Hough line detect
- 허프 변환은 특정한 형태를 가진 도형(선,다각형,원)을 검출 하는데 강점이 있는 알고리즘 이다.
Hough transformn
- 허프 변환이란 이미지의 공간 S에 있는 변수 를 파라미터 공간 P의 ab 평면으로 선형변환을 하여 기울기를 찾는 방법이다.
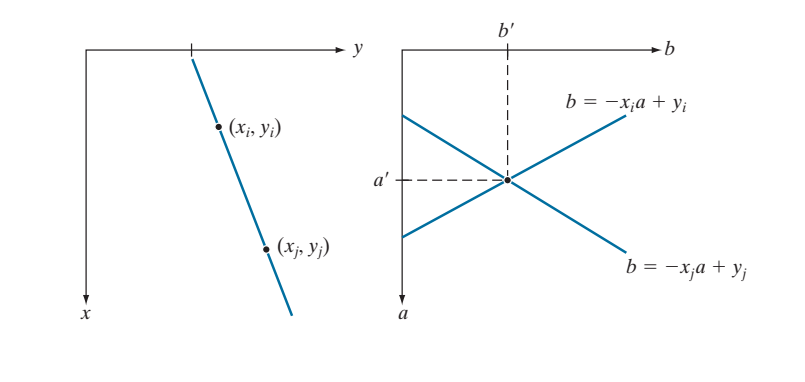
- xy 평면에서 픽셀값이 존재 하는 지점의 를 ab 평면으로 이동을 하면 , 의 2개의 직선 방정식으로 표현이 가능
- 여기서 직선 i 와 직선 j가 서로 평행하지 않는다면 공통된 값을 가지는 지점이 있음
- 그 값을 (a',b') 이라고 한다면 라는 식을 기존 이미지 공간 S에서 표현이 가능함
- a' : 두점을 모두 통과하는 직선의 기울기
- b' : 직선의 가중치
- 하지만 이 방법을 사용하게 되면 직선의 기울기가 y축가 평행이 될 경우 y절편값의 계산이 성립되지 않기 때문에 극좌표계로 계산식을 변경해서 사용함
Hough transformn polar axis
- 허프 변환을 xy 좌표계로 구현하게 되면 한계가 있어 이를 보완하기 위해 극좌표를 활용해서 변환을 함
- 에서 값은 이미지 크기보다 더 커질수가 없음
- 에서 값이 제한
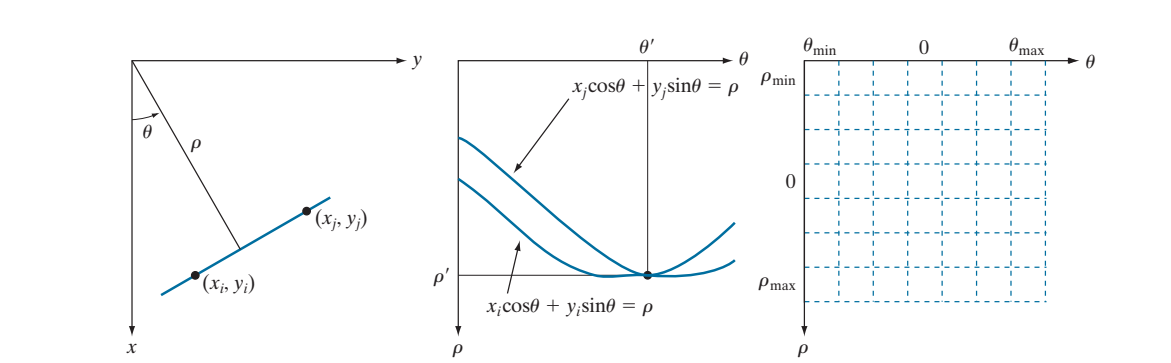
- xy 공간의 좌표값을 공간으로 이동하면 가운데 있는 그래프와 같이 삼각함수의 파형형식으로 표현이 가능함
- 2 파형이 서로 접촉이 되는 값을 취득하여 xy공간에서의 2점을 지나는 선분을 구할 수 있음
- 여기서 로 표현하지 않는 이유는 에 직교하는 직선으로 표현해야 되기 때문

imageprocessing and Data science