Mission
차로 변경 안전성 향상을 위한 Responsibility-Sensitive Safety(RSS) 기반 확률론적 충돌 위험도 추정
https://www.dbpia.co.kr/journal/articleDetail?nodeId=NODE11220037
Scenario 1: 전측방 차량 사이로 차선 변경
전략
- Target1의 양보 의도 판단 후 위험도 감소
- Target2의 위험도를 줄이기 위해 자차 감속 후 차선변경 시도
관측
| Ego | Target1 | Target2 | |
|---|---|---|---|
| Velocity | O | O | O |
| LC Risk | O | O | O |
| Intention | O | ||
| Maneuver | O |
Scenario 2: 차선 변경 중 후측방 차량의 가속으로 차선변경 취소
전략
- 추월하는 Target1이 지나간 이후 차선 변경 시도 (위험도 0.2)
- 차선변경 중 Target2 감지하여 차선 변경 취소 동작 작동 (위험도 0.6)
| Ego | Target1 | Target2 | |
|---|---|---|---|
| Velocity | O | O | O |
| LC Risk | O | O | O |
| Maneuver | O |
Scenario 3: 차선 종류에 따른 차선 변경 차이
전략
- 타겟의 종류를 인지하여 종류에 따른 RSS parameter를 업데이트
- 대형차 인식 시 RSS parameter의 반응시간 증가, 제동력 감소로 충돌 안전거리 증가
- 대형차 인식 충돌 위험도 증가로 중형차 보다 안전한 차선 변경 시도
Motion Planning and Control
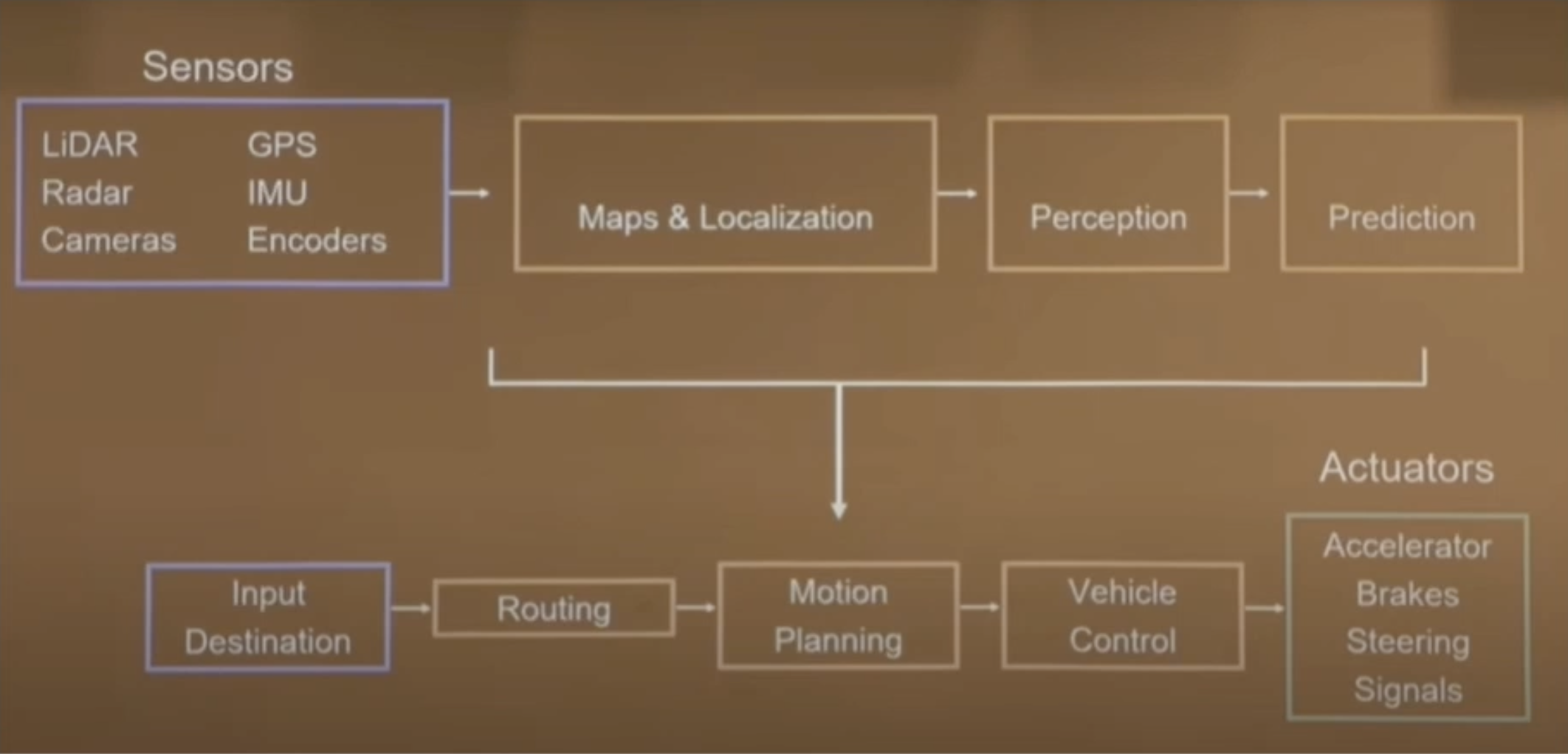
우버에서 제안한 Autonomous Vehicle diagram Process
Perception
- Sensors
- LiDAR
- Radar
- Cameras
- GPS
- IMU
- Encoders
- Maps & Localization : 위치 추정
- Perception : 센서를 통해 감지된 사물을 분류하고 인지하는 것
- Line Detection
- Traffic Light
- Trafftic Sign
- Object Detection
- Free Space Detection
- Prediction : 인식된 물체의 의도를 파악하고 주행 경로를 예측하는 것
Control
- Input Destination : 목적지를 입력
- Routing : 목적지까지 가는 길 (Global Planning)
- Motion Planning : 인지 정보를 활용하여 안전하고 편안한 경로를 계획하는 것
- 인지 정보: 교차로, 우회전 상황, 보행자가 횡단번호를 지나가지 않는 상황
- 움직임 계획: 정지선 앞에서 일시정지, 사람이 없으면 천천히 지나가!
- Vehicle Control
- 수많은 외란을 핸들하는 제어기 설계 필요
- Actuators
- Accelerator
- Brakes
- Steering
- Signals
성장지향형 자율주행 소프트웨어 개발자입니다. K-Digital-Training: 자율주행 데브코스 Planning & Control 1기로 활동하고 있습니다. 본 블로그를 통해 배움기록을 실천하고 있습니다. #자율주행 #기계공학
안녕하세요. 현재 자율주행 로봇의 SLAM 알고리즘을 개발하는 업무를 하고 있는 개발자입니다.
motion planning에 관련된 내용을 공유해주셔서 감사합니다~!
블로그의 다른 글들을 살펴보니 로봇 개발에 관심이 많으신 것 같아 로봇교육에 대한 간단한 대화(30~40분)를 나누고 싶어 이메일을 남깁니다.
irobou0915@gmail.com
오늘도 좋은 하루 보내세요!