이번에는 PVM Shield로 DC Motor/Buzzer를 제어해봤습니다.
DC Motor와 Buzzer 제어
DC Motor의 Control
DC 모터의 방향 제어
DC 모터의 방향은 H-Bridge를 이용해서 제어한다.
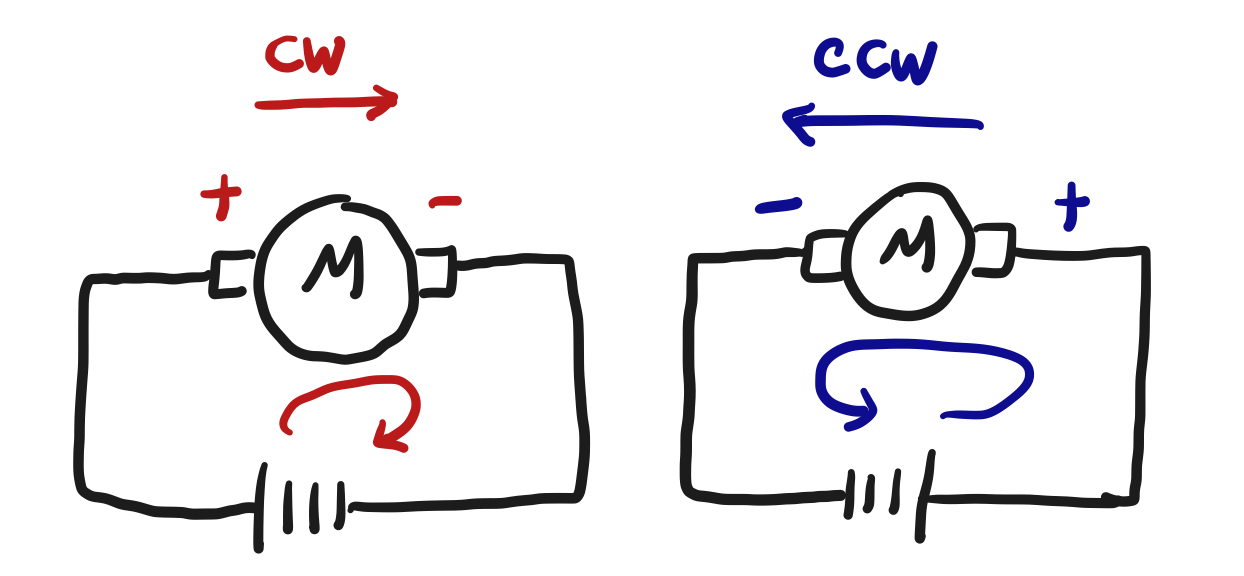
극성을 바꿔서 전류 흐름이 바뀔때 바뀐다.
-> 회로 구성시에는 극성을 바꿀 수 없다 !
: Transistor를 이용해서 Motor의 입장에서 브러쉬에 흐르는 전류의 방향을 바꿔준다.
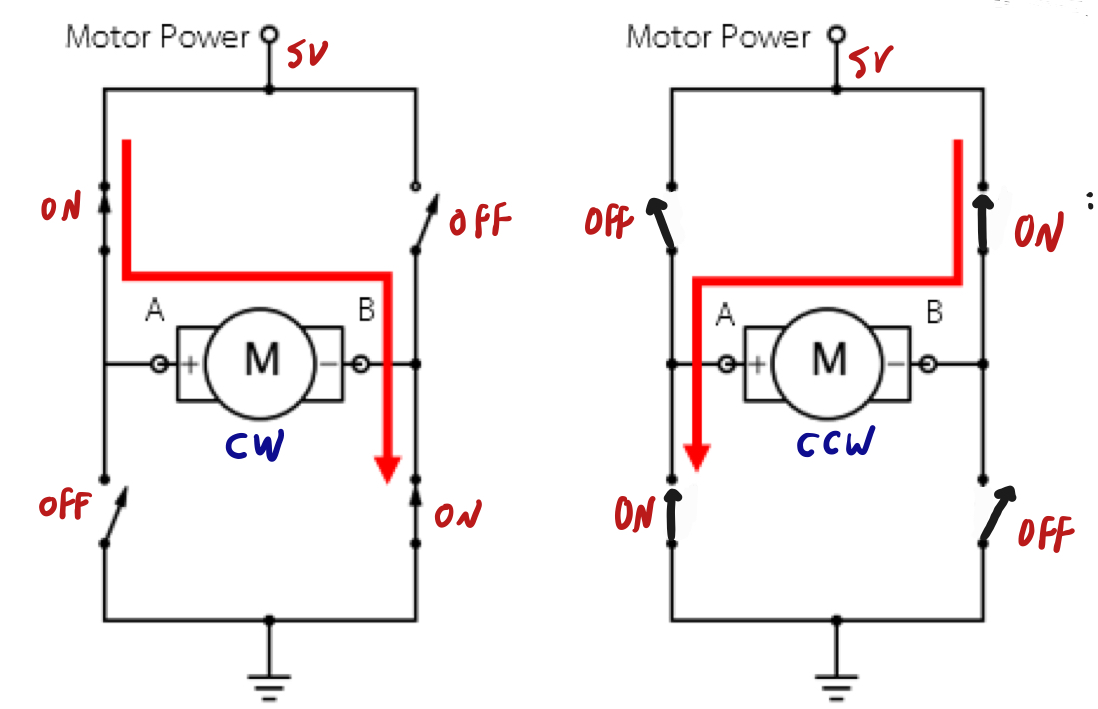
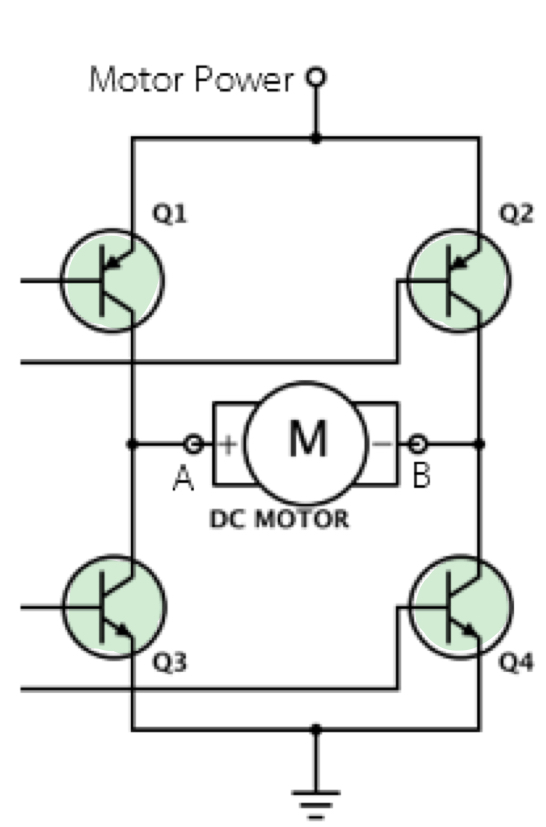
일종의 전기 스위치 역할을 하는 transistor 4개를 이용해서 H-Bridge를 구성한다.
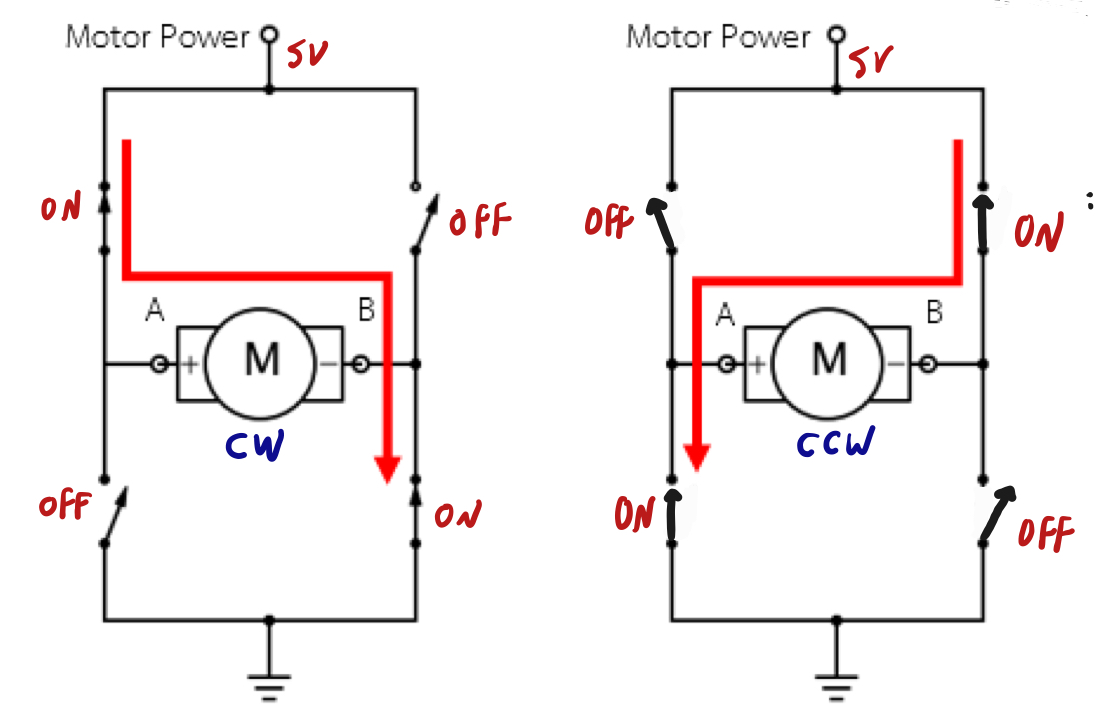
: 극성을 바꿔주지 않아도 TR를 이용해서 전류의 흐름만 바꿔준다.
-> ON되는 스위치에 PWM을 걸어줌
- 문제점 : DC 모터의 용량 제한
-> 모터의 종류와 용량에 따라서 다른 소자를 사용
-> 2~3A: TR로
-> 10A이상 : FET
-> 100A 이상 : 사이니스터
DC 모터의 속도 제어
: PWM의 duty를 이용해서 제어한다.
- duty란? 한 주기에서의 High Time
PWM Shield
- Motor Shield는 두개의 PWM Shield로 구성
-> Arduino의 digital port 5번과 6번에 각각 연결됨 - PWM Shield에서 PWM1, PWM2에 각각 진동 모터와 압전 스피커가 연결됨
- 스위치를 이용해서 모터와 스피커 중 제어 대상을 선택할 수 있음
- 아두이노에서 주기는 고정, duty로 회전 속도를 제어한다.
-> TR Base에 인가되는 PWM의 duty 비율이 증가하면 모터 회전 속도 증가
->TR Base에 인가되는 PWM의 duty 비율이 감소하면 모터 회전 속도 감소 - 아두이노에서 주파수는 고정, duty로 출력 음의 크기를 제어한다.
-> TR Base에 인가되는 PWM의 duty 비율이 증가하면 스피커에 강한 음
->TR Base에 인가되는 PWM의 duty 비율이 감소하면 스피커에 약한 음
-> tone() 함수를 이용하면 duty를 50으로 고정 & 주파수 변경이 가능
- Transistor가 필요한 이유? 증폭의 기능
: MCU단에서 구동 전류가 필요한데, 아두이노에서 나오는 전류는 20mA정도로 너무 작음 -> 모터 드라이버 회로가 필요한데 여기서는 그것을 TR로 구현
아두이노와 연결하기
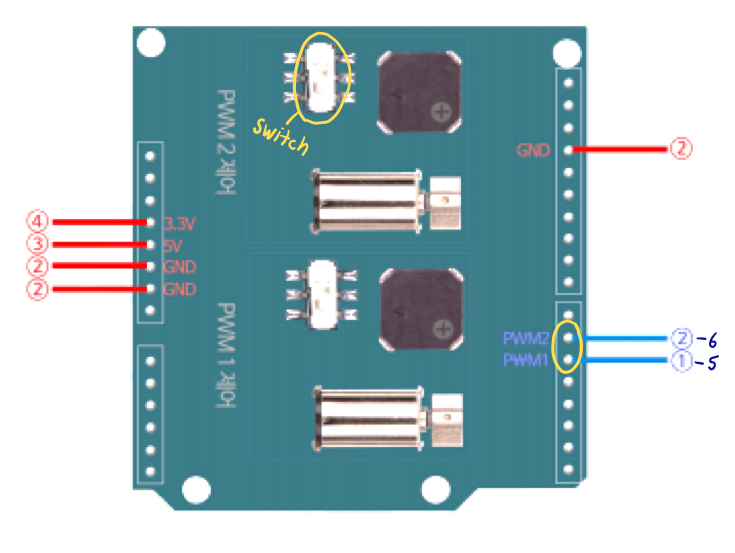
위와 같이 PWM1는 아두이노의 digital port 5번과 PWM2는 아두이노의 digital port 6번과 연결해준다.
PWM1의 진동모터 동작
int pwm1value = 0; // 초기 pwm의 값
void setup() {
// put your setup code here, to run once:
pinMode(5, OUTPUT);
}
void loop() {
// analogWrite() 함수를 이용해서 PWM을 만든다
analogWrite(5, pwm1value);
delay(500);
pwm1value += 10;
if (pwm1value > 255) {
pwm1value = 0;
}
}예제 코드들
- 1번째 DC motor의 속도 0.5초 간격으로 증가-감소
int pwm1value = 0; // 초기 pwm의 값
boolean increasing = true;
void setup() {
// put your setup code here, to run once:
pinMode(5, OUTPUT);
Serial.begin(9600);
}
void loop() {
// analogWrite() 함수를 이용해서 PWM을 만든다
Serial.println(pwm1value);
analogWrite(5, pwm1value);
delay(500);
if (increasing) {
pwm1value += 10;
} else {
pwm1value -= 10;
}
if (pwm1value > 255) {
increasing = false;
} else if (pwm1value < 0) {
increasing = true;
}
}
Hongik CE