ROS
1.ROS terminologies

이 내용은 「ROS 프로그래밍, 표윤석 외 3인 저」 책의 내용을 참고했습니다! ROS ROS는 Robot Operating Systems의 약자로, 로봇 소프트웨어 플랫폼이다. 로봇 개발환경에 필요한 다양한 라이브러리 및 도구들을 제공한다. ROS Master R
2021년 9월 28일
2.[ROS] Optical flow를 이용한 turtlebot 조종
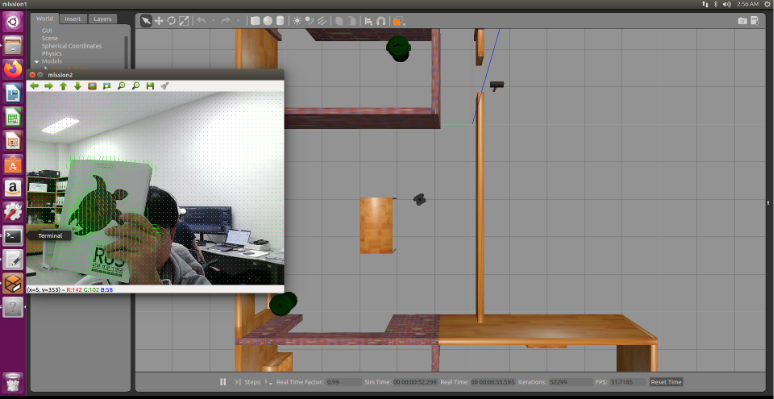
: 이번 포스팅은 turtlebot teleop(key) 패키지를 optical flow를 이용하여 직접 구현해보는 것입니니다. Camera node에서 publish한 이미지 메시지를 subscribe하여 optical flow를 통해 direction을 결정하고,
2022년 1월 18일
3.[ROS] gMapping SLAM 실습
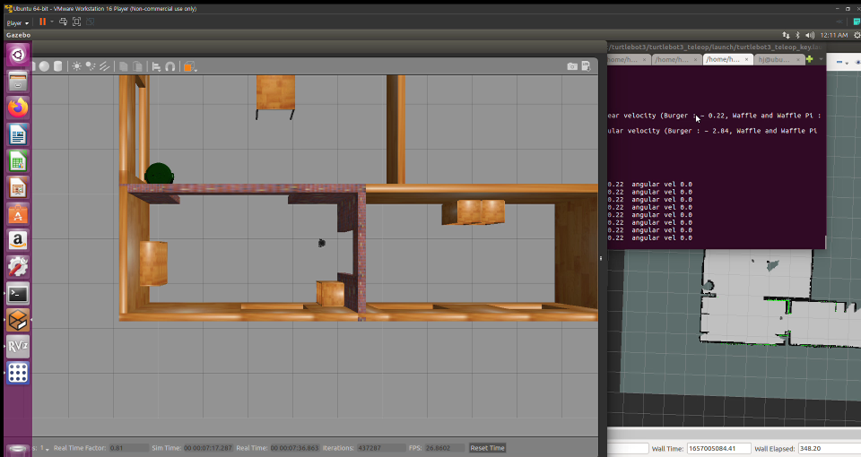
이번 포스트에서는 gMapping SLAM을 가제보 시뮬레이션에서 실습하는 포스트입니다.
2023년 1월 9일
4.[ROS] ORB SLAM 실습
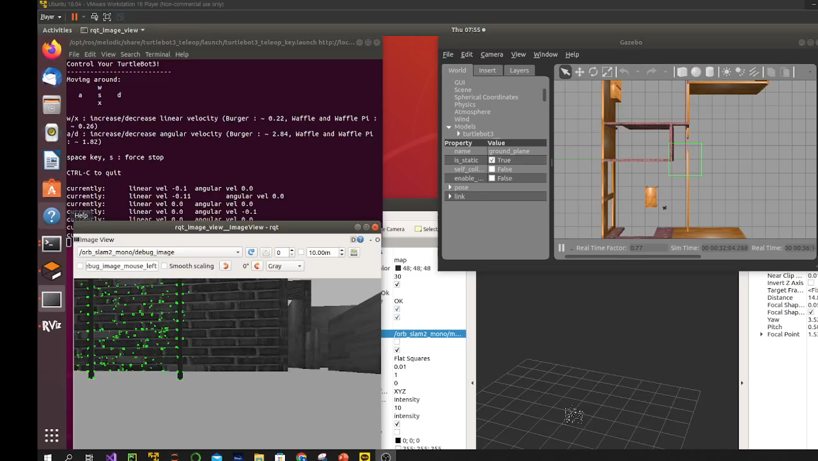
이번 포스트에서는 ORB SLAM2 패키지를 이용하여 monocular SLAM을 진행하고자 합니다.1) 먼저 ORB-SLAM2 를 catkin_ws/src 에 다운받습니다.2) 이 떄 주의해야 할 사항으로는, 배포된 코드에 error가 있으므로 이를 수정해주어야 합니
2023년 1월 9일
5.[ROS] Karto SLAM 실습

이번 포스트에서는 gMapping SLAM을 가제보 시뮬레이션에서 실습하는 포스트입니다.먼저 gMapping SLAM Package의 pipeline을 살펴보겠습니다1) Sensor 노드에서는 observation($$z\_{t}$$)값을 측정합니다2) 다음으로는 tu
2023년 1월 26일