을 보면 underfitting과 overfitting이 잘 이해될 겁니다!
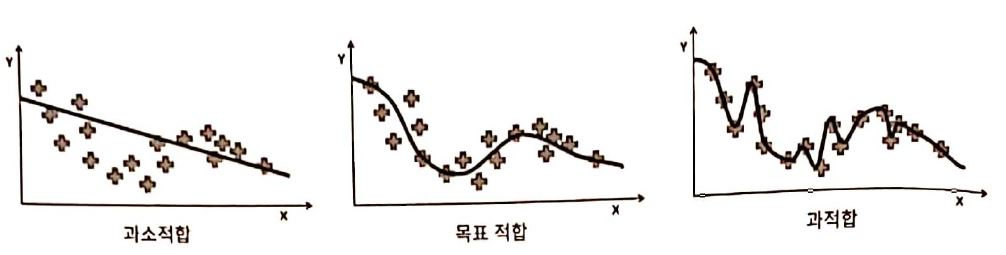
과소적합은 모델이 너무 단순한 것을, 과적합은 모델이 너무 복잡한 것을 확인할
수 있습니다!
Reference
- [실전 텐서플로 2를 활용한 딥러닝 컴퓨터 비전] chapter 01
